[add] 添加 PWM 驱动
[fix] 修复scons脚本中错误的依赖宏
Showing
{kind=link}
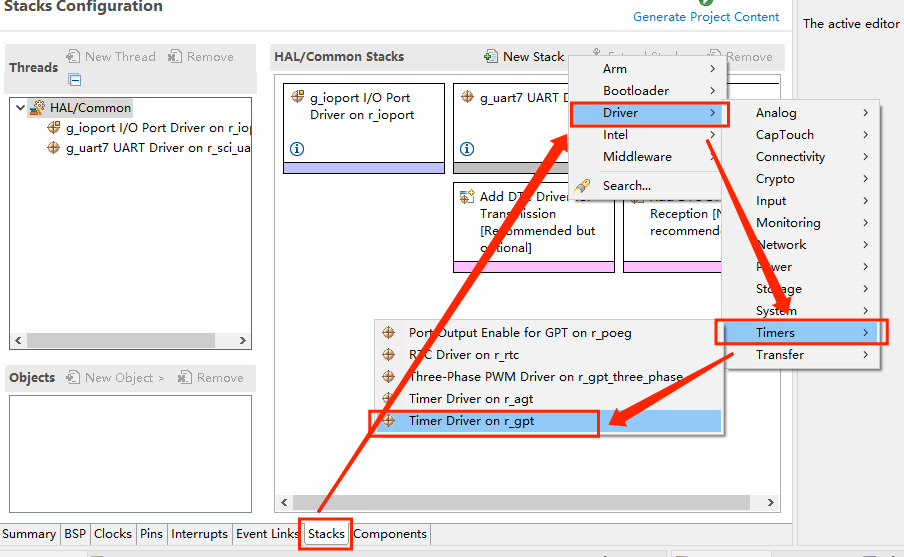
58.2 KB
{kind=link}
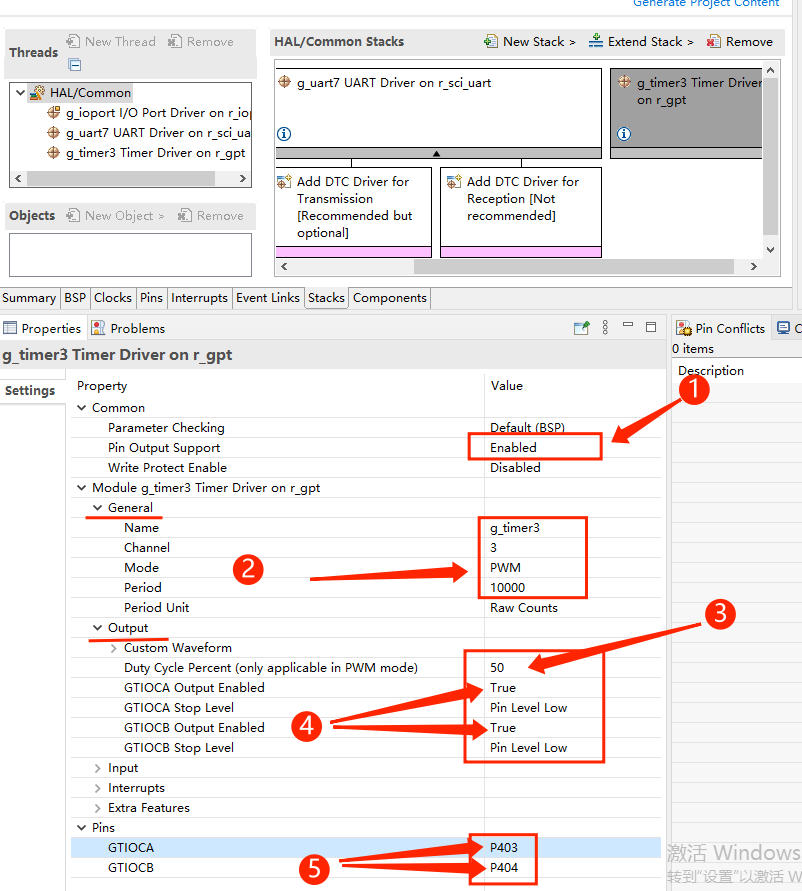
78.7 KB
{kind=link}
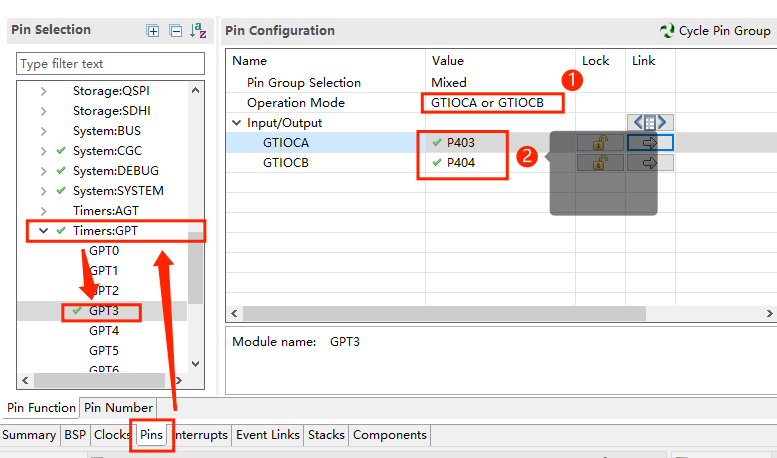
35.7 KB
bsp/ra6m4-cpk/drivers/drv_pwm.c
0 → 100644
bsp/ra6m4-cpk/drivers/drv_pwm.h
0 → 100644
[fix] 修复scons脚本中错误的依赖宏
58.2 KB
78.7 KB
35.7 KB