Merge branch 'master' of https://github.com/PaddlePaddle/PaddleSeg
track official
Showing
dataset/README.md
0 → 100644
dataset/convert_voc2012.py
0 → 100644
docs/annotation/README.md
已删除
100644 → 0
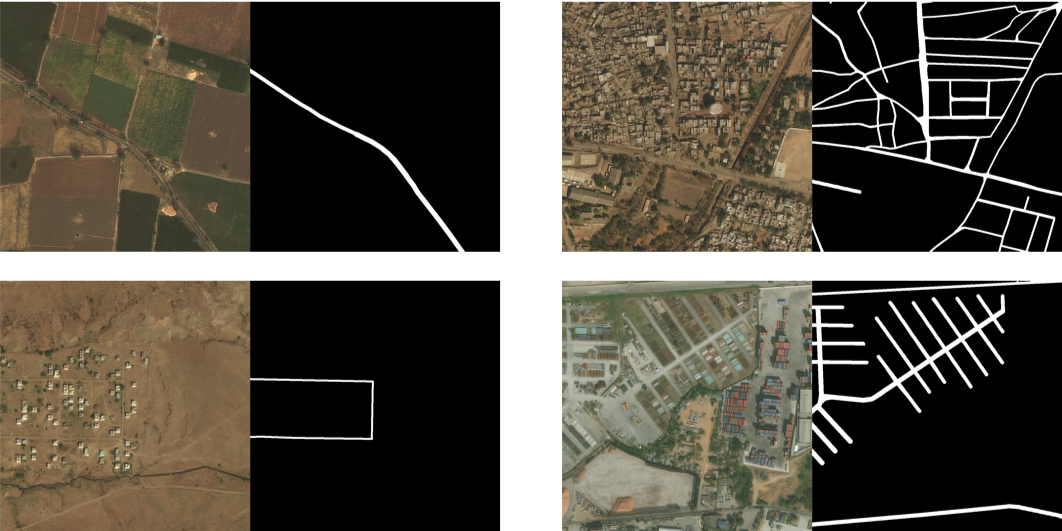
docs/imgs/deepglobe.png
0 → 100644
{kind=link}
659.8 KB
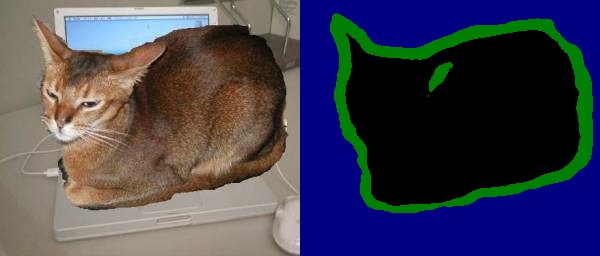
docs/imgs/dice1.png
0 → 100644
{kind=link}

7.9 KB
docs/imgs/file_list2.png
0 → 100644
{kind=link}
90.6 KB
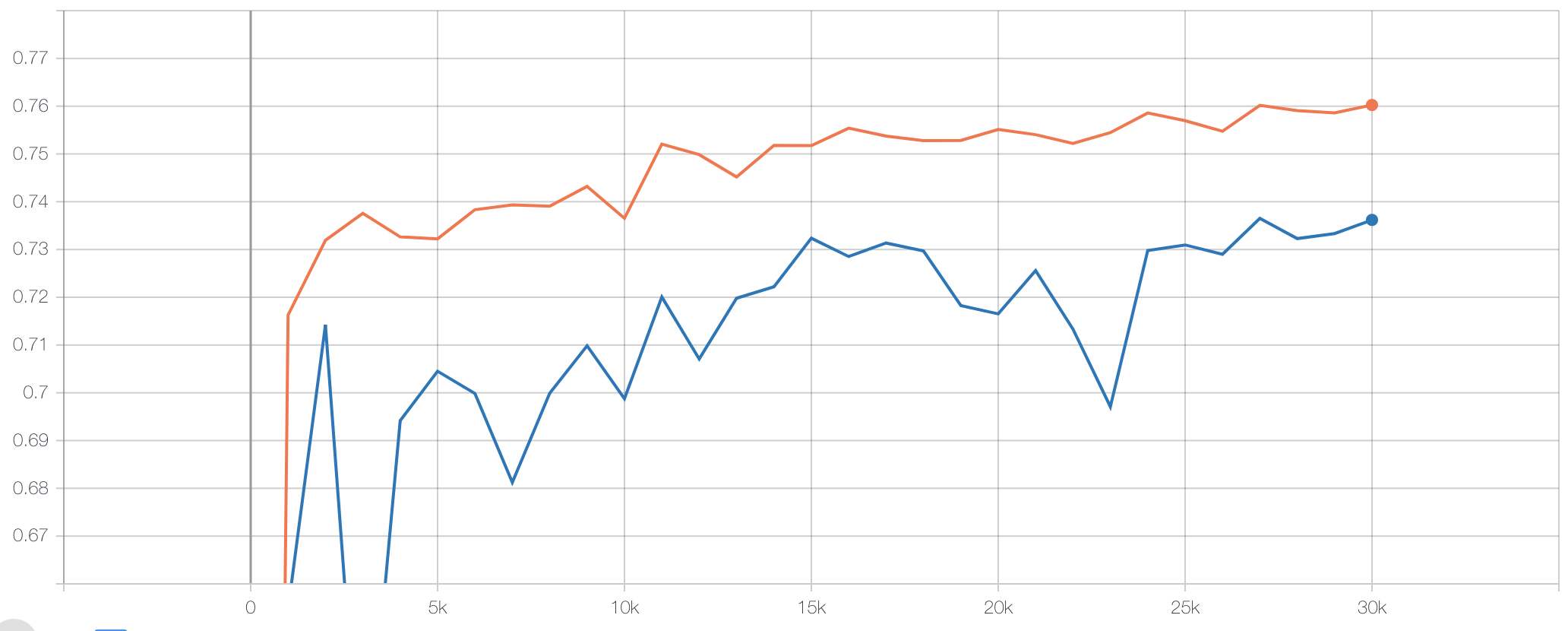
docs/imgs/loss_comparison.png
0 → 100644
{kind=link}
123.5 KB
docs/imgs/usage_vis_demo.jpg
0 → 100644
{kind=link}

65.0 KB
docs/imgs/usage_vis_demo2.jpg
0 → 100644
{kind=link}
33.4 KB
docs/imgs/usage_vis_demo3.jpg
0 → 100644
{kind=link}

91.4 KB
docs/loss_select.md
0 → 100644
此差异已折叠。
pdseg/tools/__init__.py
0 → 100644
pdseg/utils/dist_utils.py
0 → 100755