## 1 RTduino - Arduino Ecosystem Compatibility Layer for RT-Thread
### 1.1 如何开启针对本BSP的Arduino生态兼容层
STM32 Blue Pill board has support [RTduino](https://github.com/RTduino/RTduino). Users can use Arduino APIs, third party libraries and programming method to program on Blue Pill board.
Env 工具下敲入 menuconfig 命令,或者 RT-Thread Studio IDE 下选择 RT-Thread Settings:
### 1.1 How to Enable RTduino
Please go to the [RTduino repository](https://github.com/RTduino/RTduino) to see the details.
> 1. If you drive the servo and call the analogWrite function at the same time, you need to select the PWM signal pins generated by different timers. Since the 4 channels of the STM32 timer need to maintain the same frequency, if the PWM generated by the same timer is used to drive the servo and analogWrite respectively , it may cause the servo to fail.
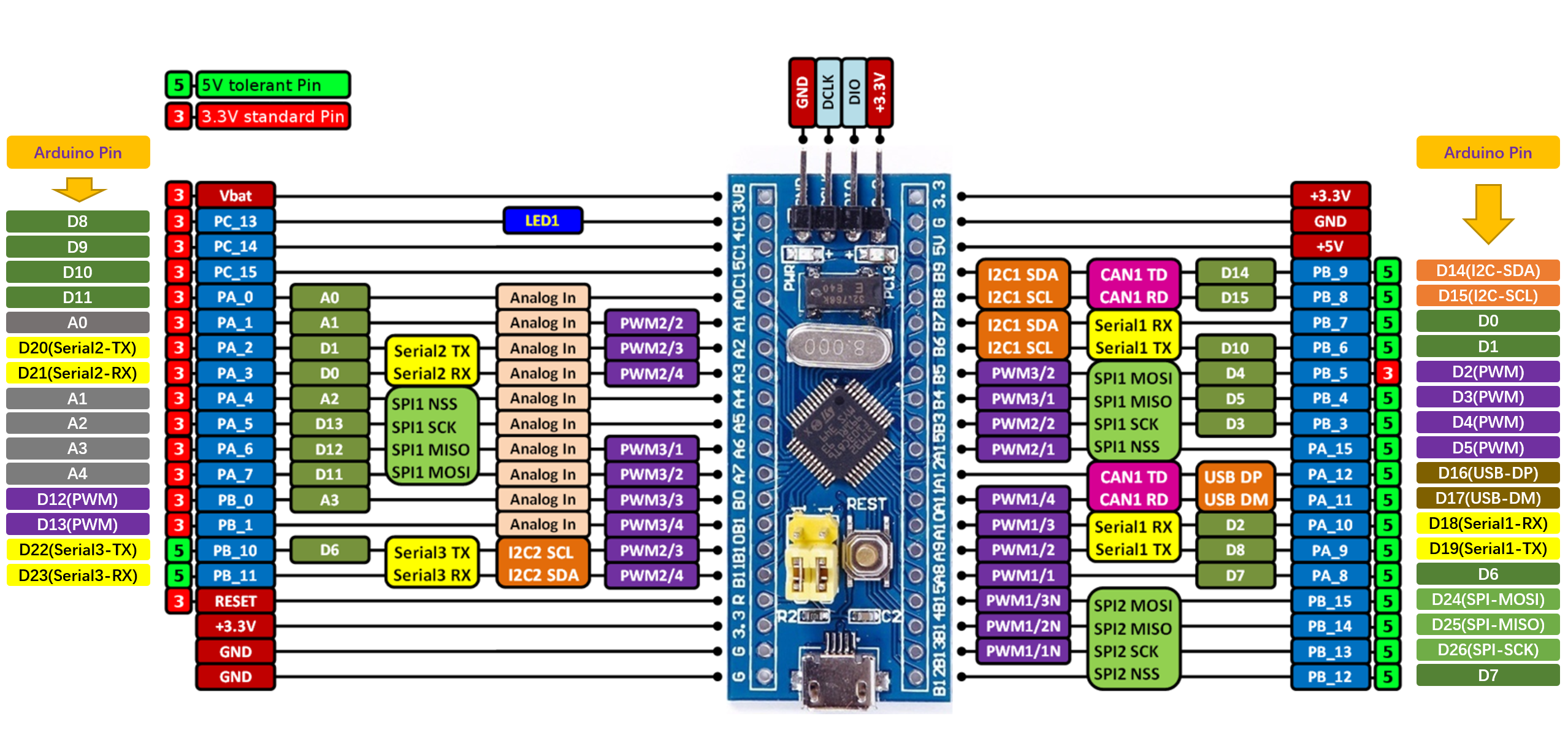
> 2. More information about Arduino pinout, please see [pins_arduino.c](pins_arduino.c) and [pins_arduino.h](pins_arduino.h)
## 3 Communication
### 3.1 I2C Bus
I2C bus is `D14` and `D15` pins. Users can directly include the `#include <Wire.h>`, which is the Arduino official I2C header file, to use the I2C bus.
### 3.2 SPI Bus
SPI bus is `D24`, `D25` and `D26` pins. Users can directly include the `#include <SPI.h>`, which is the Arduino official SPI header file, to use the SPI bus. In addition, chip select pin (SS) also is used, which is `D7` by default.
### 3.3 USB
This board supports USB virtual COM by default. See [example](https://github.com/RTduino/RTduino/tree/master/examples/USBSerial).
{kind=link}
{kind=link}