Microchip SAM MCU新增ethernet支持和驱动更新 (#5821)
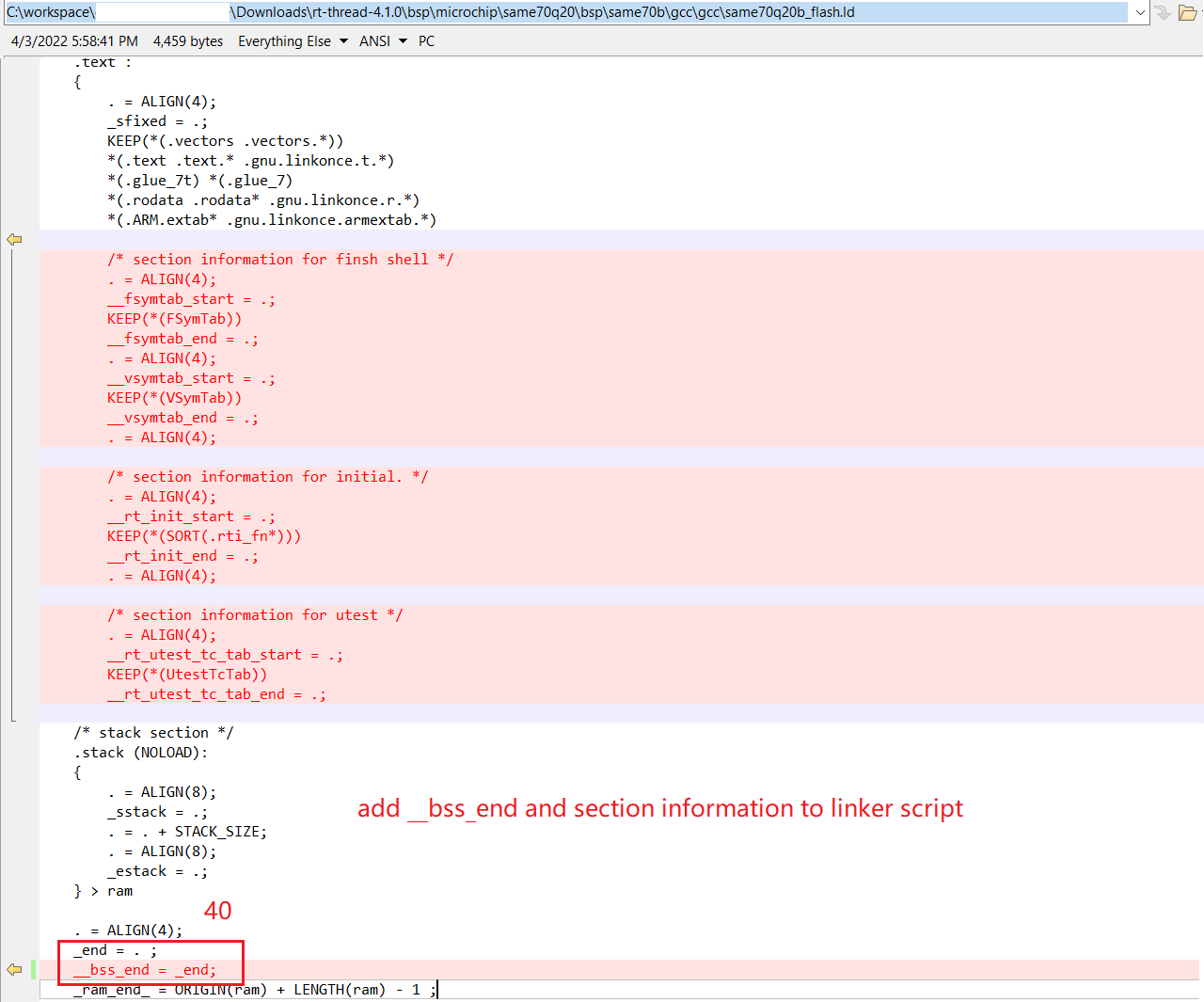
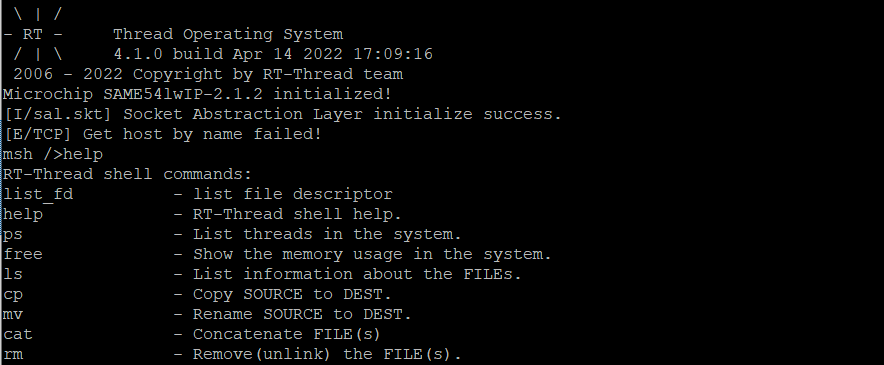
* Microchip SAM MCU BSP update and add ethernet driver 1. Update Microchip SAM MCU BSP, add I2C, GMAC, ADC driver support. 2. Add ethernet driver support of SAM MCU for RT-Thread. * Add GMAC and I2C driver support 1. Update MCU BSP to support I2C/ADC/GMAC peripherals. 2. Add I2C and ethernet driver and LWIP support. 3. Update serial driver. * Add I2C driver and move some files to the common folder 1. Add I2C driver. 2. Move the same drivers and demo code to same folder to reduce duplicated code.
Showing
文件已移动
{kind=link}
299.4 KB
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}
21.4 KB
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。
此差异已折叠。