Skip to content
体验新版
项目
组织
正在加载...
登录
切换导航
打开侧边栏
SummerGao.
rt-thread
提交
1cb19e59
R
rt-thread
项目概览
SummerGao.
/
rt-thread
与 Fork 源项目一致
Fork自
RT-Thread / rt-thread
通知
1
Star
0
Fork
0
代码
文件
提交
分支
Tags
贡献者
分支图
Diff
Issue
0
列表
看板
标记
里程碑
合并请求
0
DevOps
流水线
流水线任务
计划
Wiki
0
Wiki
分析
仓库
DevOps
项目成员
Pages
R
rt-thread
项目概览
项目概览
详情
发布
仓库
仓库
文件
提交
分支
标签
贡献者
分支图
比较
Issue
0
Issue
0
列表
看板
标记
里程碑
合并请求
0
合并请求
0
Pages
DevOps
DevOps
流水线
流水线任务
计划
分析
分析
仓库分析
DevOps
Wiki
0
Wiki
成员
成员
收起侧边栏
关闭侧边栏
动态
分支图
创建新Issue
流水线任务
提交
Issue看板
体验新版 GitCode,发现更多精彩内容 >>
未验证
提交
1cb19e59
编写于
9月 18, 2021
作者:
B
Bernard Xiong
提交者:
GitHub
9月 18, 2021
浏览文件
操作
浏览文件
下载
差异文件
Merge pull request #5071 from liukangcc/master
[update] support armclang and c++11.
上级
00221bd4
b51602b1
变更
27
隐藏空白更改
内联
并排
Showing
27 changed file
with
2594 addition
and
11 deletion
+2594
-11
components/cplusplus/Kconfig
components/cplusplus/Kconfig
+12
-0
components/cplusplus/SConscript
components/cplusplus/SConscript
+12
-1
components/cplusplus/cpp11/README.md
components/cplusplus/cpp11/README.md
+49
-0
components/cplusplus/cpp11/README_ZH.md
components/cplusplus/cpp11/README_ZH.md
+48
-0
components/cplusplus/cpp11/armclang/clock.cpp
components/cplusplus/cpp11/armclang/clock.cpp
+29
-0
components/cplusplus/cpp11/armclang/condvar.cpp
components/cplusplus/cpp11/armclang/condvar.cpp
+178
-0
components/cplusplus/cpp11/armclang/miscellaneous.cpp
components/cplusplus/cpp11/armclang/miscellaneous.cpp
+22
-0
components/cplusplus/cpp11/armclang/mutex.cpp
components/cplusplus/cpp11/armclang/mutex.cpp
+108
-0
components/cplusplus/cpp11/armclang/thread.cpp
components/cplusplus/cpp11/armclang/thread.cpp
+109
-0
components/cplusplus/cpp11/armclang/tpl.h
components/cplusplus/cpp11/armclang/tpl.h
+56
-0
components/cplusplus/cpp11/atomic_8.c
components/cplusplus/cpp11/atomic_8.c
+88
-0
components/cplusplus/cpp11/emutls.c
components/cplusplus/cpp11/emutls.c
+216
-0
components/cplusplus/cpp11/figures/Snipaste_2021-09-02_16-00-09.png
.../cplusplus/cpp11/figures/Snipaste_2021-09-02_16-00-09.png
+0
-0
components/cplusplus/cpp11/gcc/__utils.h
components/cplusplus/cpp11/gcc/__utils.h
+59
-0
components/cplusplus/cpp11/gcc/condition_variable
components/cplusplus/cpp11/gcc/condition_variable
+222
-0
components/cplusplus/cpp11/gcc/condition_variable.cpp
components/cplusplus/cpp11/gcc/condition_variable.cpp
+34
-0
components/cplusplus/cpp11/gcc/future
components/cplusplus/cpp11/gcc/future
+336
-0
components/cplusplus/cpp11/gcc/mutex
components/cplusplus/cpp11/gcc/mutex
+512
-0
components/cplusplus/cpp11/gcc/mutex.cpp
components/cplusplus/cpp11/gcc/mutex.cpp
+52
-0
components/cplusplus/cpp11/gcc/thread
components/cplusplus/cpp11/gcc/thread
+239
-0
components/cplusplus/cpp11/gcc/thread.cpp
components/cplusplus/cpp11/gcc/thread.cpp
+94
-0
components/cplusplus/cpp11/gcc/utils.cpp
components/cplusplus/cpp11/gcc/utils.cpp
+29
-0
components/cplusplus/cpp11/thread_local_impl.cpp
components/cplusplus/cpp11/thread_local_impl.cpp
+34
-0
components/libc/compilers/common/nogcc/sys/types.h
components/libc/compilers/common/nogcc/sys/types.h
+1
-0
components/libc/compilers/common/sys/time.h
components/libc/compilers/common/sys/time.h
+4
-3
components/libc/pthreads/pthread.c
components/libc/pthreads/pthread.c
+46
-7
components/libc/pthreads/pthread.h
components/libc/pthreads/pthread.h
+5
-0
未找到文件。
components/cplusplus/Kconfig
浏览文件 @
1cb19e59
...
