[bsp][esp][esp32c3] add the bsp of esp32c3 (#5869)
* add the ESP32_C3 first version * add the blinky ok version * fix the code * format file * add the readme * fix the formate * Update README.md * Update main.c * fix the readme * fix rtconfig.h * remove cpp config
Showing
bsp/ESP32_C3/.vscode/launch.json
0 → 100644
bsp/ESP32_C3/.vscode/tasks.json
0 → 100644
bsp/ESP32_C3/CMakeLists.txt
0 → 100644
bsp/ESP32_C3/Makefile
0 → 100644
bsp/ESP32_C3/README.md
0 → 100644
bsp/ESP32_C3/images/build.png
0 → 100644
{kind=link}

12.6 KB
bsp/ESP32_C3/images/burn.png
0 → 100644
{kind=link}

16.1 KB
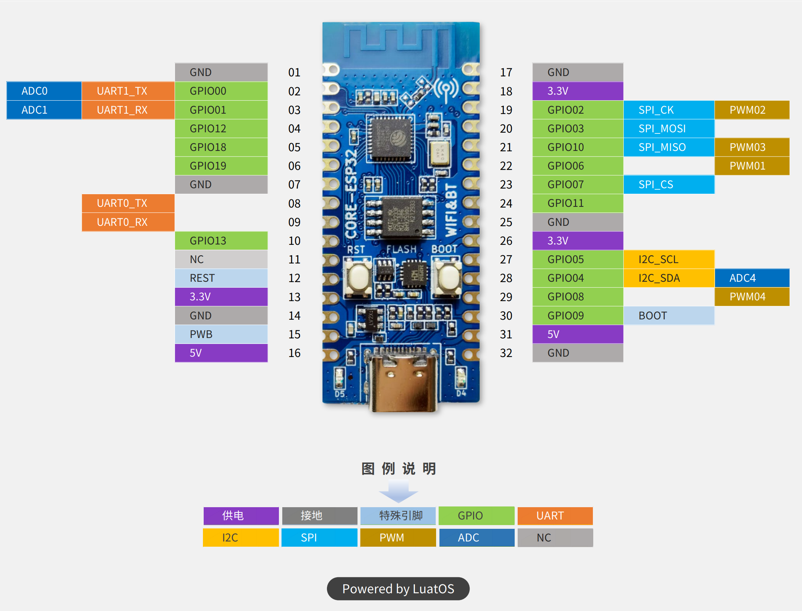
bsp/ESP32_C3/images/hx_shang.png
0 → 100644
{kind=link}
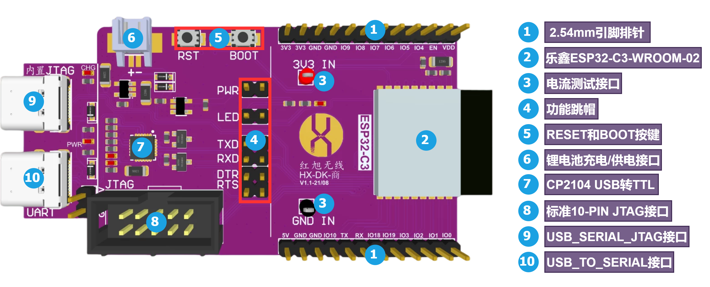
177.1 KB
{kind=link}
239.4 KB
bsp/ESP32_C3/main/CMakeLists.txt
0 → 100644
bsp/ESP32_C3/main/main.c
0 → 100644
bsp/ESP32_C3/rtconfig.h
0 → 100644
bsp/ESP32_C3/sdkconfig
0 → 100644
此差异已折叠。