Docs: Planning Readme + Open Space Planner doc
Showing
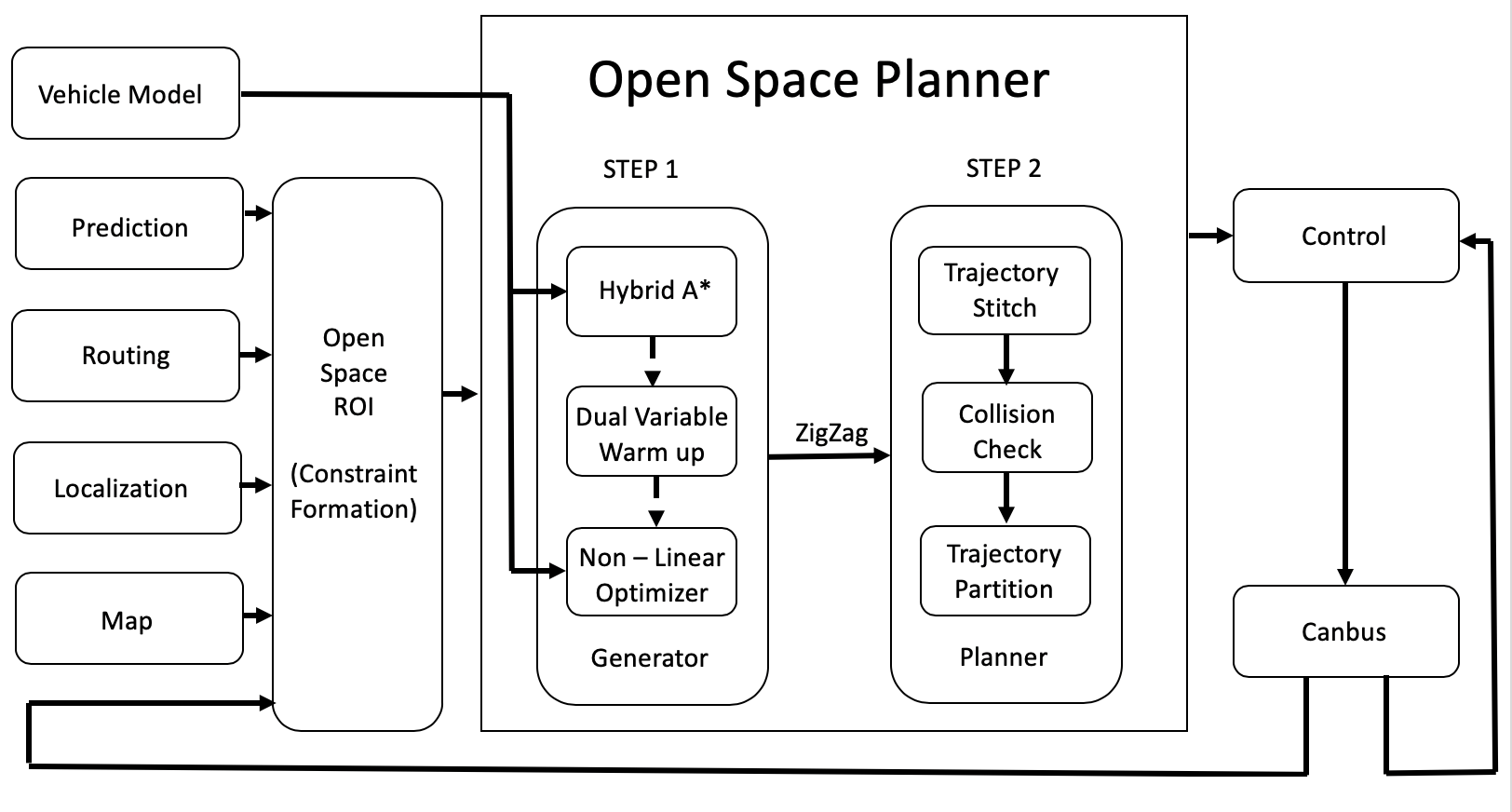
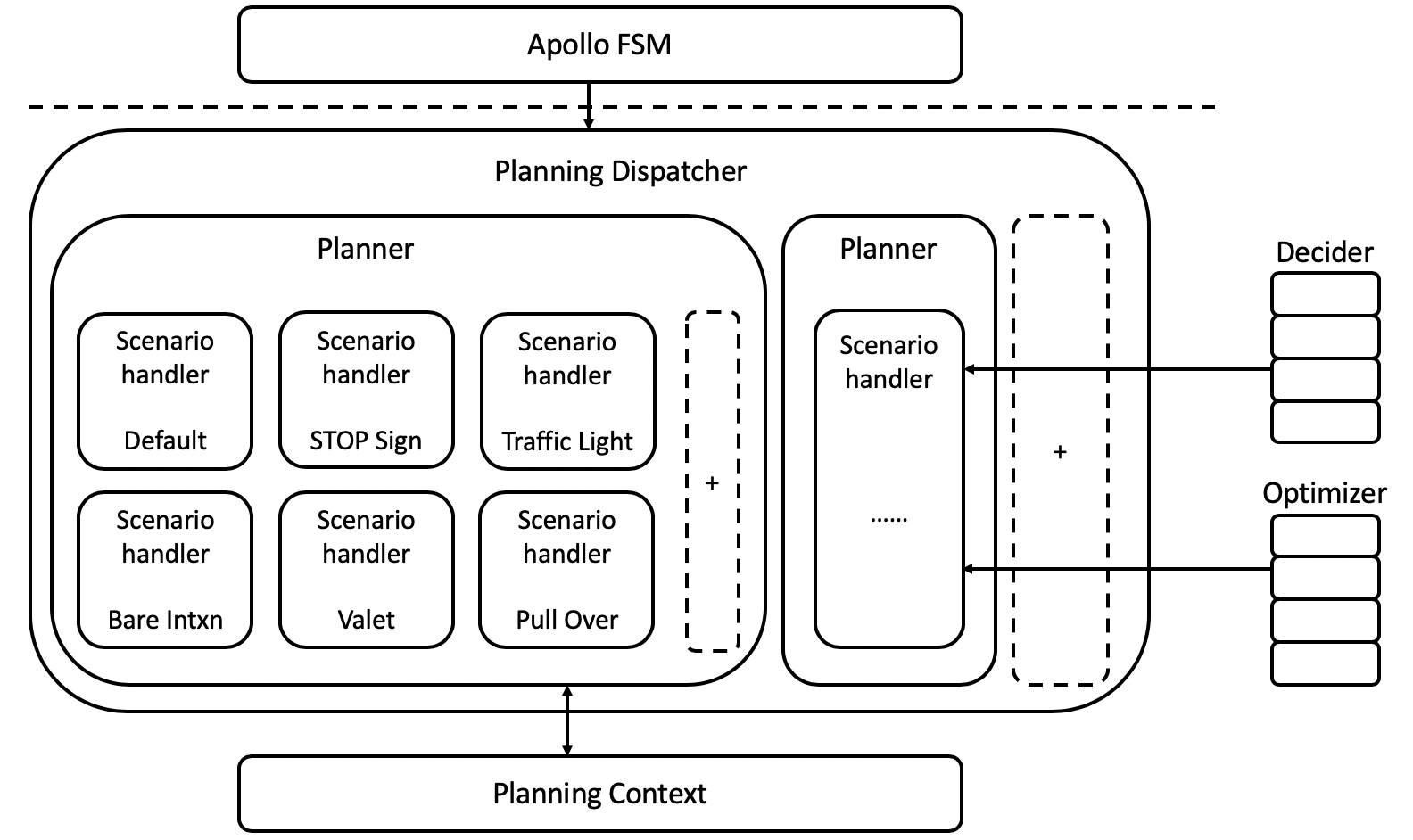
