The cameras used are LI-USB30-AR023ZWDR with standard USB 3.0 case manufactured by Leopard Imaging Inc. We recommend using two cameras with 6 mm and 25 mm lens respectively to achieve the required performance.
...
...
@@ -449,7 +482,7 @@ If have modified the kernel, or the pre-built kernel is not the best for your pl
### Installing the Light Detection and Ranging System (LiDAR)
This section provides general information about installing **one** of two choices:
-**Option 1:** LiDAR: **Velodyne HDL-64E S3**
-**Option 2:** LiDAR: **Hesai Pandora**
### Installing the Light Detection and Ranging System (LiDAR)
#### Option 1: Installing Velodyne HDL-64E S3
This section provides descriptions on the installation procedure of HDL-64E S3 LiDAR
#### Mounting
##### Mounting
A customized mounting structure is required to successfully mount an HDL64E S3 LiDAR on top of a vehicle. This structure must provide rigid support to the LiDAR system while raising the LiDAR to a certain height above the ground. This height avoids the laser beams from the LiDAR being blocked by the front and/or rear of the vehicle. The actual height needed for the LiDAR depends on the design of the vehicle and the mounting point of the LiDAR relative to the vehicle. The vertical tilt angle of the lasers normally ranges from +2~-24.8 degrees relative to the horizon. To fully use the angle range for detection, on a Lincoln MKZ, it is recommended that you mount the LiDAR at a minimum height of 1.8 meters (from ground to the base of the LiDAR).
#### Wiring
##### Wiring
Each HDL-64E S3 LiDAR includes a cable bundle to connect the LiDAR to the power supply, the computer (Ethernet for data transfer, and serial port for LiDAR configuration) and the GPS timesync source.
Connect the power and signal cable to the matching ports on the LiDAR

1. Connection to the LiDAR
Connect the power and signal cable to the matching ports on the LiDAR

2. Connection to Power Source
...
...
@@ -665,7 +702,7 @@ Each HDL-64E S3 LiDAR includes a cable bundle to connect the LiDAR to the power
3. Conection to IPC
The connection to the IPC is through an ethernet cable. Plug the ethernet connector in the cable bundle into an ethernet port on the IPC
The connection to the IPC is through an ethernet cable. Plug the ethernet connector in the cable bundle into an ethernet port on the IPC.
4. Connection to GPS:
...
...
@@ -689,7 +726,7 @@ Each HDL-64E S3 LiDAR includes a cable bundle to connect the LiDAR to the power

#### Configuration
##### Configuration
By default, the HDL-64E S3 has the network IP address setting as 192.168.0.1. However, when you set up for Apollo, change the network IP address to 192.168.20.13 . You can use the terminal application with Termite3.2 and enter the network setting command. The IP address of the HDL-64E S3 can be configured using the following steps:
...
...
@@ -729,6 +766,59 @@ Each HDL-64E S3 LiDAR includes a cable bundle to connect the LiDAR to the power
This section provides descriptions on the installation procedure of Hesai Pandora
##### Mounting
A customized mounting structure is required to successfully mount an Hesai Pandora on top of a vehicle. This structure must provide rigid support to the LiDAR system while raising the LiDAR to a certain height above the ground. This height avoids the laser beams from the LiDAR being blocked by the front and/or rear of the vehicle. The actual height needed for the LiDAR depends on the design of the vehicle and the mounting point of the LiDAR relative to the vehicle. The vertical tilt angle of the lasers normally ranges from +7~-16 degrees relative to the horizon. To fully use the angle range for detection, on a Lincoln MKZ, it is recommended that you mount the LiDAR at a minimum height of 1.7 meters (from ground to the base of the LiDAR).
##### Wiring
Each Pandora includes a cable bundle to connect the LiDAR to the power supply, the computer (Ethernet for data transfer) and the GPS timesync source.

