Repalce fruit dataset with roadsign dataset, and update QUICK_STARTED, use...
Repalce fruit dataset with roadsign dataset, and update QUICK_STARTED, use PP-YOLO as demo, test=document_fix. (#1407)
Showing
demo/road554.png
0 → 100644
{kind=link}

188.8 KB
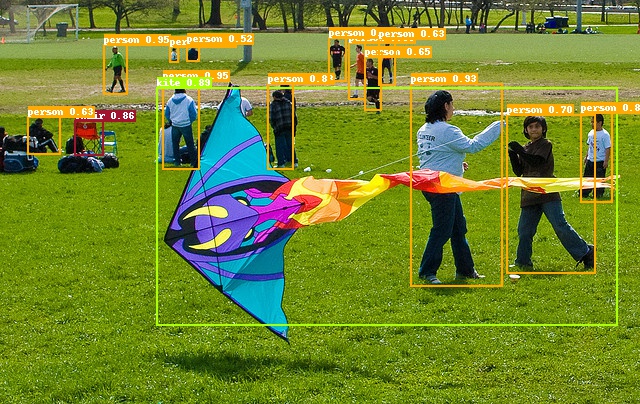
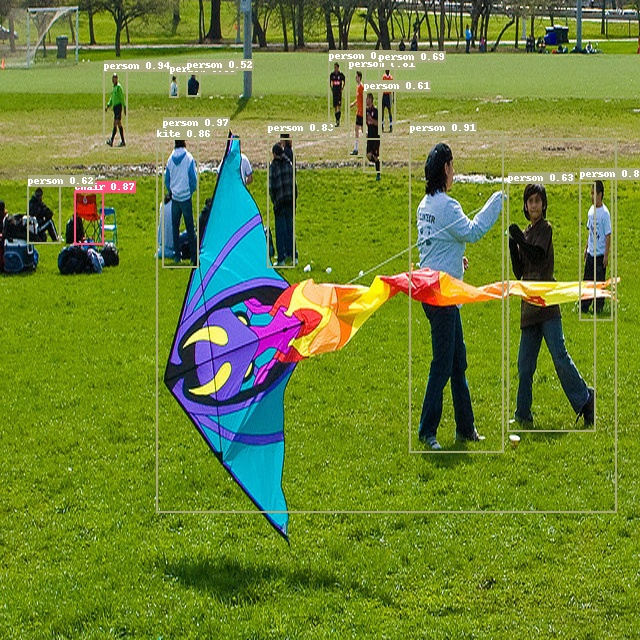
docs/images/000000014439.jpg
0 → 100644
{kind=link}
202.7 KB
{kind=link}
273.6 KB
docs/images/road554.png
0 → 100644
{kind=link}

142.3 KB