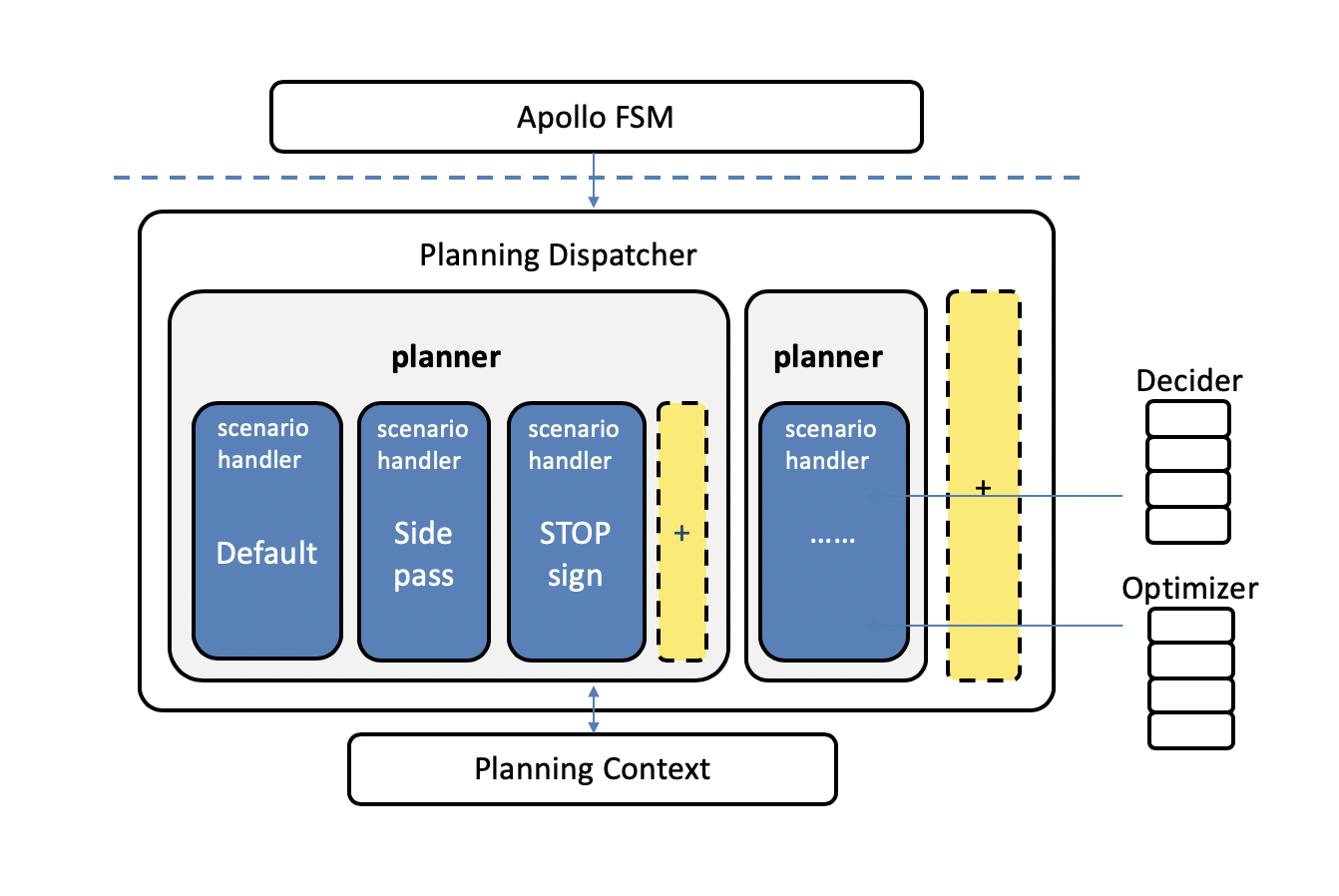
docs/specs/images/os_planner.png
0 → 100644
{kind=link}
233.3 KB
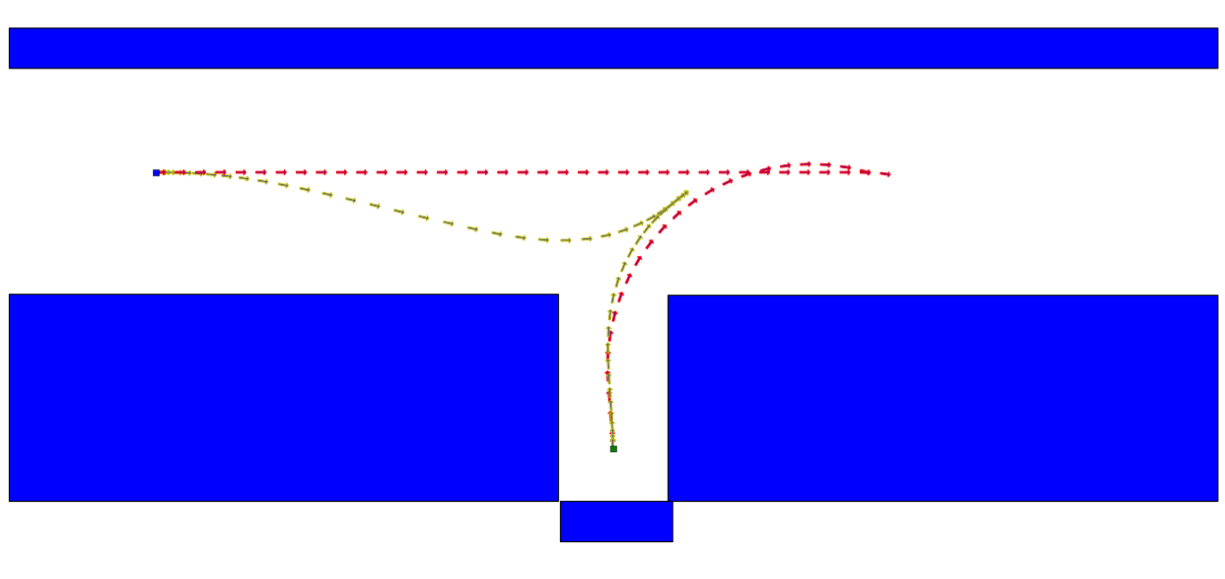
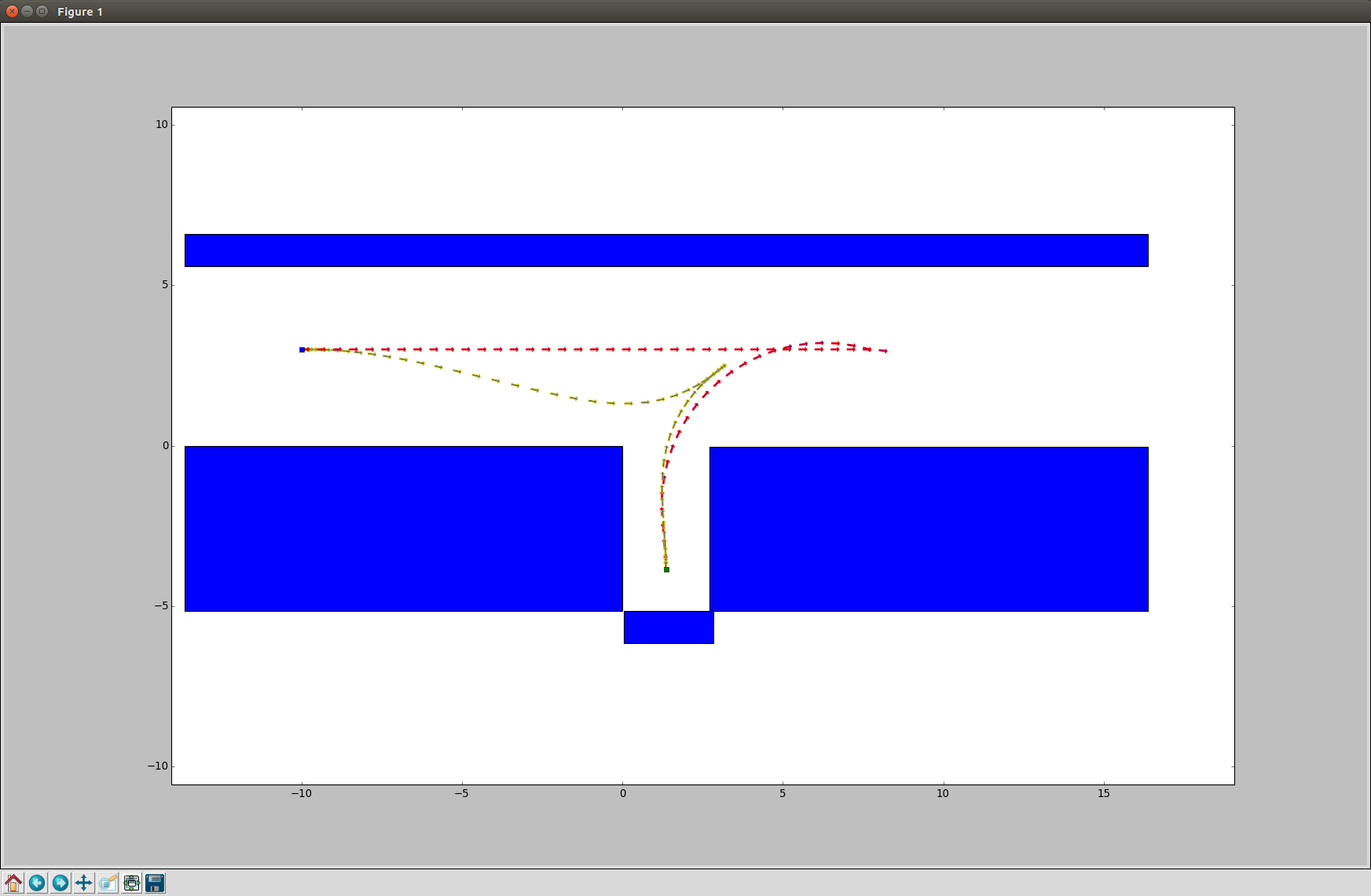
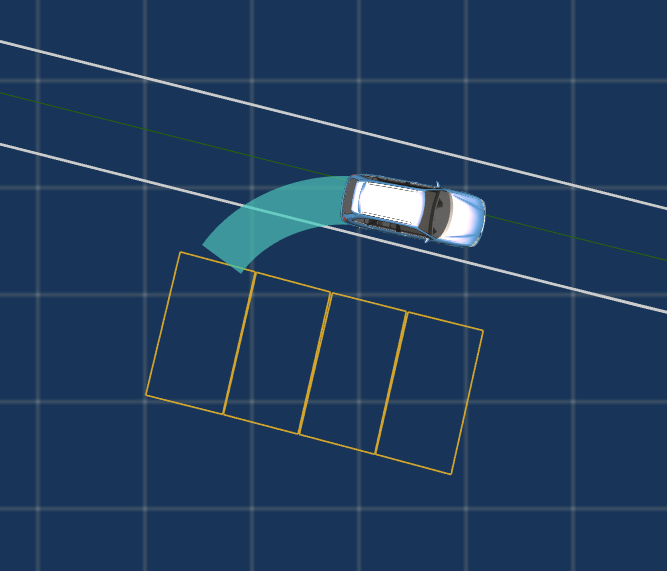
docs/specs/images/os_step1.png
0 → 100644
{kind=link}