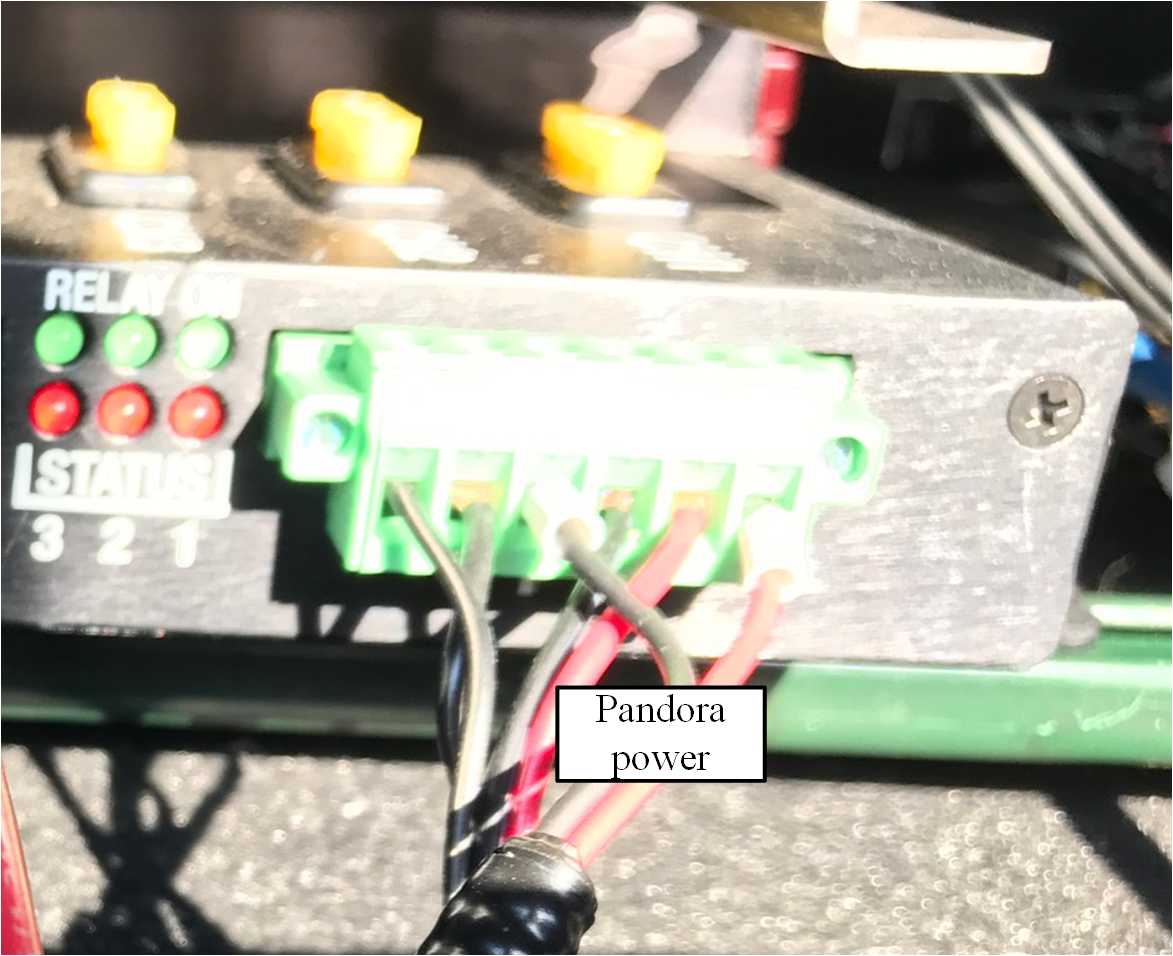
1. Connection to the Pandora
Connect the power and signal cable to the matching ports on the Pandora interface box.
The connection to the IPC is through an ethernet cable. Plug the ethernet connector in the cable bundle into an ethernet port on the IPC.
