IMPALA¶
Overview¶
IMPALA, or the Importance Weighted Actor Learner Architecture, is an off-policy actor-critic framework that decouples acting from learning and learns from experience trajectories using V-trace. This method is first introduced in IMPALA: Scalable Distributed Deep-RL with Importance Weighted Actor-Learner Architectures.
Quick Facts¶
Impala is a model-free and off-policy RL algorithm.
Impala can support both discrete action spaces and continuous action spaces.
Impala is a actor-critic RL algorithm, which optimizes actor network and critic network, respectively.
Impala decouples acting from learning. Collectors in impala will not compute value or advantage.
Key Equations¶
Loss used in Impala is similar to that in PPO, A2C and other actor-critic model. All of them comes from policy_loss,value_loss and entropy_loss, with respect to some carefully chosen weights.
where w_value, w_entropy are loss weights for value and entropy.
NOTATION AND CONVENTIONS:
\(\pi_{\phi}\): current training policy parameterized by \(\phi\).
\(V_\theta\): value function parameterized by \(\theta\).
\(\mu\): older policy which generates trajectories in replay buffer.
At the training time \(t\), given transition \((x_t, a_t, x_{t+1}, r_t)\), the value function \(V_\theta\) is learned through an \(L_2\) loss between the current value and a V-trace target value. The n-step V-trace target at time s is defined as follows:
where \(\delta_t V \stackrel{def}{=} \rho_t (r_t + \gamma V(x_{t+1}) - V(x_t))\) is a temporal difference for \(V\).
\(\rho_t \stackrel{def}{=} \min\big(\bar{\rho}, \frac{\pi(a_t \vert x_t)}{\mu(a_t \vert x_t)}\big)\) and \(c_i \stackrel{def}{=} \min\big(\bar{c}, \frac{\pi(a_i \vert s_i)}{\mu(a_i \vert s_i)}\big)\) are truncated importance sampling (IS) weights, where \(\bar{\rho}\) and \(\bar{c}\) are two truncation constants with \(\bar{\rho} \geq \bar{c}\).
The product of \(c_s, \dots, c_{t-1}\) measures how much a temporal difference \(\delta_t V\) observed at time \(t\) impacts the update of the value function at a previous time \(s\) . In the on-policy case, we have \(\rho_t=1\) and \(c_i=1\) (assuming \(\bar{c} \geq 1)\) and therefore the V-trace target becomes on-policy n-step Bellman target.
\(\bar{\rho}\) impacts the fixed-point of the value function we converge to,and \(\bar{c}\) impacts the speed of convergence. When \(\bar{\rho} =\infty\) (untruncated), v-trace value function will converge to the value function of the target policy \(V_\pi\); when \(\bar{\rho}\) is close to 0, we evaluate the value function of the behavior policy \(V_\mu\); when in-between, we evaluate a policy between \(\pi\) and \(\mu\).
Therefore, loss functions are
where \(H(\pi_{\phi})\), entropy of policy \(\phi\), is an bonus to encourage exploration.
Value function parameter is updated in the direction of:
Policy parameter \(\phi\) is updated through policy gradient,
where \(r_s + \gamma v_{s+1}\) is the v-trace advantage, which is estimated Q value subtracted by a state-dependent baseline \(V_\theta(x_s)\).
Key Graphs¶
The following graph describes the process in IMPALA original paper. However, our implication is a little different from that in original paper.
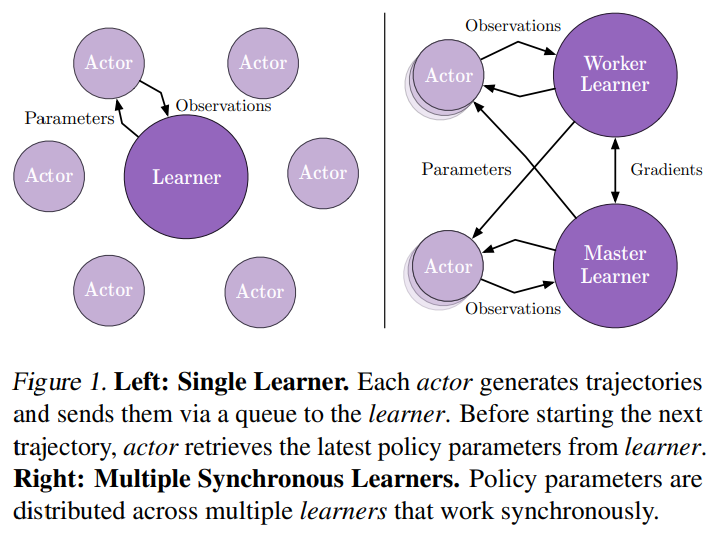
For single learner, they use multiple actors/collectors to generate training data. While in our setting, we use one collector which has multiple environments to increase data diversity.
For multiple learner, in original paper, different learners will have different actors with them. In other word, they will have different ReplayBuffer. While in our setting, all of the learners, will share the same ReplayBuffer, and will synchronize after each iteration.
Implementations¶
The default config is defined as follows:
- class ding.policy.impala.IMPALAPolicy(cfg: dict, model: Optional[Union[type, torch.nn.modules.module.Module]] = None, enable_field: Optional[List[str]] = None)[source]¶
- Overview:
Policy class of IMPALA algorithm.
- Config:
ID
Symbol
Type
Default Value
Description
Other(Shape)
1
typestr
impala
RL policy register name, refer toregistryPOLICY_REGISTRYthis arg is optional,a placeholder2
cudabool
False
Whether to use cuda for networkthis arg can be diff-erent from modes3
on_policybool
False
Whether the RL algorithm is on-policyor off-policyprioritybool
False
Whether use priority(PER)priority sample,update priority5
priority_IS_weightbool
False
Whether use Importance Sampling WeightIf True, prioritymust be True6
unroll_lenint
32
trajectory length to calculate v-tracetarget7
learn.updateper_collectint
4
How many updates(iterations) to trainafter collector’s one collection. Onlyvalid in serial trainingthis args can be varyfrom envs. Bigger valmeans more off-policy
Usually, we hope to compute everything as a batch to improve efficiency. Especially, when computing vtrace, we
need all training sample (sequences of training data) have the same length. This is done in policy._get_train_sample.
Once we execute this function in collector, the length of samples will equal to unroll-len in config. For details, please
refer to doc of ding.rl_utils.adder.
def _get_train_sample(self, data: List[Dict[str, Any]]) -> List[Dict[str, Any]]:
return get_train_sample(data, self._unroll_len)
def get_train_sample(cls, data: List[Dict[str, Any]], unroll_len: int, last_fn_type: str = 'last') -> List[Dict[str, Any]]:
"""
Overview:
Process raw traj data by updating keys ['next_obs', 'reward', 'done'] in data's dict element.
If ``unroll_len`` equals to 1, which means no process is needed, can directly return ``data``.
Otherwise, ``data`` will be split according to ``self._unroll_len``, process residual part according to
``last_fn_type`` and call ``lists_to_dicts`` to form sampled training data.
Arguments:
- data (:obj:`List[Dict[str, Any]]`): transitions list, each element is a transition dict
Returns:
- data (:obj:`List[Dict[str, Any]]`): transitions list processed after unrolling
"""
if unroll_len == 1:
return data
else:
# cut data into pieces whose length is unroll_len
split_data, residual = list_split(data, step=self._unroll_len)
def null_padding():
template = copy.deepcopy(residual[0])
template['done'] = True
template['reward'] = torch.zeros_like(template['reward'])
if 'value_gamma' in template:
template['value_gamma'] = 0.