44.4 KB
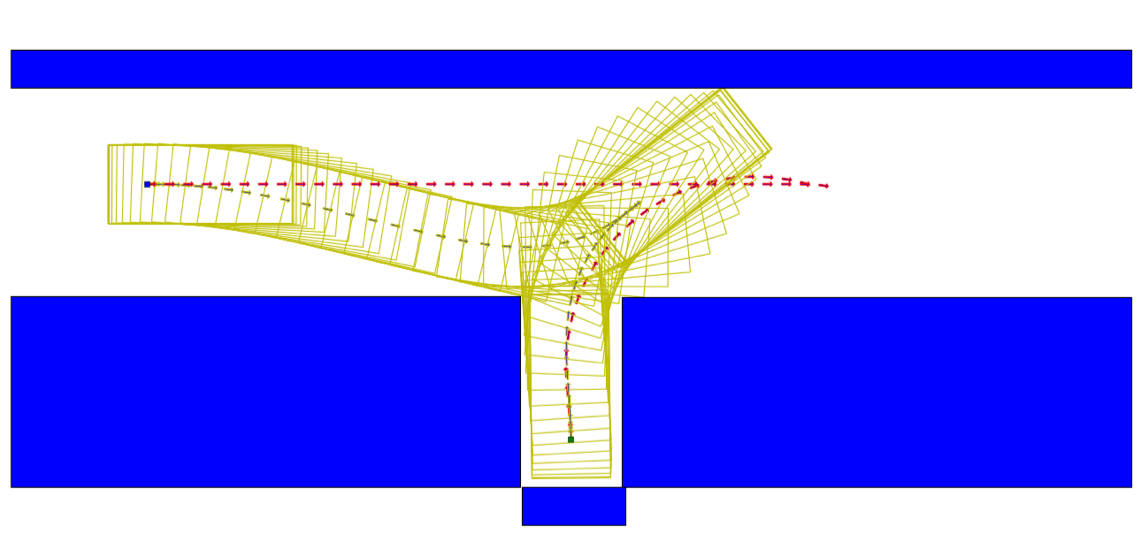
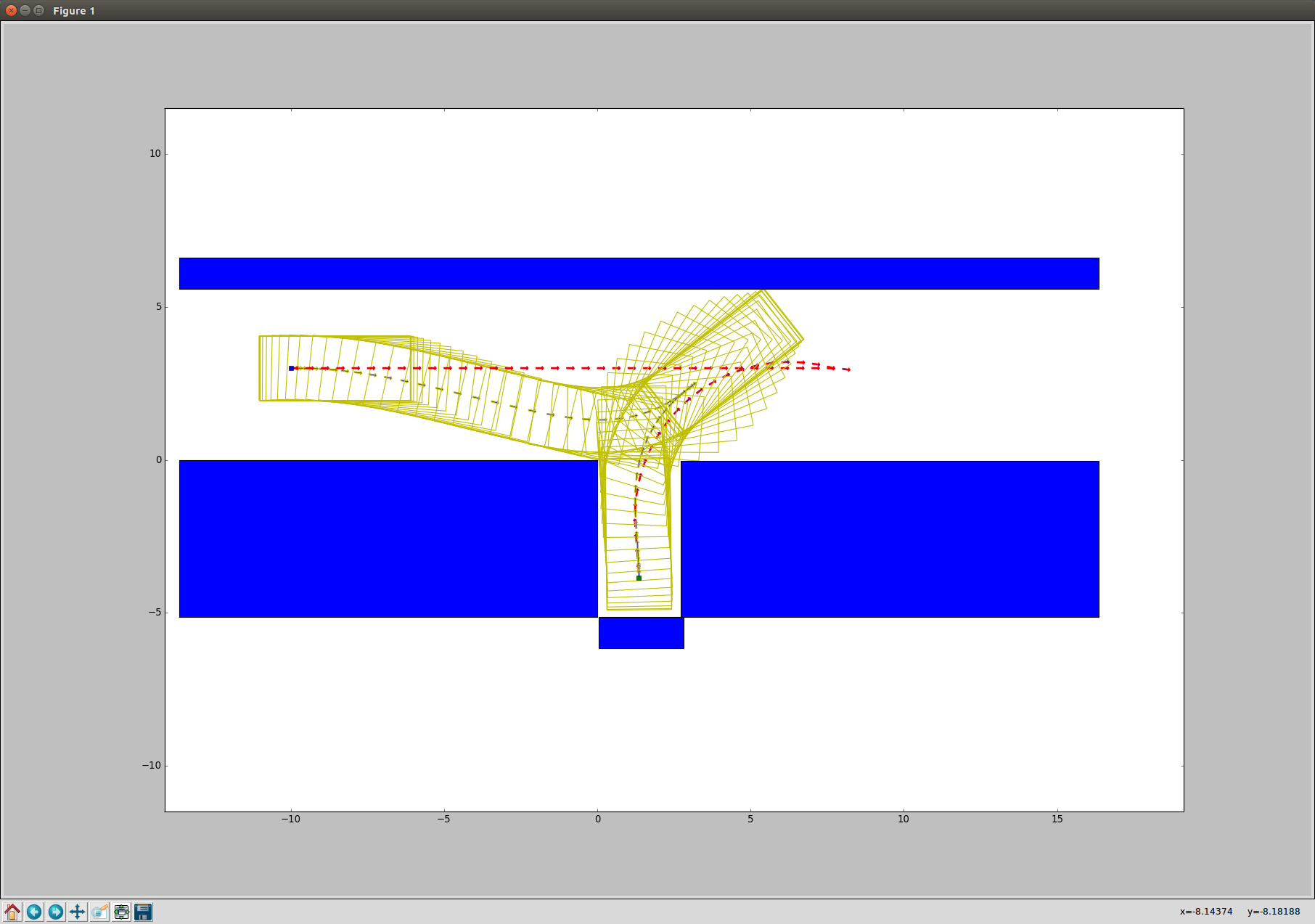
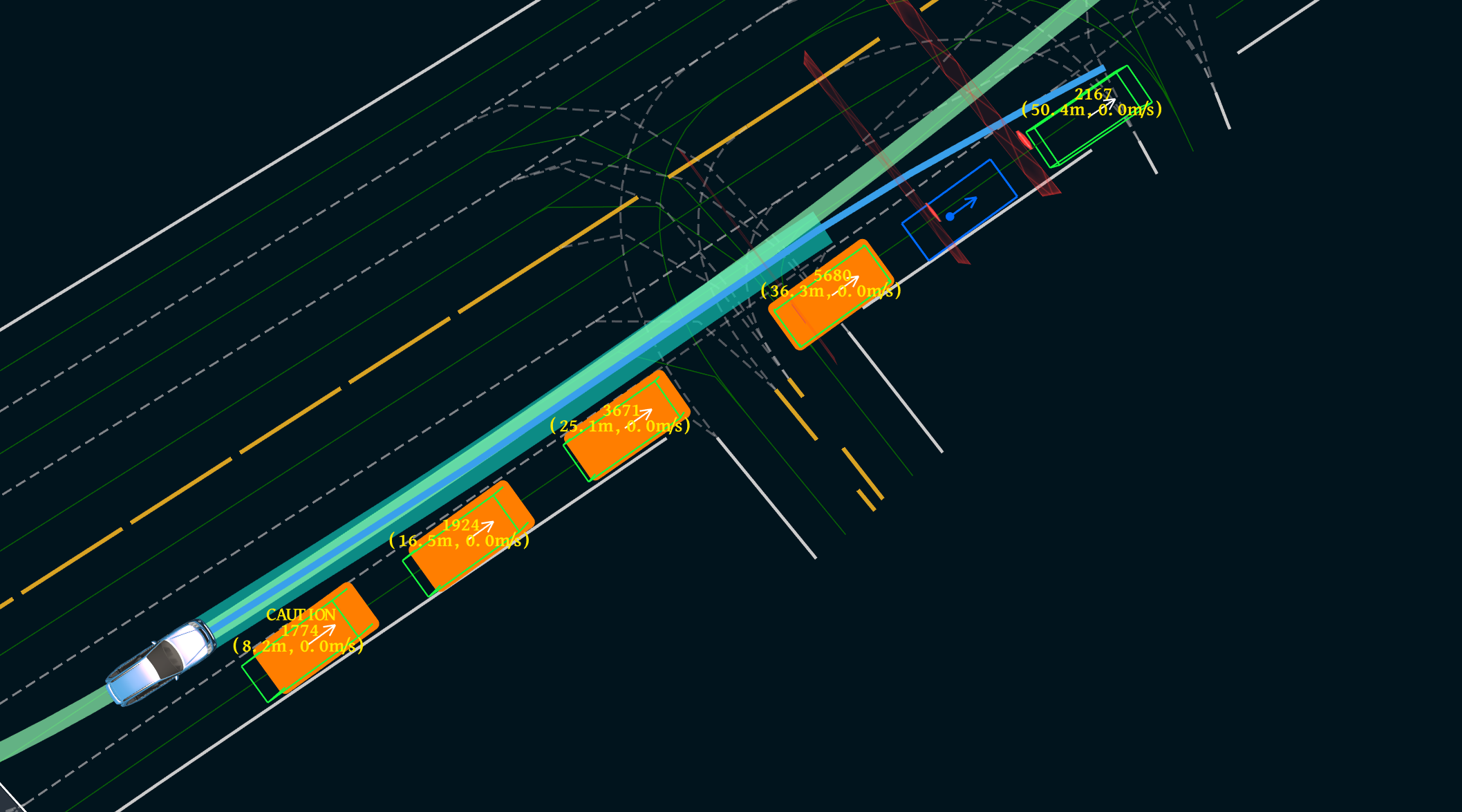
