Merge pull request #309 from littletomatodonkey/cpp_infer
add cpp inference
Showing
deploy/cpp_infer/CMakeLists.txt
0 → 100644
deploy/cpp_infer/include/config.h
0 → 100644
deploy/cpp_infer/readme.md
0 → 100644
deploy/cpp_infer/src/clipper.cpp
0 → 100644
此差异已折叠。
deploy/cpp_infer/src/config.cpp
0 → 100644
deploy/cpp_infer/src/main.cpp
0 → 100644
deploy/cpp_infer/src/ocr_det.cpp
0 → 100644
deploy/cpp_infer/src/ocr_rec.cpp
0 → 100644
deploy/cpp_infer/src/utility.cpp
0 → 100644
deploy/cpp_infer/tools/build.sh
0 → 100755
deploy/cpp_infer/tools/config.txt
0 → 100644
deploy/cpp_infer/tools/run.sh
0 → 100755
deploy/imgs/cpp_infer_pred_12.png
0 → 100644
{kind=link}
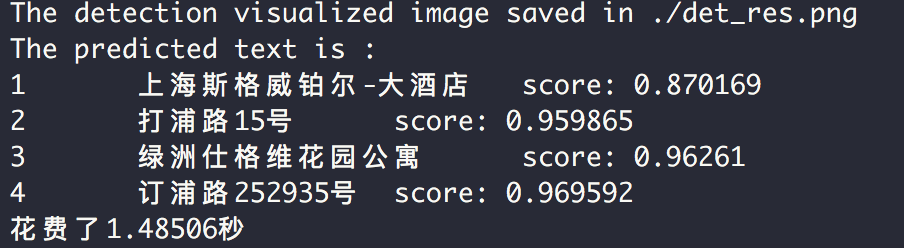
78.4 KB