...
@@ -4,4 +4,16 @@ config RT_USING_CPLUSPLUS
bool "Support C++ features"
default n
if RT_USING_CPLUSPLUS
config RT_USING_CPLUSPLUS11
bool "Enable c++11 feature support"
default n
select RT_USING_LIBC
select RT_USING_DFS
select RT_USING_PTHREADS
select RT_USING_RTC
endif
endmenu
components/cplusplus/SConscript
浏览文件 @
1cb19e59
# RT-Thread building script for component
from
building
import
*
Import
(
'rtconfig'
)
cwd
=
GetCurrentDir
()
src
=
Glob
(
'*.cpp'
)
+
Glob
(
'*.c'
)
if
GetDepend
(
'RT_USING_CPLUSPLUS11'
):
src
+=
Glob
(
'cpp11/*.cpp'
)
+
Glob
(
'cpp11/*.c'
)
CPPPATH
=
[
cwd
]
if
rtconfig
.
PLATFORM
==
'armclang'
and
GetDepend
(
'RT_USING_CPLUSPLUS11'
):
src
+=
Glob
(
'cpp11/armclang/*.cpp'
)
+
Glob
(
'cpp11/armclang/*.c'
)
CPPPATH
+=
[
cwd
+
'/cpp11/armclang'
]
elif
rtconfig
.
PLATFORM
==
'gcc'
and
GetDepend
(
'RT_USING_CPLUSPLUS11'
):
src
+=
Glob
(
'cpp11/gcc/*.cpp'
)
+
Glob
(
'cpp11/gcc/*.c'
)
CPPPATH
+=
[
cwd
+
'/cpp11/gcc'
]
group
=
DefineGroup
(
'CPlusPlus'
,
src
,
depend
=
[
'RT_USING_CPLUSPLUS'
],
CPPPATH
=
CPPPATH
)
Return
(
'group'
)
Return
(
'group'
)
\ No newline at end of file
components/cplusplus/cpp11/README.md
0 → 100644
浏览文件 @
1cb19e59
# C++ 11 support for RT-Thread
## Features
Here are some features about rt-thread c++11 threading futures.
-
Atomic.
-
Conditional variables.
-
Clocks.
-
Future.
-
Mutexes.
-
Threads.
-
TLS.
## How To Use
Note that using C++ 11 in rt-thread requires modifying some of the files in the toolchain. Before modifying the tool, back up the tool chain.
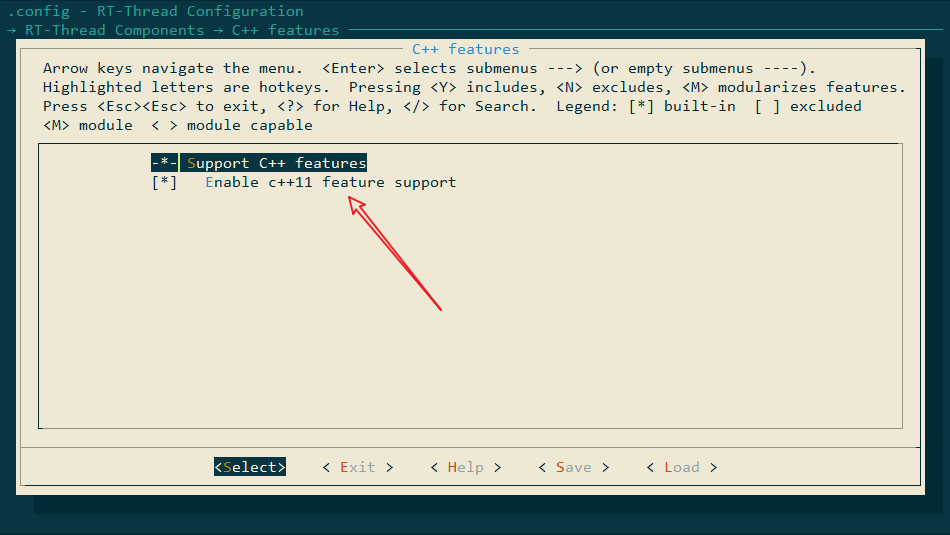
1.
Enable c++11 support
!
[](
figures/Snipaste_2021-09-02_16-00-09.png
)
2.