null_data = [cls._get_null_transition(template) for _ in range(miss_num)]
return null_data
if residual is not None:
miss_num = unroll_len - len(residual)
if last_fn_type == 'drop':
# drop the residual part
pass
elif last_fn_type == 'last':
if len(split_data) > 0:
# copy last datas from split_data's last element, and insert in front of residual
last_data = copy.deepcopy(split_data[-1][-miss_num:])
split_data.append(last_data + residual)
else:
# get null transitions using ``null_padding``, and insert behind residual
null_data = null_padding()
split_data.append(residual + null_data)
elif last_fn_type == 'null_padding':
# same to the case of 'last' type and split_data is empty
null_data = null_padding()
split_data.append(residual + null_data)
# collate unroll_len dicts according to keys
if len(split_data) > 0:
split_data = [lists_to_dicts(d, recursive=True) for d in split_data]
return split_data
Note
In get_train_sample, we introduce three ways to cut trajectory data into same-length pieces (length equal
to unroll_len).
The first one is drop, this means after splitting trajectory data into small pieces, we simply throw away those
with length smaller than unroll_len. This method is kind of naive and usually is not a good choice. Since in
Reinforcement Learning, the last few data in an episode is usually very important, we can’t just throw away them.
The second method is last, which means if the total length trajectory is smaller than unrollen_len,
we will use zero padding. Else, we will use data from previous piece to pad residual piece. This method is set as
default and recommended.
The last method null_padding is just zero padding, which is not vert efficient since many data will be null.
Now, we introduce the computation of vtrace-value. First, we use the following functions to compute importance_weights.
def compute_importance_weights(target_output, behaviour_output, action, requires_grad=False):
"""
Shapes:
- target_output (:obj:`torch.FloatTensor`): :math:`(T, B, N)`, where T is timestep, B is batch size and\
N is action dim
- behaviour_output (:obj:`torch.FloatTensor`): :math:`(T, B, N)`
- action (:obj:`torch.LongTensor`): :math:`(T, B)`
- rhos (:obj:`torch.FloatTensor`): :math:`(T, B)`
"""
grad_context = torch.enable_grad() if requires_grad else torch.no_grad()
assert isinstance(action, torch.Tensor)
device = action.device
with grad_context:
dist_target = torch.distributions.Categorical(logits=target_output)
dist_behaviour = torch.distributions.Categorical(logits=behaviour_output)
rhos = dist_target.log_prob(action) - dist_behaviour.log_prob(action)
rhos = torch.exp(rhos)
return rhos
After that, we clip importance weights based on constant \(\rho\) and \(c\) to get clipped_rhos, clipped_cs. Then we can compute vtrace value according to the following function. Notice, here bootstrap_values are just value function \(V(x_s)\) in vtrace definition.
def vtrace_nstep_return(clipped_rhos, clipped_cs, reward, bootstrap_values, gamma=0.99, lambda_=0.95):
"""
Shapes:
- clipped_rhos (:obj:`torch.FloatTensor`): :math:`(T, B)`, where T is timestep, B is batch size
- clipped_cs (:obj:`torch.FloatTensor`): :math:`(T, B)`
- reward: (:obj:`torch.FloatTensor`): :math:`(T, B)`
- bootstrap_values (:obj:`torch.FloatTensor`): :math:`(T+1, B)`
- vtrace_return (:obj:`torch.FloatTensor`): :math:`(T, B)`
"""
deltas = clipped_rhos * (reward + gamma * bootstrap_values[1:] - bootstrap_values[:-1])
factor = gamma * lambda_
result = bootstrap_values[:-1].clone()
vtrace_item = 0.
for t in reversed(range(reward.size()[0])):
vtrace_item = deltas[t] + factor * clipped_cs[t] * vtrace_item
result[t] += vtrace_item
return result
Note
1. Bootstrap_values in this part need to have size (T+1,B),where T is timestep, B is batch size. The reason is that we need a sequence of training data with same-length vtrace value (this length is just the unroll_len in config). And in order to compute the last vtrace value in the sequence, we need at least one more target value. This is done using the next_obs of the last transition in training data sequence.
2. Here we introduce a parameter lambda_, following the implementation in AlphaStar. The parameter, between 0
and 1,can give a subtle control on vtrace off-policy correction. Usually, we will choose this parameter close to 1.
