!58 Docs Update
* !1 modify * Description: update docs
Showing
contribute/faq-template.md
0 → 100644
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}
96.2 KB
{kind=link}
21.8 KB
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}
28.7 KB
{kind=link}
21.8 KB
{kind=link}
{kind=link}
| W: | H:
| W: | H:
{kind=link}

4.5 KB
{kind=link}

4.9 KB
{kind=link}
51.4 KB
{kind=link}
71.7 KB
{kind=link}
20.4 KB
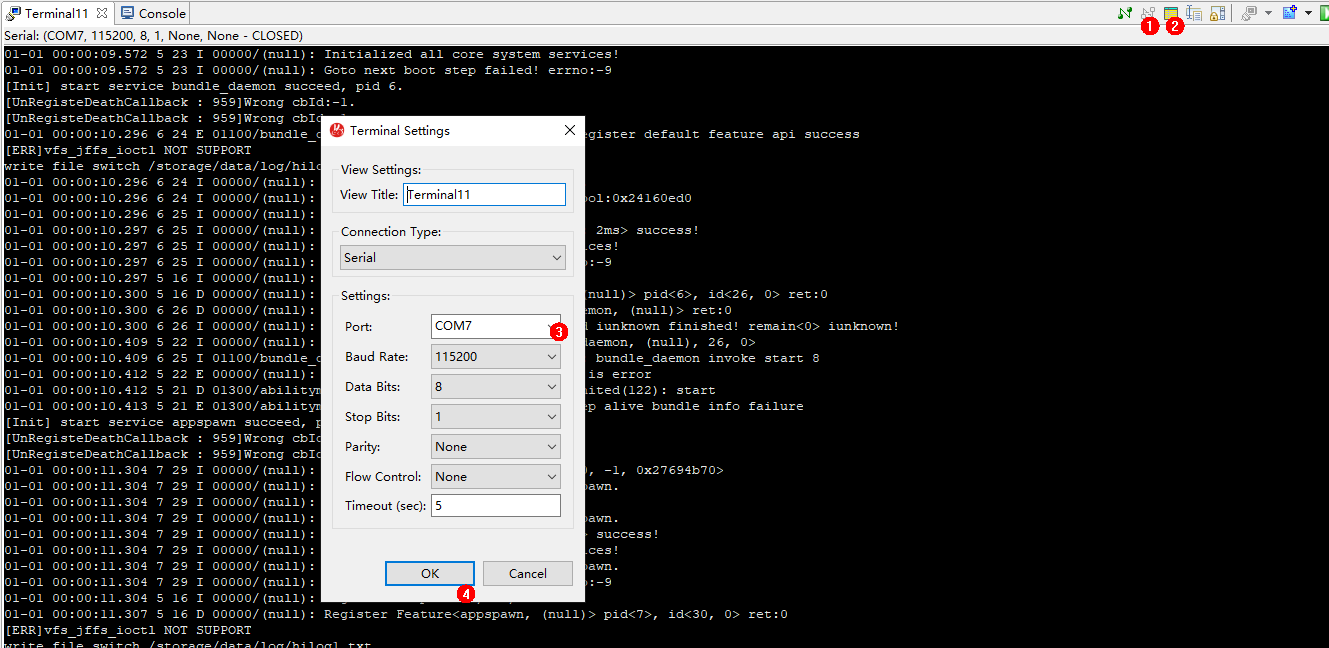
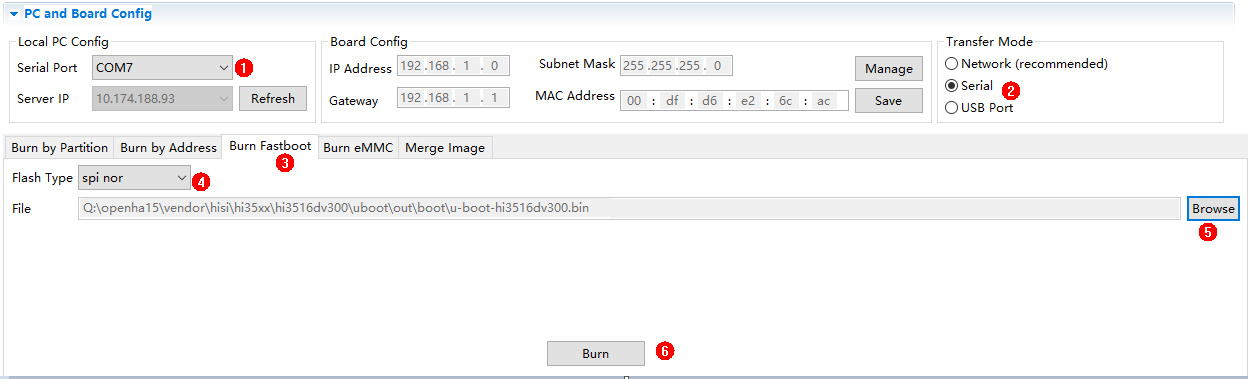
