[rtduino]重新整理pinout (#6445)
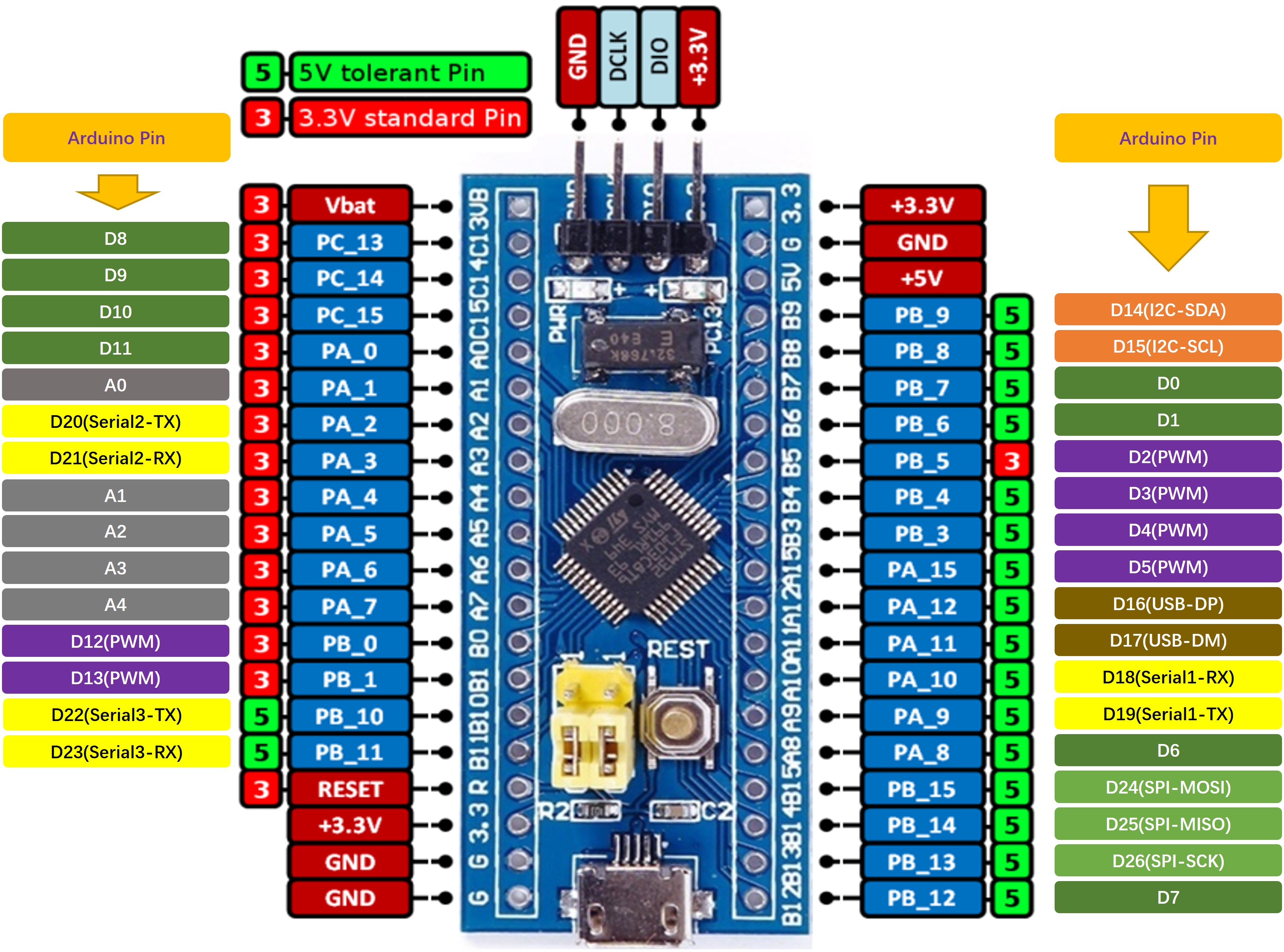
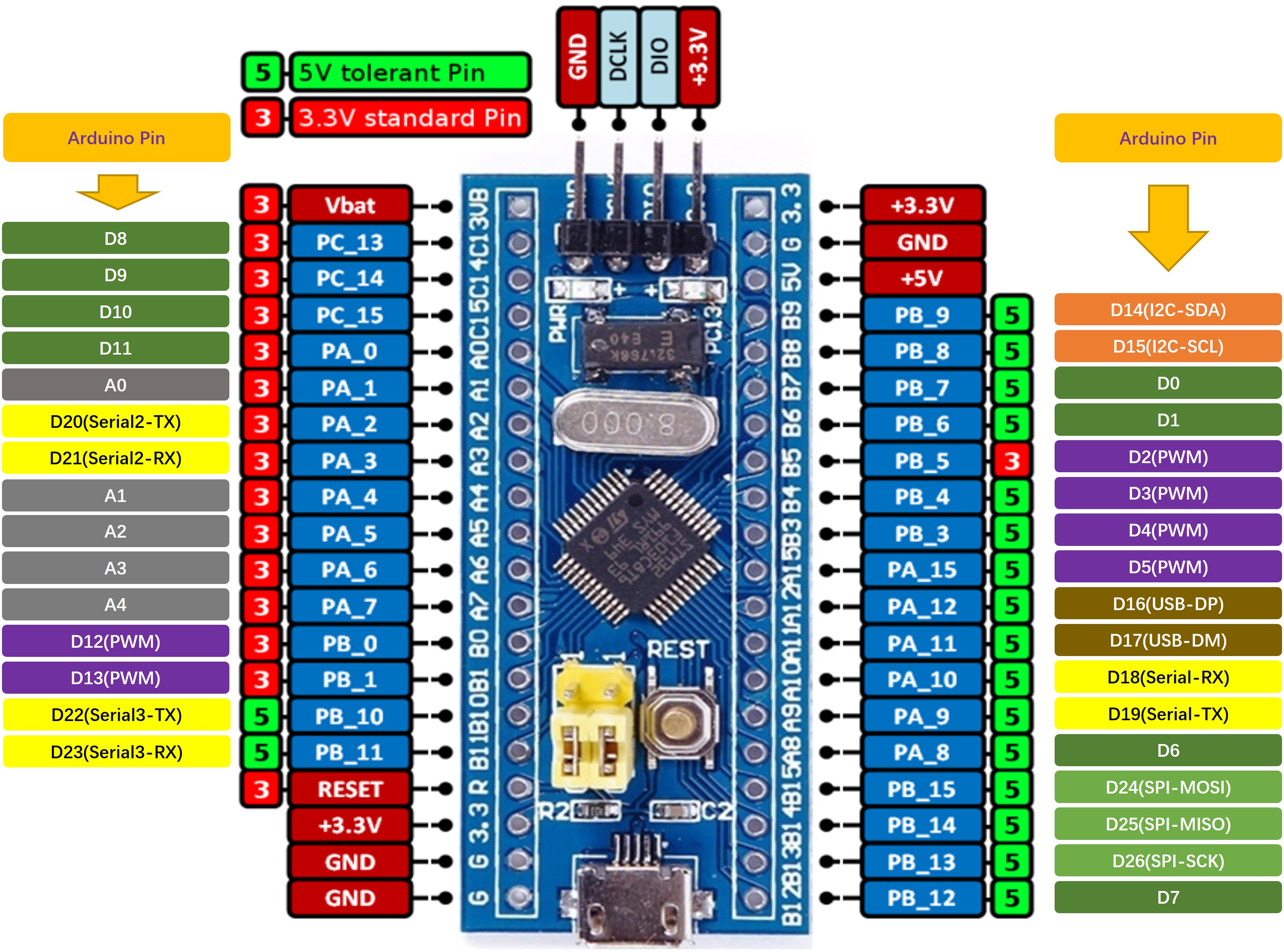
* [rtduino][stm32l475-pandora] 重新整理pinout * [rtduino][bluepill] 整理pinout * [rtduino][stm32-f401nucleo]整理pinout * [rtduino][stm32-pandora] 整理pinout * [rtduino][stm32f072]整理pinout
Showing
{kind=link}
{kind=link}
| W: | H:
| W: | H:
* [rtduino][stm32l475-pandora] 重新整理pinout * [rtduino][bluepill] 整理pinout * [rtduino][stm32-f401nucleo]整理pinout * [rtduino][stm32-pandora] 整理pinout * [rtduino][stm32f072]整理pinout
| W: | H:
| W: | H: