Add md files to dev_kit
Showing
此差异已折叠。
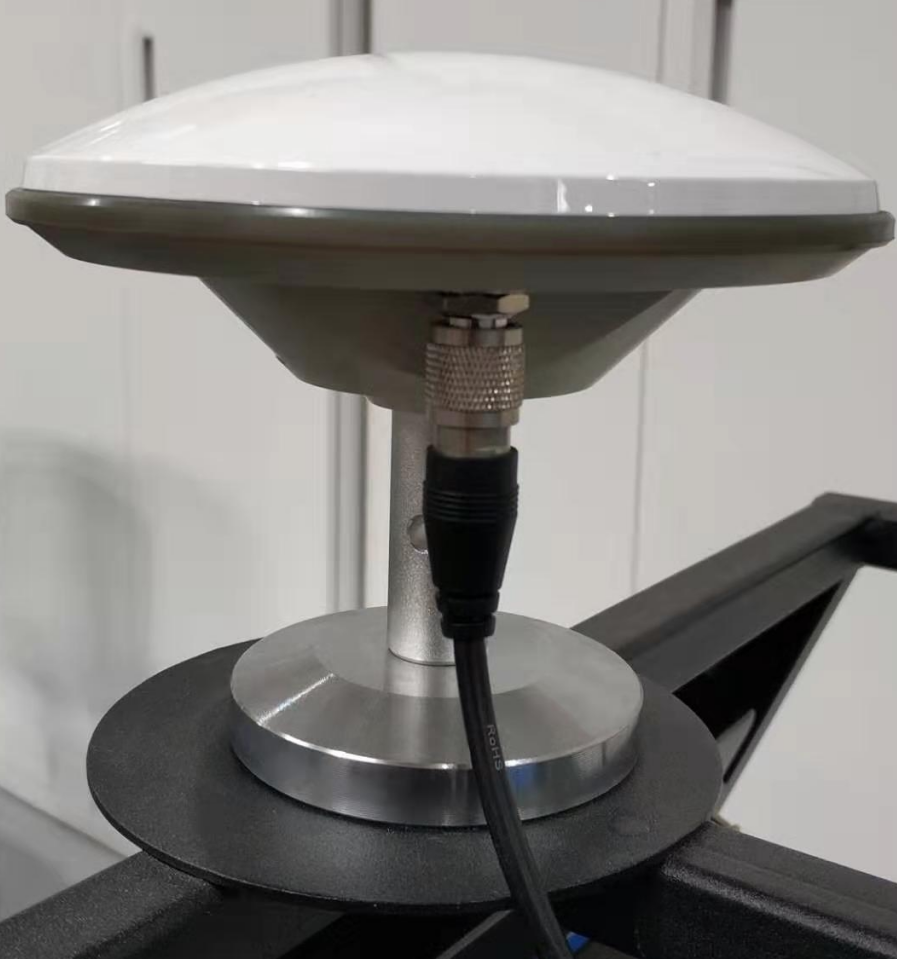
docs/specs/images/imu_ante.png
0 → 100644
{kind=link}
416.0 KB
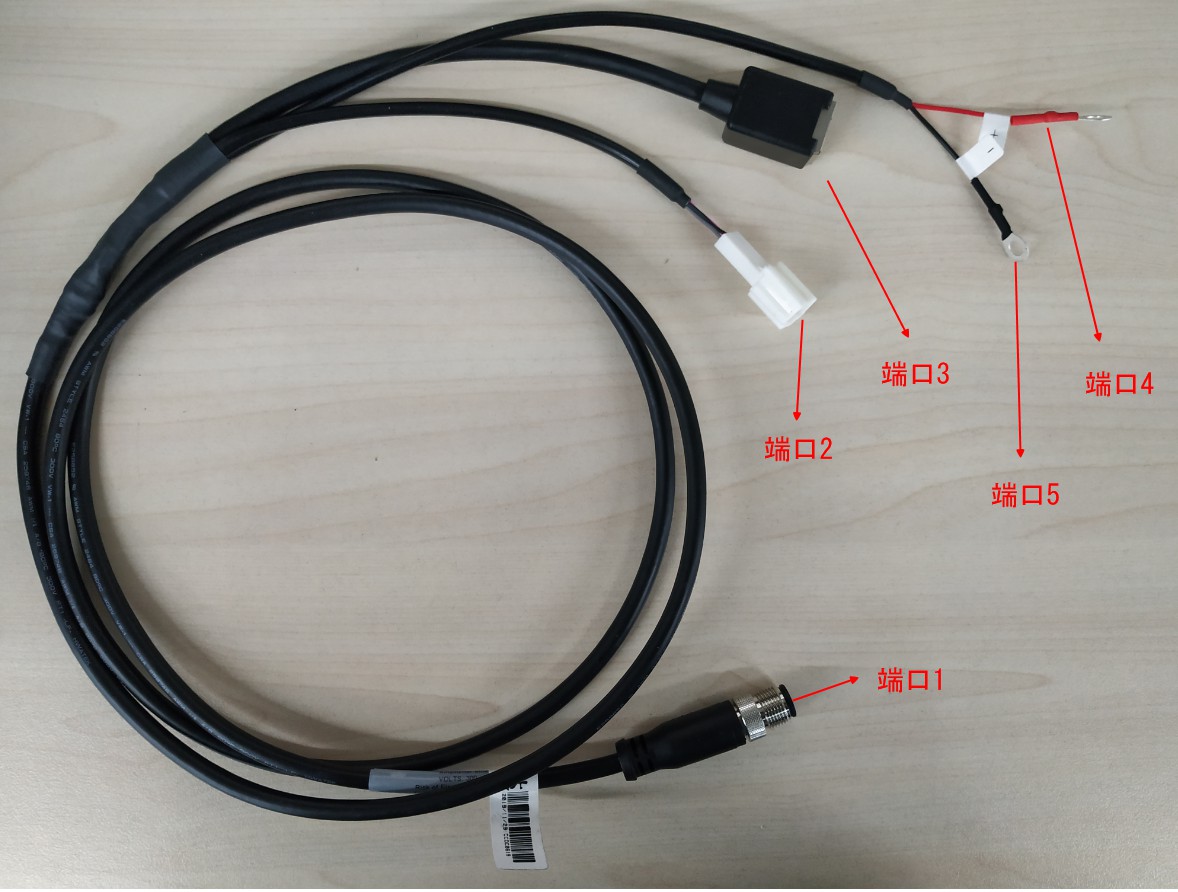
docs/specs/images/imu_com.png
0 → 100644
{kind=link}