Download toolchain GCC 10.2.1:
```
shell
gcc version 10.2.1 20201103
(
release
)
(
GNU Arm Embedded Toolchain 10-2020-q4-major
)
```
3.
Delete the following files:
```
shell
rm
-f
toolchain/arm-none-eabi/include/c++/10.2.1/thread
rm
-f
toolchain/arm-none-eabi/include/c++/10.2.1/mutex
rm
-f
toolchain/arm-none-eabi/include/c++/10.2.1/condition_variable
rm
-f
toolchain/arm-none-eabi/include/c++/10.2.1/future
rm
-f
toolchain/arm-none-eabi/include/pthread.h
```
4.
Clear the contents of the following files and keep them to prevent compilation failures:
```
shell
toolchain/arm-none-eabi/include/sys/_pthreadtypes.h
```
5.
Update
`rtconfig.py`
file. add compilation parameters:
```
shell
CXXFLAGS
=
CFLAGS +
' -std=c++11 -fabi-version=0 -MMD -MP -MF'
```
components/cplusplus/cpp11/README_ZH.md
0 → 100644
浏览文件 @
1cb19e59
# cpp 11 support for rt-thread
## 特性
下面是 RT-Thread 支持的 C++ 11 线程特性。
-
Atomic.
-
Conditional variables.
-
Clocks.
-
Future.
-
Mutexes.
-
Threads.
-
TLS.
## 如何使用
请注意,在 RT-Thread 中使用 C++ 11,需要修改工具链中的部分文件。请在修改之前,备份好工具链。
1.
使能 c++11
!
[](
figures/Snipaste_2021-09-02_16-00-09.png
)
2.
下载 GCC 工具链
```
shell
gcc version 10.2.1 20201103
(
release
)
(
GNU Arm Embedded Toolchain 10-2020-q4-major
)
```
3.
删除下面的文件
```
shell
rm
-f
toolchain/arm-none-eabi/include/c++/10.2.1/thread
rm
-f
toolchain/arm-none-eabi/include/c++/10.2.1/mutex
rm
-f
toolchain/arm-none-eabi/include/c++/10.2.1/condition_variable
rm
-f
toolchain/arm-none-eabi/include/c++/10.2.1/future
rm
-f
toolchain/arm-none-eabi/include/pthread.h
```
4.
请清除下面文件的内容,保留文件避免编译失败
```
shell
toolchain/arm-none-eabi/include/sys/_pthreadtypes.h
```
5.
更新
`rtconfig.py`
文件,添加 c++ 编译参数:
```
shell
CXXFLAGS
=
CFLAGS +
' -std=c++11 -fabi-version=0 -MMD -MP -MF'
```
components/cplusplus/cpp11/armclang/clock.cpp
0 → 100644
浏览文件 @
1cb19e59
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-04-27 flybreak the first version.
*/
#include <arm-tpl.h>
#include <sys/time.h>
#include <rtthread.h>
extern
"C"
int
__ARM_TPL_clock_realtime
(
__ARM_TPL_timespec_t
*
__ts
)
{
unsigned
int
t
=
std
::
time
(
nullptr
);
__ts
->
tv_sec
=
t
;
__ts
->
tv_nsec
=
0
;
return
0
;
}
extern
"C"
int
__ARM_TPL_clock_monotonic
(
__ARM_TPL_timespec_t
*
__ts
)
{
unsigned
int
t
=
rt_tick_get
();
__ts
->
tv_sec
=
t
/
RT_TICK_PER_SECOND
;
__ts
->
tv_nsec
=
(
t
%
RT_TICK_PER_SECOND
)
*
NANOSECOND_PER_TICK
;
return
0
;
}
components/cplusplus/cpp11/armclang/condvar.cpp
0 → 100644
浏览文件 @
1cb19e59
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-04-27 flybreak the first version.