Once we get vtrace value, or vtrace_nstep_return, the computation of loss functions are straightforward. The whole
process is as follows.
def vtrace_advantage(clipped_pg_rhos, reward, return_, bootstrap_values, gamma):
"""
Shapes:
- clipped_pg_rhos (:obj:`torch.FloatTensor`): :math:`(T, B)`, where T is timestep, B is batch size
- reward: (:obj:`torch.FloatTensor`): :math:`(T, B)`
- return_ (:obj:`torch.FloatTensor`): :math:`(T, B)`
- bootstrap_values (:obj:`torch.FloatTensor`): :math:`(T, B)`
- vtrace_advantage (:obj:`torch.FloatTensor`): :math:`(T, B)`
"""
return clipped_pg_rhos * (reward + gamma * return_ - bootstrap_values)
def vtrace_error(
data: namedtuple,
gamma: float = 0.99,
lambda_: float = 0.95,
rho_clip_ratio: float = 1.0,
c_clip_ratio: float = 1.0,
rho_pg_clip_ratio: float = 1.0):
"""
Shapes:
- target_output (:obj:`torch.FloatTensor`): :math:`(T, B, N)`, where T is timestep, B is batch size and\
N is action dim
- behaviour_output (:obj:`torch.FloatTensor`): :math:`(T, B, N)`
- action (:obj:`torch.LongTensor`): :math:`(T, B)`
- value (:obj:`torch.FloatTensor`): :math:`(T+1, B)`
- reward (:obj:`torch.LongTensor`): :math:`(T, B)`
- weight (:obj:`torch.LongTensor`): :math:`(T, B)`
"""
target_output, behaviour_output, action, value, reward, weight = data
with torch.no_grad():
IS = compute_importance_weights(target_output, behaviour_output, action)
rhos = torch.clamp(IS, max=rho_clip_ratio)
cs = torch.clamp(IS, max=c_clip_ratio)
return_ = vtrace_nstep_return(rhos, cs, reward, value, gamma, lambda_)
pg_rhos = torch.clamp(IS, max=rho_pg_clip_ratio)
return_t_plus_1 = torch.cat([return_[1:], value[-1:]], 0)
adv = vtrace_advantage(pg_rhos, reward, return_t_plus_1, value[:-1], gamma)
if weight is None:
weight = torch.ones_like(reward)
dist_target = torch.distributions.Categorical(logits=target_output)
pg_loss = -(dist_target.log_prob(action) * adv * weight).mean()
value_loss = (F.mse_loss(value[:-1], return_, reduction='none') * weight).mean()
entropy_loss = (dist_target.entropy() * weight).mean()
return vtrace_loss(pg_loss, value_loss, entropy_loss)
Note
The shape of value in input data should be (T+1, B), the reason is same as above Note.
Here we introduce a parameter
rho_pg_clip_ratio, following the implementation in AlphaStar. This parameter, can give a subtle control on vtrace advantage. Usually, we will choose this parameter just same as rho_clip_ratio.
The default config of IMPALAPolicy is defined as follows:
- class ding.policy.impala.IMPALAPolicy(cfg: dict, model: Optional[Union[type, torch.nn.modules.module.Module]] = None, enable_field: Optional[List[str]] = None)[source]
- Overview:
Policy class of IMPALA algorithm.
- Config:
ID
Symbol
Type
Default Value
Description
Other(Shape)
1
typestr
impala
POLICY_REGISTRY2
cudabool
False
3
on_policybool
False
prioritybool
False
5
priority_IS_weightbool
False
6
unroll_lenint
32
7
learn.updateper_collectint
4
The network interface IMPALA used is defined as follows:
- class ding.model.template.vac.VAC(obs_shape: Union[int, ding.utils.type_helper.SequenceType], action_shape: Union[int, ding.utils.type_helper.SequenceType], share_encoder: bool = True, continuous: bool = False, encoder_hidden_size_list: ding.utils.type_helper.SequenceType = [128, 128, 64], actor_head_hidden_size: int = 64, actor_head_layer_num: int = 1, critic_head_hidden_size: int = 64, critic_head_layer_num: int = 1, activation: Optional[torch.nn.modules.module.Module] = ReLU(), norm_type: Optional[str] = None, sigma_type: Optional[str] = 'independent', bound_type: Optional[str] = None)[source]
- Overview:
The VAC model.
