Merge pull request #5182 from NU-LL/tkm32f499
Showing
bsp/tkm32F499/Kconfig
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
bsp/tkm32F499/README.md
0 → 100644
此差异已折叠。
bsp/tkm32F499/SConscript
0 → 100644
bsp/tkm32F499/SConstruct
0 → 100644
此差异已折叠。
此差异已折叠。
bsp/tkm32F499/applications/main.c
0 → 100644
此差异已折叠。
bsp/tkm32F499/drivers/Kconfig
0 → 100644
此差异已折叠。
bsp/tkm32F499/drivers/SConscript
0 → 100644
此差异已折叠。
bsp/tkm32F499/drivers/board.c
0 → 100644
此差异已折叠。
bsp/tkm32F499/drivers/board.h
0 → 100644
此差异已折叠。
bsp/tkm32F499/drivers/drv_gpio.c
0 → 100644
此差异已折叠。
bsp/tkm32F499/drivers/drv_gpio.h
0 → 100644
此差异已折叠。
bsp/tkm32F499/drivers/drv_lcd.c
0 → 100644
此差异已折叠。
bsp/tkm32F499/drivers/drv_log.h
0 → 100644
此差异已折叠。
bsp/tkm32F499/drivers/drv_uart.c
0 → 100644
此差异已折叠。
bsp/tkm32F499/drivers/drv_uart.h
0 → 100644
此差异已折叠。
bsp/tkm32F499/drivers/lcd/lcd.c
0 → 100644
此差异已折叠。
bsp/tkm32F499/drivers/lcd/lcd.h
0 → 100644
此差异已折叠。
bsp/tkm32F499/drivers/lcd_port.h
0 → 100644
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
bsp/tkm32F499/figures/board.jpg
0 → 100644
{kind=link}
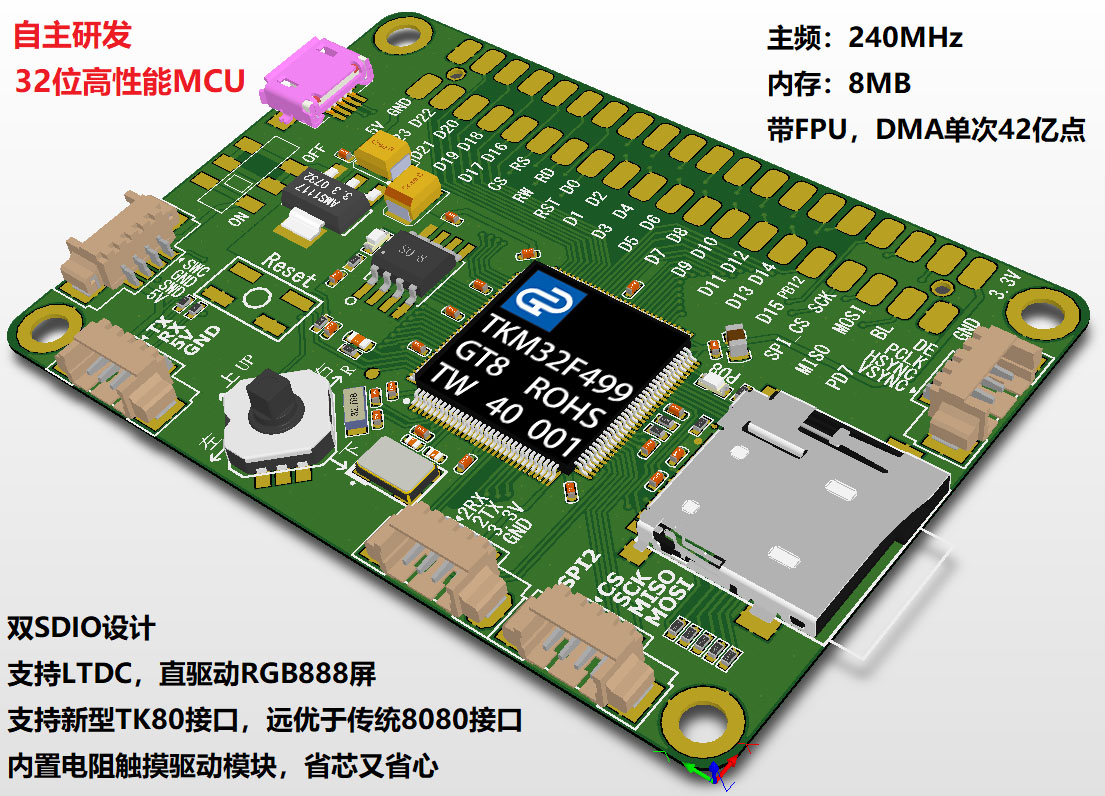
314.9 KB
bsp/tkm32F499/flash_download.exe
0 → 100644
此差异已折叠。
bsp/tkm32F499/project.uvprojx
0 → 100644
此差异已折叠。
bsp/tkm32F499/rtconfig.h
0 → 100644
此差异已折叠。
bsp/tkm32F499/rtconfig.py
0 → 100644
此差异已折叠。
bsp/tkm32F499/template.uvprojx
0 → 100644
此差异已折叠。