*/
#include <arm-tpl.h>
#include "tpl.h"
#include <new>
#include <cstdint>
#include <stdatomic.h>
arm_tpl_cv
::
arm_tpl_cv
()
{
s
=
rt_sem_create
(
"semxs"
,
0
,
RT_IPC_FLAG_PRIO
);
if
(
s
==
nullptr
)
RT_ASSERT
(
0
);
h
=
rt_sem_create
(
"semxh"
,
0
,
RT_IPC_FLAG_PRIO
);
if
(
h
==
nullptr
)
{
rt_sem_delete
(
s
);
RT_ASSERT
(
0
);
}
x
=
rt_mutex_create
(
"mutx"
,
RT_IPC_FLAG_PRIO
);
if
(
x
==
nullptr
)
{
rt_sem_delete
(
s
);
rt_sem_delete
(
h
);
RT_ASSERT
(
0
);
}
}
arm_tpl_cv
::~
arm_tpl_cv
()
{
rt_mutex_delete
(
x
);
rt_sem_delete
(
h
);
rt_sem_delete
(
s
);
}
void
arm_tpl_cv
::
wait
(
rt_mutex_t
lock
,
bool
recursive
)
{
while
(
rt_mutex_take
(
x
,
ARM_TPL_MAX_DELAY
)
!=
0
);
rt_sem_release
(
s
);
rt_mutex_release
(
x
);
if
(
recursive
)
rt_mutex_release
(
lock
);
else
rt_mutex_release
(
lock
);
while
(
rt_sem_take
(
h
,
ARM_TPL_MAX_DELAY
)
!=
0
);
if
(
recursive
)
while
(
rt_mutex_take
(
lock
,
ARM_TPL_MAX_DELAY
)
!=
0
);
else
while
(
rt_mutex_take
(
lock
,
ARM_TPL_MAX_DELAY
)
!=
0
);
}
int
arm_tpl_cv
::
timedwait
(
rt_mutex_t
lock
,
bool
recursive
,
unsigned
int
timeout_ms
)
{
int
result
=
0
;
while
(
rt_mutex_take
(
x
,
ARM_TPL_MAX_DELAY
)
!=
0
);
rt_sem_release
(
s
);
rt_mutex_release
(
x
);
if
(
recursive
)
rt_mutex_release
(
lock
);
else
rt_mutex_release
(
lock
);
if
(
rt_sem_take
(
h
,
rt_tick_from_millisecond
(
timeout_ms
))
!=
0
)
{
while
(
rt_mutex_take
(
x
,
ARM_TPL_MAX_DELAY
)
!=
0
);
if
(
rt_sem_take
(
h
,
0
)
!=
0
)
{
if
(
rt_sem_take
(
s
,
0
)
!=
0
)
result
=
-
1
;
else
result
=
1
;
}
rt_mutex_release
(
x
);
}
if
(
recursive
)
while
(
rt_mutex_take
(
lock
,
ARM_TPL_MAX_DELAY
)
!=
0
);
else
while
(
rt_mutex_take
(
lock
,
ARM_TPL_MAX_DELAY
)
!=
0
);
return
result
;
}
void
arm_tpl_cv
::
signal
()
{
while
(
rt_mutex_take
(
x
,
ARM_TPL_MAX_DELAY
)
!=
0
);
if
(
rt_sem_take
(
s
,
0
)
==
0
)
rt_sem_release
(
h
);
rt_mutex_release
(
x
);
}
void
arm_tpl_cv
::
broadcast
()
{
while
(
rt_mutex_take
(
x
,
ARM_TPL_MAX_DELAY
)
!=
0
);
auto
count
=
s
->
value
;
for
(
auto
i
=
0
;
i
<
count
;
i
++
)
{
while
(
rt_sem_take
(
s
,
ARM_TPL_MAX_DELAY
)
!=
0
);
rt_sem_release
(
h
);
}
rt_mutex_release
(
x
);
}
static
int
check_create
(
volatile
__ARM_TPL_condvar_t
*
__vcv
)
{
if
(
__vcv
->
data
==
0
)
{
uintptr_t
cv_new
;
cv_new
=
reinterpret_cast
<
uintptr_t
>
(
new
arm_tpl_cv
());
if
(
cv_new
==
0
)
{
return
-
1
;
}
uintptr_t
cv_null
=
0
;
if
(
!
atomic_compare_exchange_strong
(
&
__vcv
->
data
,
&
cv_null
,
cv_new
))
delete
reinterpret_cast
<
arm_tpl_cv
*>
(
cv_new
);
}
return
0
;
}
extern
"C"
int
__ARM_TPL_condvar_wait
(
__ARM_TPL_condvar_t
*
__cv
,
__ARM_TPL_mutex_t
*
__m
)
{
volatile
__ARM_TPL_condvar_t
*
__vcv
=
__cv
;
if
(
check_create
(
__vcv
)
!=
0
)
return
-
1
;
struct
arm_tpl_mutex_struct
*
tmutex
=
(
struct
arm_tpl_mutex_struct
*
)(
__m
->
data
);
((
arm_tpl_cv
*
)
__vcv
->
data
)
->
wait
(
tmutex
->
mutex
,
tmutex
->
type
==
RECURSIVE
);
return
0
;
}
extern
"C"
int
__ARM_TPL_condvar_timedwait
(
__ARM_TPL_condvar_t
*
__cv
,
__ARM_TPL_mutex_t
*
__m
,
__ARM_TPL_timespec_t
*
__ts
)
{
volatile
__ARM_TPL_condvar_t
*
__vcv
=
__cv
;
if
(
check_create
(
__vcv
)
!=
0
)
return
-
1
;
__ARM_TPL_timespec_t
now
;
if
(
__ARM_TPL_clock_realtime
(
&
now
)
!=
0
)
return
-
1
;
struct
arm_tpl_mutex_struct
*
tmutex
=
(
struct
arm_tpl_mutex_struct
*
)(
__m
->
data
);
unsigned
int
timeout_ms
=
(
__ts
->
tv_sec
-
now
.