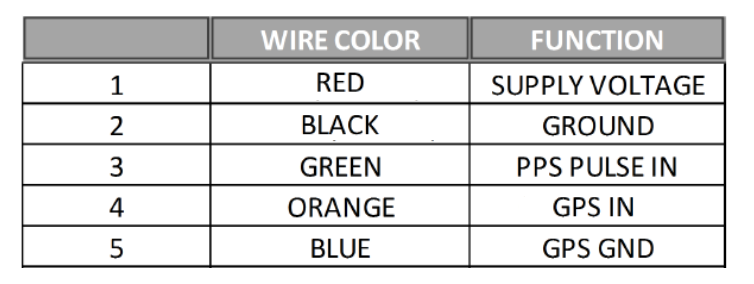
4. Connection to GPS:
The Pandora requires the Recommended minimum specific GPS/Transit data (GPRMC) and pulse per second (PPS)signal to synchronize to the GPS time. A customized connection is needed to establish the communication between the GPS receiver and the LiDAR:
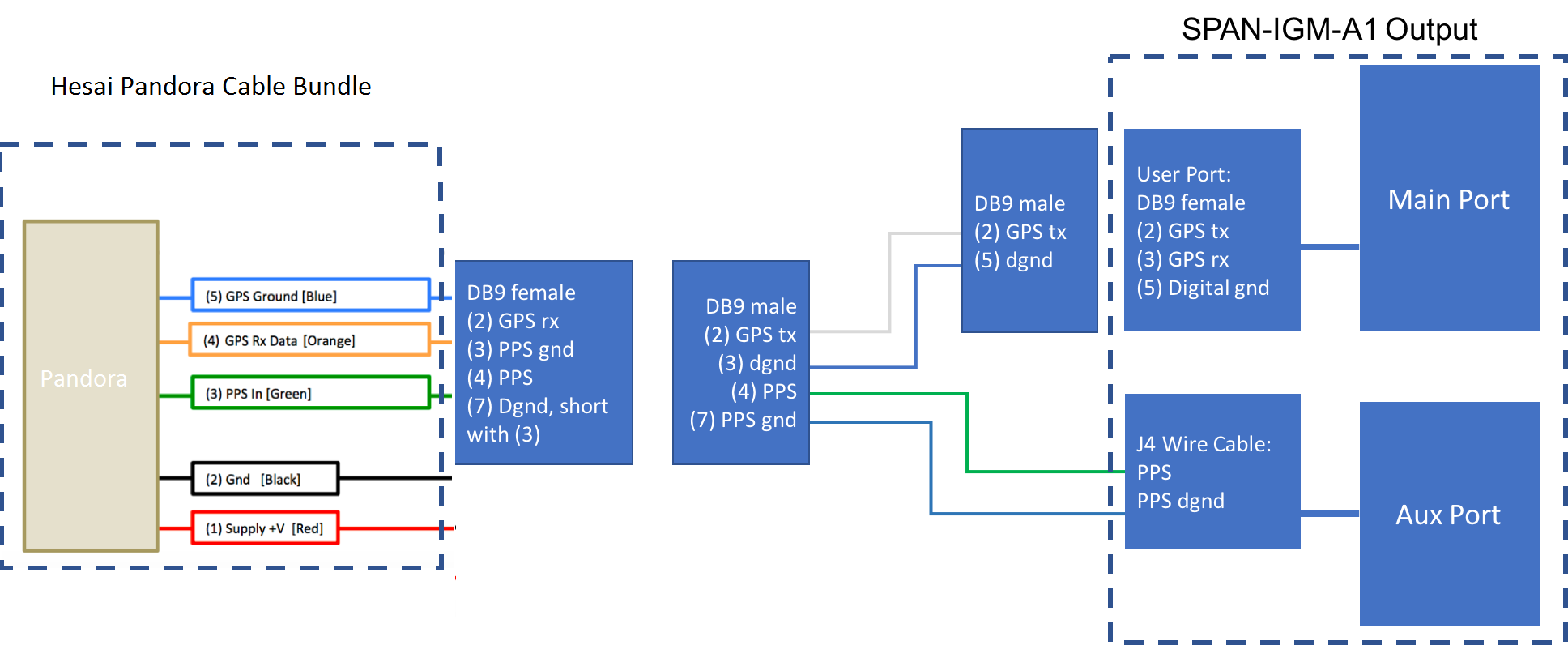
a. SPAN-IGM-A1
If you configured the SPAN-IGM-A1 as specified in [Configuring the GPS and IMU](#configuring-the-gps-and-imu), the GPRMC signal is sent from the GPS receiver via the User Port cable from the Main port. The PPS signal is sent through the wire cables labeled as “PPS” and “PPS dgnd” from the Aux port. The dash-line boxes in the figure below show the available connections that come with the Pandora and the SPAN-IGM-A1 GPS receiver. The remaining connections must be made by the user.