- Interfaces:
__init__,forward,compute_actor,compute_critic
- __init__(obs_shape: Union[int, ding.utils.type_helper.SequenceType], action_shape: Union[int, ding.utils.type_helper.SequenceType], share_encoder: bool = True, continuous: bool = False, encoder_hidden_size_list: ding.utils.type_helper.SequenceType = [128, 128, 64], actor_head_hidden_size: int = 64, actor_head_layer_num: int = 1, critic_head_hidden_size: int = 64, critic_head_layer_num: int = 1, activation: Optional[torch.nn.modules.module.Module] = ReLU(), norm_type: Optional[str] = None, sigma_type: Optional[str] = 'independent', bound_type: Optional[str] = None) None[source]
- Overview:
Init the VAC Model according to arguments.
- Arguments:
obs_shape (
Union[int, SequenceType]): Observation’s space.action_shape (
Union[int, SequenceType]): Action’s space.share_encoder (
bool): Whether share encoder.continuous (
bool): Whether collect continuously.encoder_hidden_size_list (
SequenceType): Collection ofhidden_sizeto pass toEncoderactor_head_hidden_size (
Optional[int]): Thehidden_sizeto pass to actor-nn’sHead.
- actor_head_layer_num (
int):The num of layers used in the network to compute Q value output for actor’s nn.
critic_head_hidden_size (
Optional[int]): Thehidden_sizeto pass to critic-nn’sHead.
- critic_head_layer_num (
int):The num of layers used in the network to compute Q value output for critic’s nn.
- activation (
Optional[nn.Module]):The type of activation function to use in
MLPthe afterlayer_fn, ifNonethen default set tonn.ReLU()
- norm_type (
Optional[str]):The type of normalization to use, see
ding.torch_utils.fc_blockfor more details`
- forward(inputs: Union[torch.Tensor, Dict], mode: str) Dict[source]
- Overview:
Use encoded embedding tensor to predict output. Parameter updates with VAC’s MLPs forward setup.
- Arguments:
- Forward with
'compute_actor'or'compute_critic':
- inputs (
torch.Tensor):The encoded embedding tensor, determined with given
hidden_size, i.e.(B, N=hidden_size). Whetheractor_head_hidden_sizeorcritic_head_hidden_sizedepend onmode.- Returns:
- outputs (
Dict):Run with encoder and head.
- Forward with
'compute_actor', Necessary Keys:
logit (
torch.Tensor): Logit encoding tensor, with same size as inputx.- Forward with
'compute_critic', Necessary Keys:
value (
torch.Tensor): Q value tensor with same size as batch size.- Shapes:
inputs (
torch.Tensor): \((B, N)\), where B is batch size and N correspondinghidden_sizelogit (
torch.FloatTensor): \((B, N)\), where B is batch size and N isaction_shapevalue (
torch.FloatTensor): \((B, )\), where B is batch size.- Actor Examples:
- Critic Examples:
- Actor-Critic Examples:
The Benchmark result of IMPALA implemented in DI-engine is shown in Benchmark
Reference¶
Lasse Espeholt, Hubert Soyer, Remi Munos, Karen Simonyan, Volodymir Mnih, Tom Ward, Yotam Doron, Vlad Firoiu, Tim Harley, Iain Dunning, Shane Legg, Koray Kavukcuoglu: “IMPALA: Scalable Distributed Deep-RL with Importance Weighted Actor-Learner Architectures”, 2018; arXiv:1802.01561. https://arxiv.org/abs/1802.01561