tv_sec
)
*
1000
+
(
__ts
->
tv_nsec
-
now
.
tv_nsec
)
/
1000000
;
if
(((
arm_tpl_cv
*
)
__vcv
->
data
)
->
timedwait
(
tmutex
->
mutex
,
tmutex
->
type
==
RECURSIVE
,
timeout_ms
)
<
0
)
return
-
1
;
return
0
;
}
extern
"C"
int
__ARM_TPL_condvar_signal
(
__ARM_TPL_condvar_t
*
__cv
)
{
volatile
__ARM_TPL_condvar_t
*
__vcv
=
__cv
;
if
(
__vcv
->
data
!=
0
)
((
arm_tpl_cv
*
)
__vcv
->
data
)
->
signal
();
return
0
;
}
extern
"C"
int
__ARM_TPL_condvar_broadcast
(
__ARM_TPL_condvar_t
*
__cv
)
{
volatile
__ARM_TPL_condvar_t
*
__vcv
=
__cv
;
if
(
__vcv
->
data
!=
0
)
((
arm_tpl_cv
*
)
__vcv
->
data
)
->
broadcast
();
return
0
;
}
extern
"C"
int
__ARM_TPL_condvar_destroy
(
__ARM_TPL_condvar_t
*
__cv
)
{
volatile
__ARM_TPL_condvar_t
*
__vcv
=
__cv
;
if
(
__vcv
->
data
!=
0
)
{
delete
(
arm_tpl_cv
*
)
__vcv
->
data
;
__vcv
->
data
=
0
;
}
return
0
;
}
components/cplusplus/cpp11/armclang/miscellaneous.cpp
0 → 100644
浏览文件 @
1cb19e59
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-04-27 flybreak the first version.
*/
#include <arm-tpl.h>
extern
"C"
int
__ARM_TPL_execute_once
(
__ARM_TPL_exec_once_flag
*
__flag
,
void
(
*
__init_routine
)(
void
))
{
if
(
*
__flag
==
0
)
{
__init_routine
();
*
__flag
=
1
;
}
return
0
;
}
components/cplusplus/cpp11/armclang/mutex.cpp
0 → 100644
浏览文件 @
1cb19e59
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-04-27 flybreak the first version.
*/
#include <arm-tpl.h>
#include <cstdint>
#include <stdatomic.h>
#include "tpl.h"
static
int
check_create
(
volatile
__ARM_TPL_mutex_t
*
__vm
,
bool
recursive
=
false
)
{
if
(
__vm
->
data
==
0
)
{
uintptr_t
mut_null
=
0
;
arm_tpl_mutex_struct
*
mutex_p
=
(
arm_tpl_mutex_struct
*
)
rt_malloc
(
sizeof
(
arm_tpl_mutex_struct
));
if
(
mutex_p
==
nullptr
)
return
-
1
;
if
(
recursive
)
mutex_p
->
mutex
=
rt_mutex_create
(
"mutexx"
,
RT_IPC_FLAG_PRIO
);
else
mutex_p
->
mutex
=
rt_mutex_create
(
"mutexx"
,
RT_IPC_FLAG_PRIO
);
if
(
mutex_p
->
mutex
==
nullptr
)
{
rt_free
(
mutex_p
);
return
-
1
;
}
mutex_p
->
type
=
recursive
?
RECURSIVE
:
NORMAL
;
uintptr_t
mut_new
=
reinterpret_cast
<
uintptr_t
>
(
mutex_p
);
if
(
!