2.2 MB
{kind=link}

1.5 MB
{kind=link}

4.0 MB
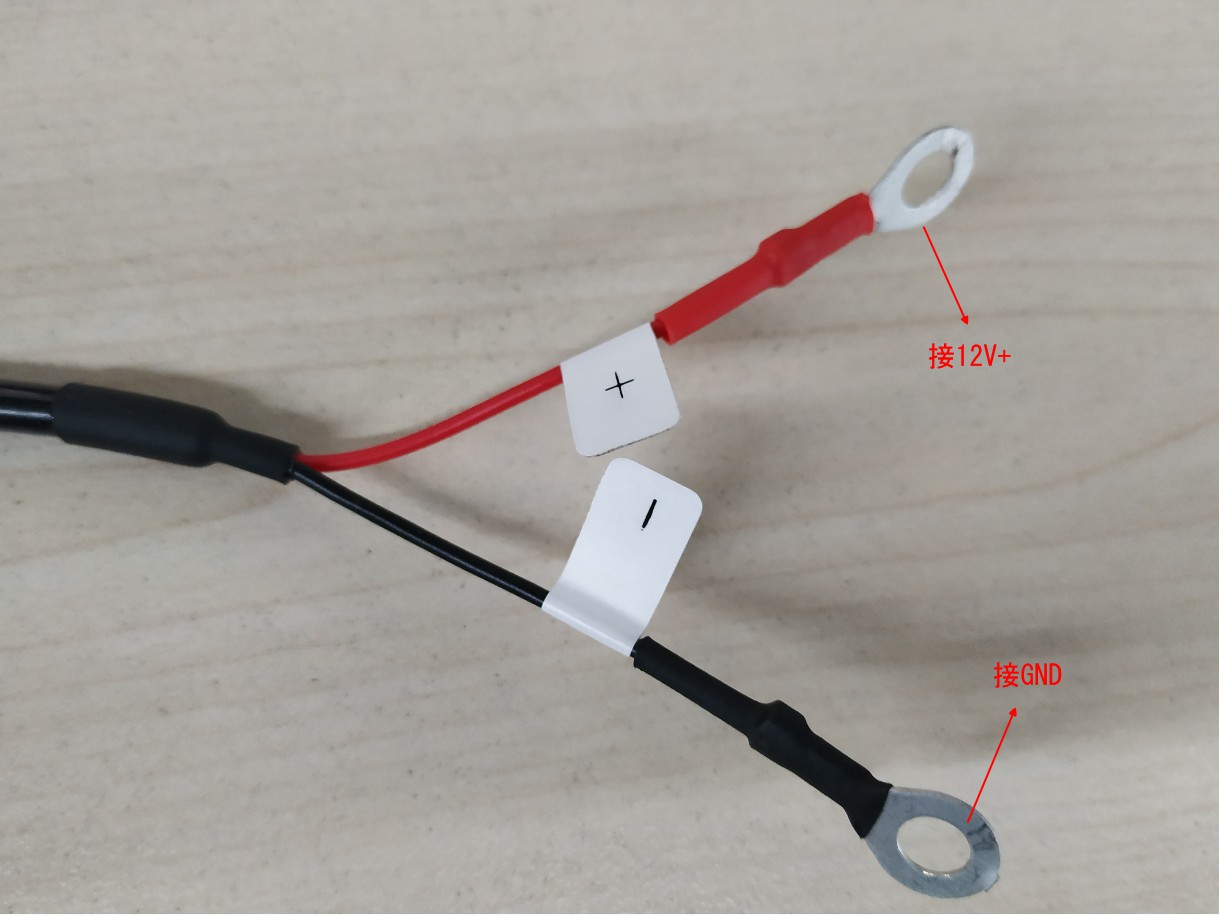
docs/specs/images/imu_tnc.png
0 → 100644
{kind=link}

812.2 KB
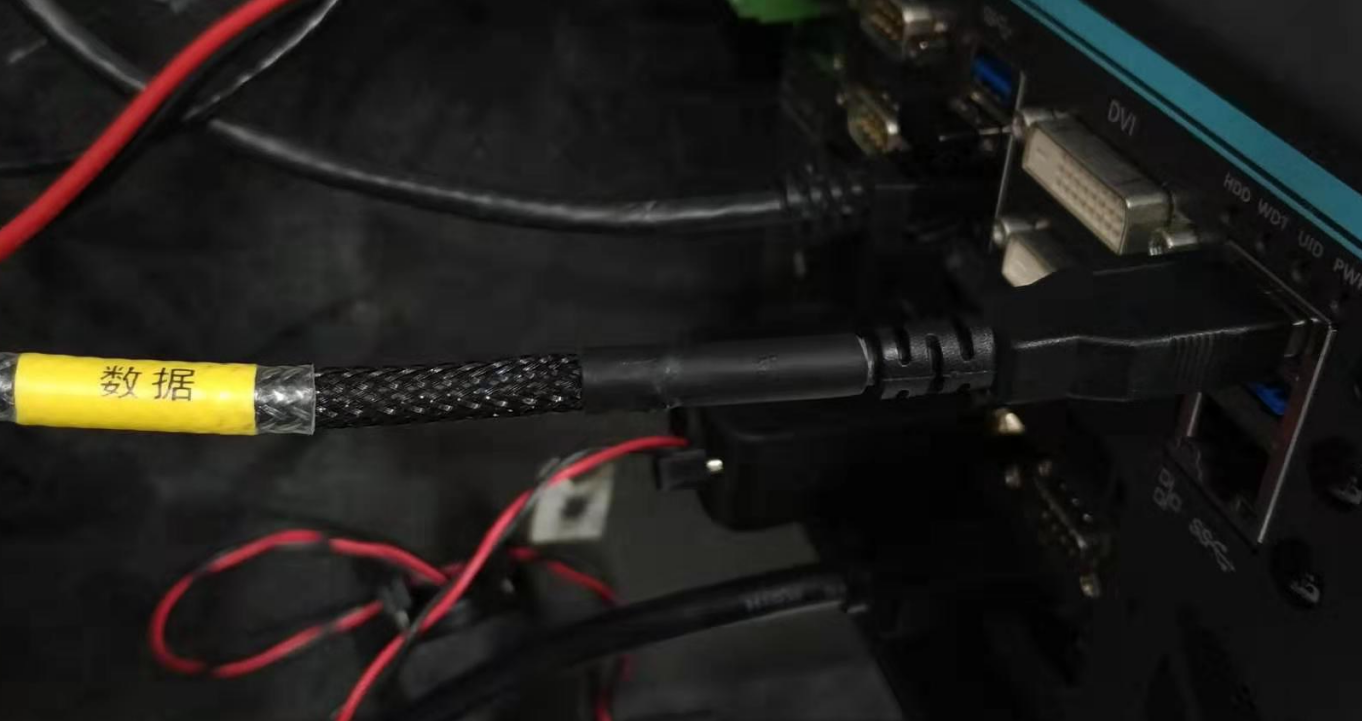
docs/specs/images/imu_usb.png
0 → 100644
{kind=link}
895.6 KB
{kind=link}

75.5 KB
docs/specs/images/lidar_line.jpeg
0 → 100644
{kind=link}
166.7 KB
{kind=link}
118.1 KB