docs/specs/images/os_step2.png
0 → 100644
{kind=link}
160.5 KB
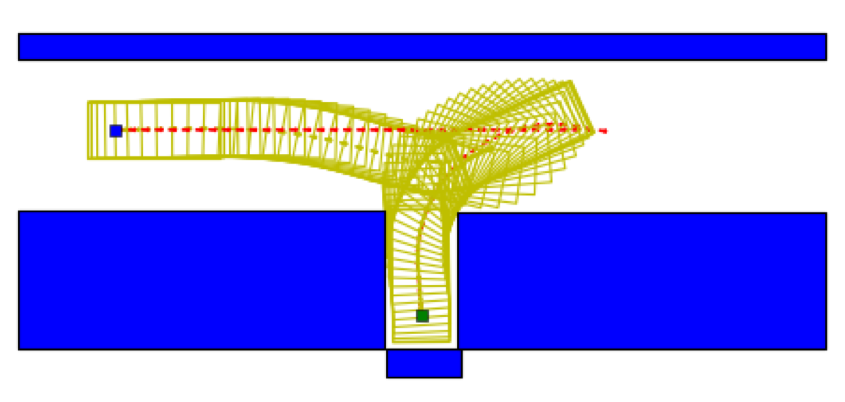
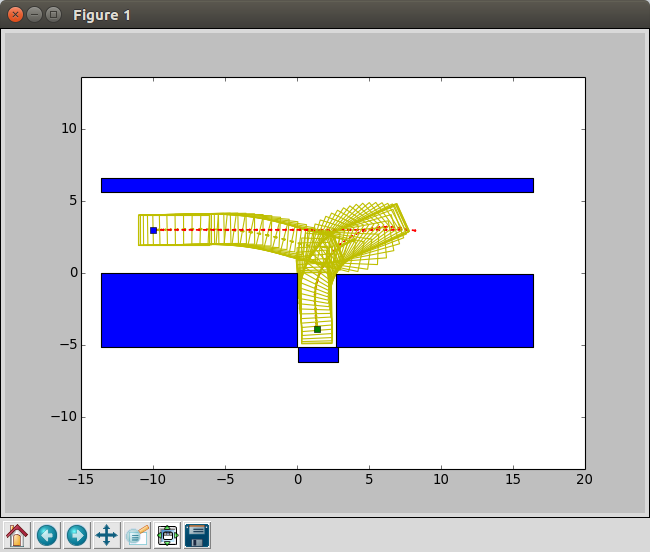
docs/specs/images/os_step3.png
0 → 100644
{kind=link}
100.4 KB
docs/specs/images/step1.png
已删除
100644 → 0
{kind=link}
45.3 KB
docs/specs/images/step2.png
已删除
100644 → 0
{kind=link}
180.4 KB
docs/specs/images/step3.png
已删除
100644 → 0
{kind=link}
47.5 KB
{kind=link}
388.4 KB
{kind=link}
426.1 KB
{kind=link}
51.1 KB
{kind=link}
254.8 KB
{kind=link}
276.6 KB
{kind=link}
55.1 KB
{kind=link}
136.8 KB
{kind=link}
37.1 KB