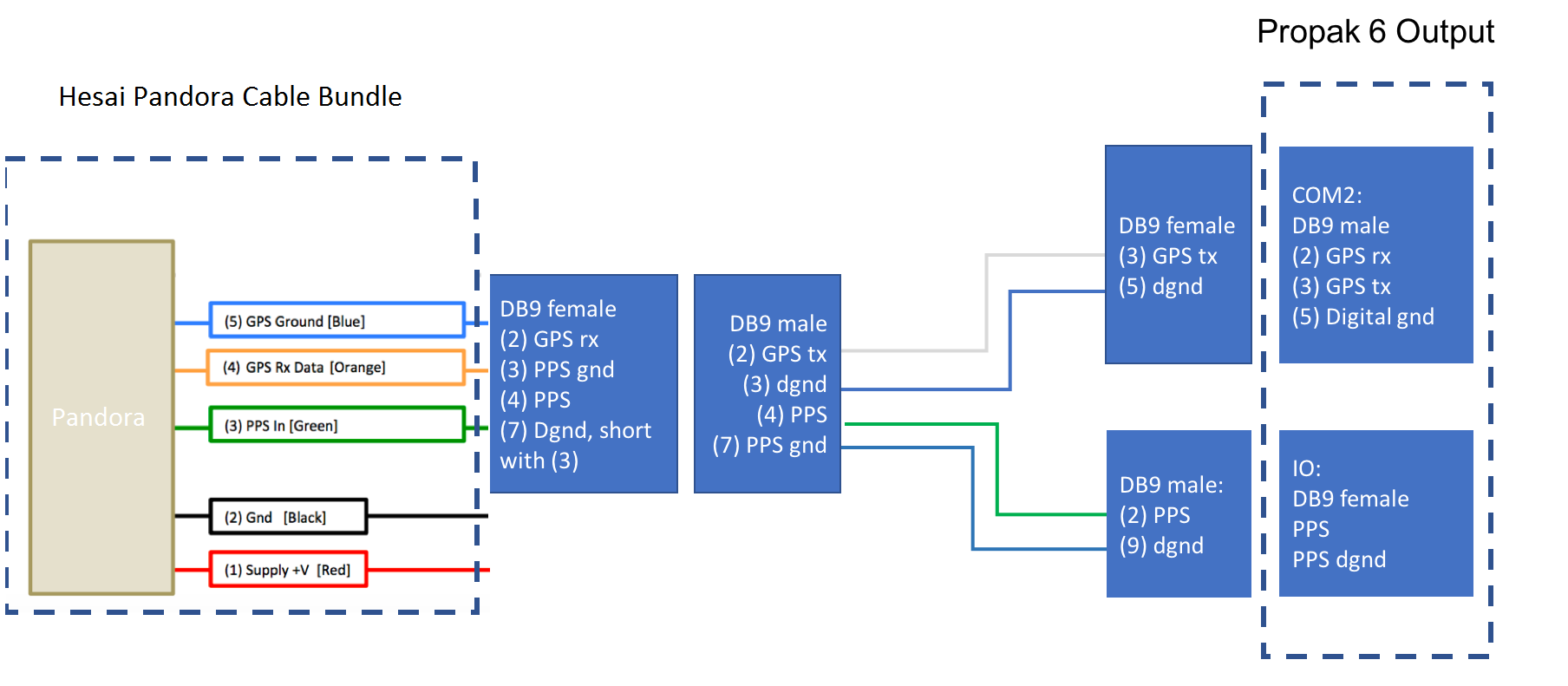
If you configured the Propak 6 as specified in [Configuring the GPS and IMU](#configuring-the-gps-and-imu), the GPRMC signal is sent from the GPS receiver via COM2 port. The PPS signal is sent through the IO port. The dash-line boxes in the figure below are available connections that comes with the Pandora and the Propak 6 GPS receiver. The remaining connections need to be made by the user.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

{kind=link}