atomic_compare_exchange_strong
(
&
__vm
->
data
,
&
mut_null
,
mut_new
))
{
rt_mutex_delete
(
mutex_p
->
mutex
);
rt_free
(
mutex_p
);
}
}
return
0
;
}
static
int
mutexLock
(
arm_tpl_mutex_struct
*
mutex_p
,
rt_tick_t
timeOut
)
{
if
(
mutex_p
->
type
==
RECURSIVE
)
{
if
(
rt_mutex_take
(
mutex_p
->
mutex
,
timeOut
)
==
0
)
return
0
;
}
else
{
if
(
rt_mutex_take
(
mutex_p
->
mutex
,
timeOut
)
==
0
)
return
0
;
}
return
-
1
;
}
static
int
mutexUnlock
(
arm_tpl_mutex_struct
*
mutex_p
)
{
if
(
mutex_p
->
type
==
RECURSIVE
)
rt_mutex_release
(
mutex_p
->
mutex
);
else
rt_mutex_release
(
mutex_p
->
mutex
);
return
0
;
}
extern
"C"
int
__ARM_TPL_recursive_mutex_init
(
__ARM_TPL_mutex_t
*
__m
)
{
volatile
__ARM_TPL_mutex_t
*
__vm
=
__m
;
return
check_create
(
__vm
,
true
);
}
extern
"C"
int
__ARM_TPL_mutex_lock
(
__ARM_TPL_mutex_t
*
__m
)
{
volatile
__ARM_TPL_mutex_t
*
__vm
=
__m
;
if
(
check_create
(
__vm
))
return
-
1
;
while
(
mutexLock
((
arm_tpl_mutex_struct
*
)(
__vm
->
data
),
ARM_TPL_MAX_DELAY
)
!=
0
);
return
0
;
}
extern
"C"
int
__ARM_TPL_mutex_trylock
(
__ARM_TPL_mutex_t
*
__m
)
{
volatile
__ARM_TPL_mutex_t
*
__vm
=
__m
;
if
(
check_create
(
__vm
))
return
-
1
;
return
mutexLock
((
arm_tpl_mutex_struct
*
)(
__vm
->
data
),
0
);
}
extern
"C"
int
__ARM_TPL_mutex_unlock
(
__ARM_TPL_mutex_t
*
__m
)
{
volatile
__ARM_TPL_mutex_t
*
__vm
=
__m
;
return
mutexUnlock
((
arm_tpl_mutex_struct
*
)(
__vm
->
data
));
}
extern
"C"
int
__ARM_TPL_mutex_destroy
(
__ARM_TPL_mutex_t
*
__m
)
{
volatile
__ARM_TPL_mutex_t
*
__vm
=
__m
;
if
(
__vm
->
data
!=
0
)
{
rt_mutex_delete
(((
arm_tpl_mutex_struct
*
)(
__vm
->
data
))
->
mutex
);
rt_free
((
void
*
)(
__vm
->
data
));
__vm
->
data
=
0
;
}
return
0
;
}
components/cplusplus/cpp11/armclang/thread.cpp
0 → 100644
浏览文件 @
1cb19e59
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-04-27 flybreak the first version.
*/
#include <arm-tpl.h>
#include "tpl.h"
#include <cstdio>
#include <pthread.h>
extern
"C"
int
__ARM_TPL_thread_create
(
__ARM_TPL_thread_t
*
__t
,
void
*
(
*
__func
)(
void
*
),
void
*
__arg
)
{
int
ret
=
0
;
/* TODO memory leek */
pthread_t
*
pid
=
(
pthread_t
*
)
rt_malloc
(
sizeof
(
pthread_t
));
if
(
pid
==
nullptr
)
return
-
1
;
ret
=
pthread_create
(
pid
,
RT_NULL
,
__func
,
__arg
);
if
(
ret
==
0
)
{
__t
->
data
=
(
std
::
uintptr_t
)
pid
;
return
0
;
}
return
-
1
;
}
extern
"C"
int
__ARM_TPL_thread_id_compare
(
__ARM_TPL_thread_id
__tid1
,
__ARM_TPL_thread_id
__tid2
)
{
if
(
__tid1
>
__tid2
)
return
1
;
else
if
(
__tid1
<
__tid2
)
return
-
1
;
else
return
0
;
}
extern
"C"
__ARM_TPL_thread_id
__ARM_TPL_thread_get_current_id
()
{
return
(
__ARM_TPL_thread_id
)
pthread_self
();
}
extern
"C"
__ARM_TPL_thread_id
__ARM_TPL_thread_get_id
(
const
__ARM_TPL_thread_t
*
__t
)
{
return
(
__ARM_TPL_thread_id
)((
*
(
pthread_t
*
)
__t
->
data
));
}
extern
"C"
int
__ARM_TPL_thread_join
(
__ARM_TPL_thread_t
*
__t
)
{
pthread_join
((
*
(
pthread_t
*
)
__t
->
data
),
RT_NULL
);
return
0
;
}
extern
"C"
int
__ARM_TPL_thread_detach
(
__ARM_TPL_thread_t
*
__t
)
{
pthread_detach
((
*
(
pthread_t
*
)
__t
->
data
));
return
0
;
}
extern
"C"
void
__ARM_TPL_thread_yield
()
{
rt_thread_yield
();
}
extern
"C"
int
__ARM_TPL_thread_nanosleep
(
const
__ARM_TPL_timespec_t
*
__req
,
__ARM_TPL_timespec_t
*
__rem
)
{
return
nanosleep
(
__req
,
rem
);
}
extern
"C"
unsigned
__ARM_TPL_thread_hw_concurrency
()
{
return
1
;
}
extern
"C"
int
__ARM_TPL_tls_create
(
__ARM_TPL_tls_key
*
__key
,
void
(
*
__at_exit
)(
void
*
))
{
pthread_key_t
key
;
if
(
pthread_key_create
(
&
key
,
__at_exit
)
==
0
)
{
*
__key
=
key
;
return
0
;
}
return
-
1
;
}
extern
"C"
void
*
__ARM_TPL_tls_get
(
__ARM_TPL_tls_key
__key
)
{
return
pthread_getspecific
(
__key
);
}
extern
"C"
int
__ARM_TPL_tls_set
(
__ARM_TPL_tls_key
__key
,
void
*
__p
)
{
if
(
pthread_setspecific
(
__key
,
(
void
*
)
__p
)
!=
0
)
{
return
-
1
;
}
return
0
;
}
components/cplusplus/cpp11/armclang/tpl.h
0 → 100644
浏览文件 @
1cb19e59
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-04-27 flybreak the first version.
