Update by following reviewers' comments.
Merge branch 'develop' of https://github.com/PaddlePaddle/Paddle into dropout.
Showing
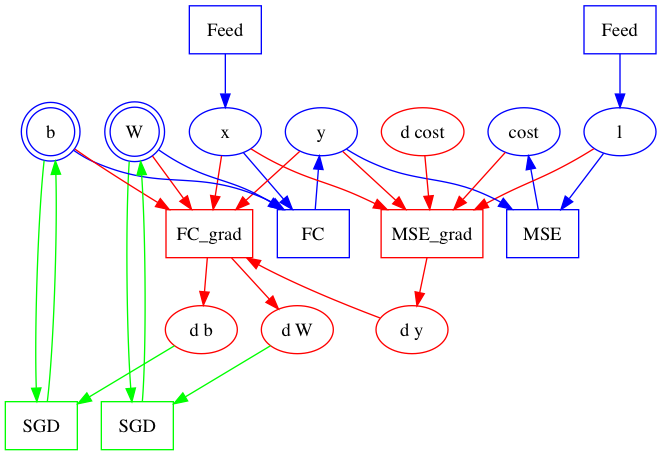
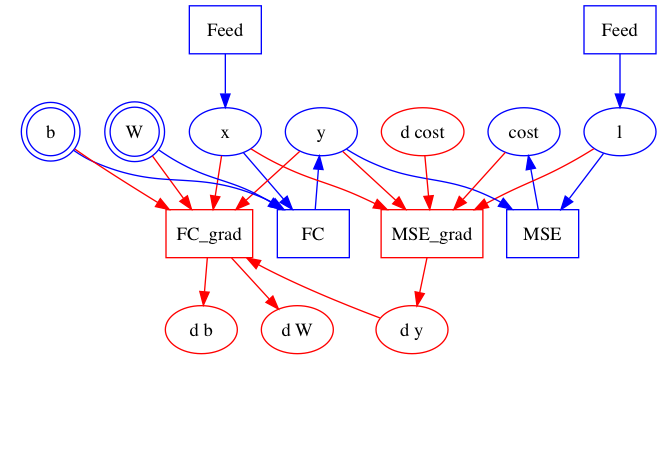
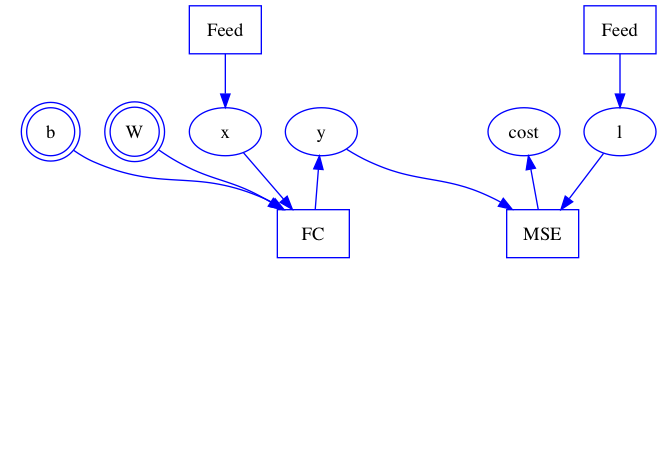
doc/design/graph.md
0 → 100644
doc/design/if_else_op.md
0 → 100644
{kind=link}
54.1 KB
{kind=link}
46.1 KB
{kind=link}
28.5 KB
doc/howto/dev/use_eigen_cn.md
0 → 100644
paddle/framework/lod_tensor.md
0 → 100644
paddle/operators/cos_sim_op.cc
0 → 100644
paddle/operators/cos_sim_op.h
0 → 100644
paddle/operators/identity_op.cc
0 → 100644
paddle/platform/cudnn_helper.h
0 → 100644
文件已移动