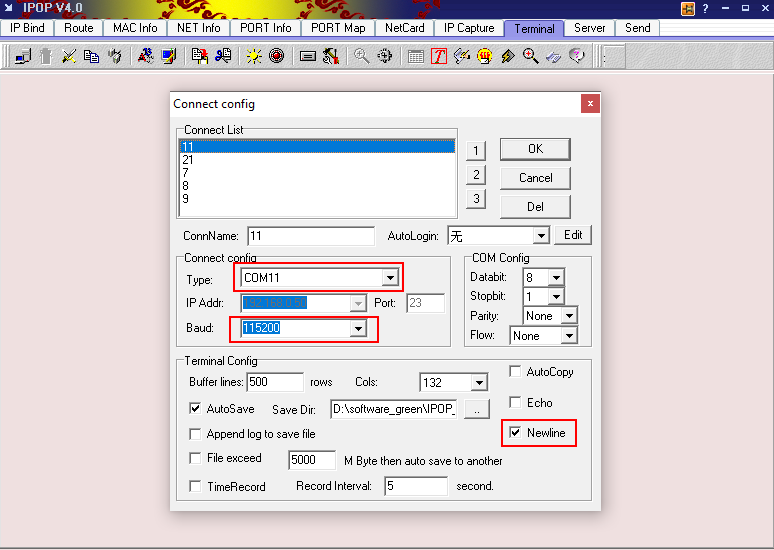
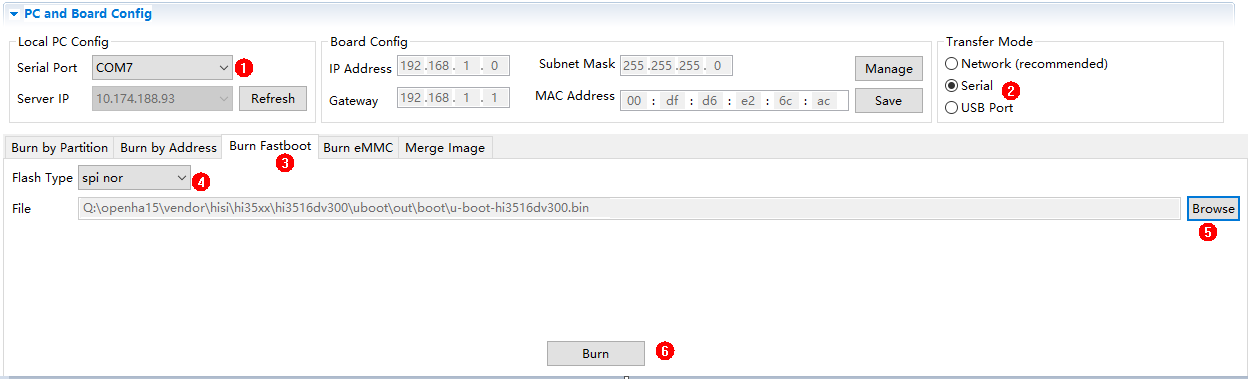
quick-start/figures/修改串口号图示-3.png
0 → 100644
{kind=link}
96.2 KB
{kind=link}
28.7 KB
quick-start/搭建环境.md
100755 → 100644
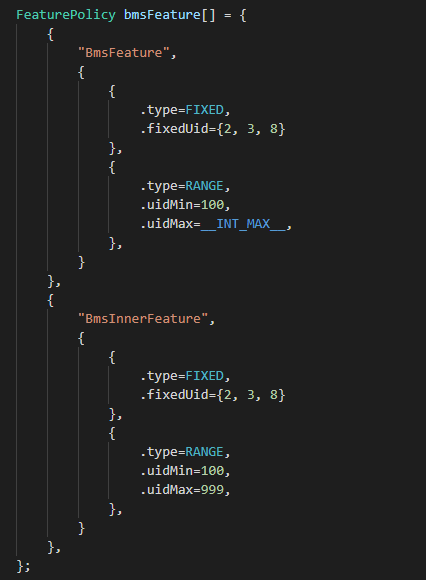
readme/figures/bms策略举例.png
0 → 100644
{kind=link}
12.3 KB
{kind=link}
34.1 KB
{kind=link}
65.1 KB
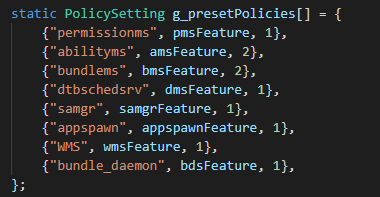
readme/figures/全局策略2.png
0 → 100644
{kind=link}
9.6 KB
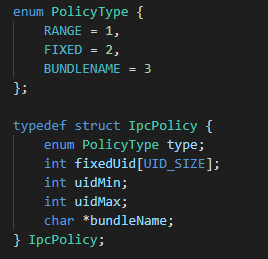
readme/figures/策略类型2.png
0 → 100644
{kind=link}
7.1 KB