*/
#pragma once
#ifndef __cplusplus
void
ARMTPLInit
();
#else
#include <rtthread.h>
#define ARM_TPL_MAX_DELAY 1000
#define ARM_TPL_THREAD_STACK_SIZE 4096
enum
arm_tpl_mutex_type
{
NORMAL
,
RECURSIVE
,
};
struct
arm_tpl_mutex_struct
{
rt_mutex_t
mutex
;
arm_tpl_mutex_type
type
;
};
struct
arm_tpl_thread_struct
{
rt_thread_t
task
;
void
*
(
*
func
)(
void
*
);
void
*
arg
;
rt_sem_t
join_sem
;
rt_sem_t
detach_sem
;
};
class
arm_tpl_cv
{
public:
arm_tpl_cv
();
~
arm_tpl_cv
();
void
wait
(
rt_mutex_t
lock
,
bool
recursive
);
int
timedwait
(
rt_mutex_t
lock
,
bool
recursive
,
unsigned
int
timeout_ms
);
void
signal
();
void
broadcast
();
private:
rt_sem_t
s
;
rt_sem_t
h
;
rt_mutex_t
x
;
};
#endif
components/cplusplus/cpp11/atomic_8.c
0 → 100644
浏览文件 @
1cb19e59
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-04-27 peterfan Add copyright header.
*/
#include <rthw.h>
#include <stdint.h>
#include <stdbool.h>
/*
* override gcc builtin atomic function for std::atomic<int64_t>, std::atomic<uint64_t>
* @see https://gcc.gnu.org/onlinedocs/gcc/_005f_005fatomic-Builtins.html
*/
uint64_t
__atomic_load_8
(
volatile
void
*
ptr
,
int
memorder
)
{
volatile
uint64_t
*
val_ptr
=
(
volatile
uint64_t
*
)
ptr
;
register
rt_base_t
level
;
uint64_t
tmp
;
level
=
rt_hw_interrupt_disable
();
tmp
=
*
val_ptr
;
rt_hw_interrupt_enable
(
level
);
return
tmp
;
}
void
__atomic_store_8
(
volatile
void
*
ptr
,
uint64_t
val
,
int
memorder
)
{
volatile
uint64_t
*
val_ptr
=
(
volatile
uint64_t
*
)
ptr
;
register
rt_base_t
level
;
level
=
rt_hw_interrupt_disable
();
*
val_ptr
=
val
;
rt_hw_interrupt_enable
(
level
);
}
uint64_t
__atomic_exchange_8
(
volatile
void
*
ptr
,
uint64_t
val
,
int
memorder
)
{
volatile
uint64_t
*
val_ptr
=
(
volatile
uint64_t
*
)
ptr
;
register
rt_base_t
level
;
uint64_t
tmp
;
level
=
rt_hw_interrupt_disable
();
tmp
=
*
val_ptr
;
*
val_ptr
=
val
;
rt_hw_interrupt_enable
(
level
);
return
tmp
;
}
bool
__atomic_compare_exchange_8
(
volatile
void
*
ptr
,
volatile
void
*
expected
,
uint64_t
desired
,
bool
weak
,
int
success_memorder
,
int
failure_memorder
)
{
volatile
uint64_t
*
val_ptr
=
(
volatile
uint64_t
*
)
ptr
;
volatile
uint64_t
*
expected_ptr
=
(
volatile
uint64_t
*
)
expected
;
register
rt_base_t
level
;
bool
exchanged
;
level
=
rt_hw_interrupt_disable
();
if
(
*
val_ptr
==
*
expected_ptr
)
{
*
val_ptr
=
desired
;
exchanged
=
true
;
}
else
{
*
expected_ptr
=
*
val_ptr
;
exchanged
=
false
;
}
rt_hw_interrupt_enable
(
level
);
return
exchanged
;
}
#define __atomic_fetch_op_8(OPNAME, OP) \
uint64_t __atomic_fetch_##OPNAME##_8(volatile void *ptr, uint64_t val, int memorder) {\
volatile uint64_t* val_ptr = (volatile uint64_t*)ptr;\
register rt_base_t level;\
uint64_t tmp;\
level = rt_hw_interrupt_disable();\
tmp = *val_ptr;\
*val_ptr OP##= val;\
rt_hw_interrupt_enable(level);\
return tmp;\
}
__atomic_fetch_op_8
(
add
,
+
)
__atomic_fetch_op_8
(
sub
,
-
)
__atomic_fetch_op_8
(
and
,
&
)
__atomic_fetch_op_8
(
or
,
|
)
__atomic_fetch_op_8
(
xor
,
^
)
components/cplusplus/cpp11/emutls.c
0 → 100644
浏览文件 @
1cb19e59
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-04-27 peterfan Add copyright header.
