Fork自 RT-Thread / rt-thread
体验新版 GitCode,发现更多精彩内容 >>
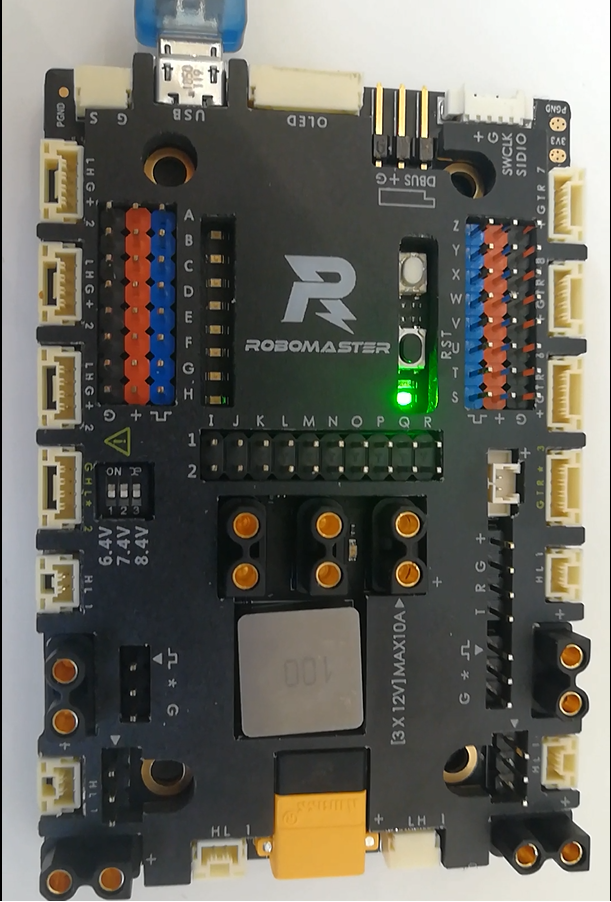
更改stm32f427-robomaster-a板BSP包board.png图片
287.2 KB | W: | H:
695.3 KB | W: | H:
{kind=link}
{kind=link}