update ppvehicle modelzoo (#6679)
* update ppvehicle modelzoo; test=document_fix * update pipeline pictures * update * fix platerec jetson trtfp16; test=document_fix * replace all --model_dir in pipeline docs; test=document_fix
Showing
{kind=link}
{kind=link}
| W: | H:
| W: | H:
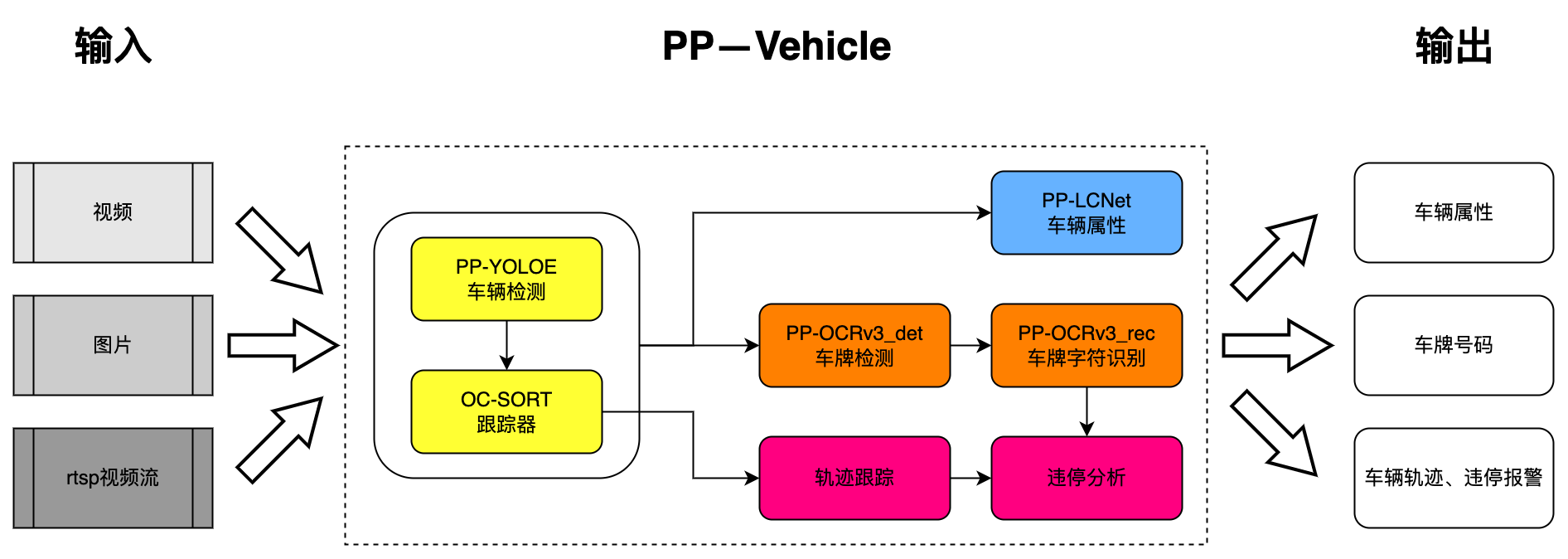
docs/images/ppvehicle.png
0 → 100644
{kind=link}
127.1 KB