
add gesture app
Showing
applications/gesture_local_app.py
0 → 100644
lib/gesture_lib/cfg/handpose.cfg
0 → 100644
lib/gesture_lib/cores/hand_pnp.py
0 → 100644
lib/gesture_lib/doc/README.md
0 → 100644
lib/gesture_lib/utils/utils.py
0 → 100644
{kind=link}

2.9 KB
{kind=link}

6.2 KB
{kind=link}

5.5 KB
{kind=link}

4.6 KB
{kind=link}
18.1 KB
{kind=link}

1.7 KB
{kind=link}

3.1 KB
{kind=link}

4.9 KB
{kind=link}

1.6 KB
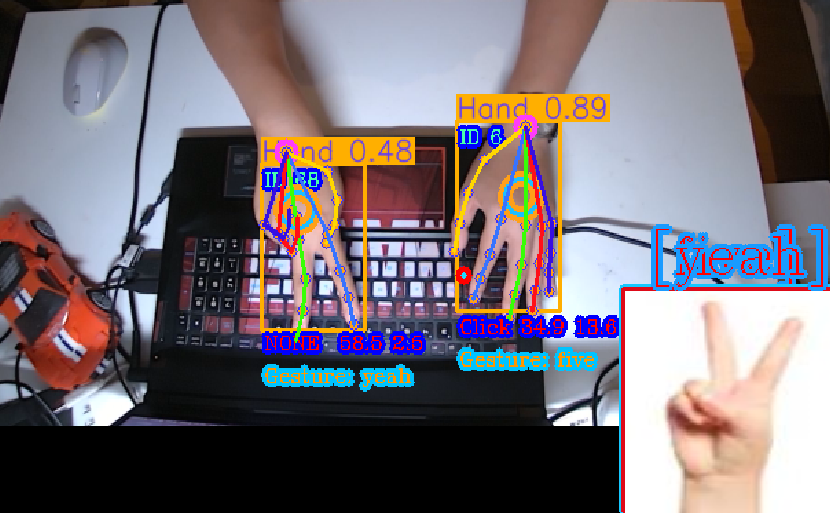
samples/gesture.png
0 → 100644
{kind=link}
338.3 KB