Merge pull request #283 from LDOUBLEV/fixocr
add deploy lite demo
Showing
.clang_format.hook
0 → 100644
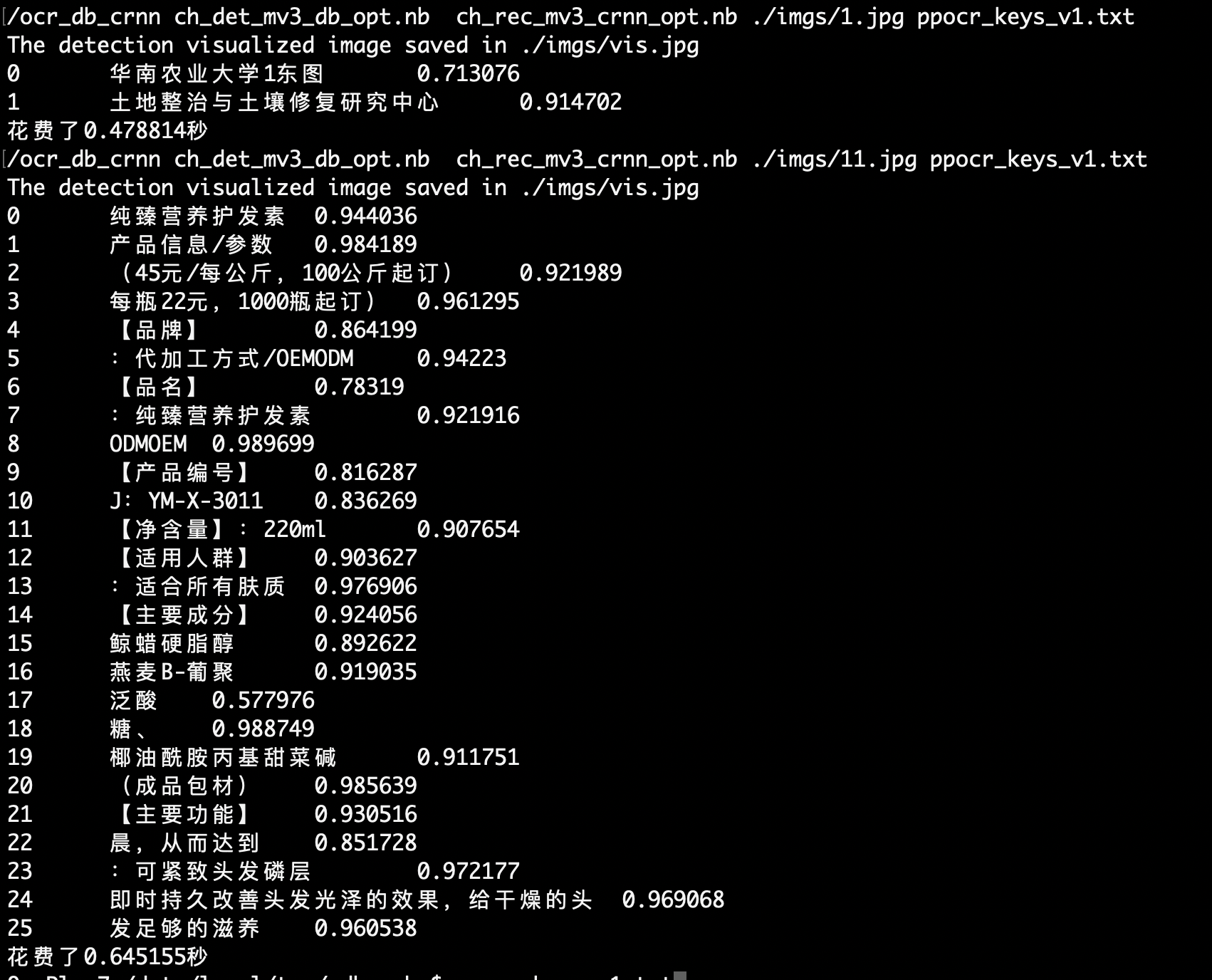
deploy/imgs/demo.png
0 → 100644
{kind=link}
997.6 KB
deploy/lite/Makefile
0 → 100644
deploy/lite/config.txt
0 → 100644
deploy/lite/crnn_process.cc
0 → 100644
deploy/lite/crnn_process.h
0 → 100644
deploy/lite/db_post_process.cc
0 → 100644
deploy/lite/db_post_process.h
0 → 100644
deploy/lite/ocr_db_crnn.cc
0 → 100644
deploy/lite/readme.md
0 → 100644