*/
/* ===---------- emutls.c - Implements __emutls_get_address ---------------===
*
* The LLVM Compiler Infrastructure
*
* This file is dual licensed under the MIT and the University of Illinois Open
* Source Licenses. See LICENSE.TXT for details.
*
* ===----------------------------------------------------------------------===
*/
#include <pthread.h>
#include <stdint.h>
#include <stdlib.h>
#include <string.h>
#define COMPILE_TIME_ASSERT(x)
extern
int
pthread_key_create
(
pthread_key_t
*
key
,
void
(
*
destructor
)(
void
*
));
extern
int
pthread_key_delete
(
pthread_key_t
key
);
extern
void
*
pthread_getspecific
(
pthread_key_t
key
);
extern
int
pthread_setspecific
(
pthread_key_t
key
,
const
void
*
value
);
/* Default is not to use posix_memalign, so systems like Android
* can use thread local data without heavier POSIX memory allocators.
*/
#ifndef EMUTLS_USE_POSIX_MEMALIGN
#define EMUTLS_USE_POSIX_MEMALIGN 0
#endif
/* For every TLS variable xyz,
* there is one __emutls_control variable named __emutls_v.xyz.
* If xyz has non-zero initial value, __emutls_v.xyz's "value"
* will point to __emutls_t.xyz, which has the initial value.
*/
typedef
struct
__emutls_control
{
size_t
size
;
/* size of the object in bytes */
size_t
align
;
/* alignment of the object in bytes */
union
{
uintptr_t
index
;
/* data[index-1] is the object address */
void
*
address
;
/* object address, when in single thread env */
}
object
;
void
*
value
;
/* null or non-zero initial value for the object */
}
__emutls_control
;
static
__inline
void
*
emutls_memalign_alloc
(
size_t
align
,
size_t
size
)
{
void
*
base
;
#if EMUTLS_USE_POSIX_MEMALIGN
if
(
posix_memalign
(
&
base
,
align
,
size
)
!=
0
)
abort
();
#else
#define EXTRA_ALIGN_PTR_BYTES (align - 1 + sizeof(void *))
char
*
object
;
if
((
object
=
malloc
(
EXTRA_ALIGN_PTR_BYTES
+
size
))
==
NULL
)
abort
();
base
=
(
void
*
)(((
uintptr_t
)(
object
+
EXTRA_ALIGN_PTR_BYTES
))
&
~
(
uintptr_t
)(
align
-
1
));
((
void
**
)
base
)[
-
1
]
=
object
;
#endif
return
base
;
}
static
__inline
void
emutls_memalign_free
(
void
*
base
)
{
#if EMUTLS_USE_POSIX_MEMALIGN
free
(
base
);
#else
/* The mallocated address is in ((void**)base)[-1] */
free
(((
void
**
)
base
)[
-
1
]);
#endif
}
/* Emulated TLS objects are always allocated at run-time. */
static
__inline
void
*
emutls_allocate_object
(
__emutls_control
*
control
)
{
/* Use standard C types, check with gcc's emutls.o. */
typedef
unsigned
int
gcc_word
__attribute__
((
mode
(
word
)));
typedef
unsigned
int
gcc_pointer
__attribute__
((
mode
(
pointer
)));
COMPILE_TIME_ASSERT
(
sizeof
(
size_t
)
==
sizeof
(
gcc_word
));
COMPILE_TIME_ASSERT
(
sizeof
(
uintptr_t
)
==
sizeof
(
gcc_pointer
));
COMPILE_TIME_ASSERT
(
sizeof
(
uintptr_t
)
==
sizeof
(
void
*
));
size_t
size
=
control
->
size
;
size_t
align
=
control
->
align
;
if
(
align
<
sizeof
(
void
*
))
align
=
sizeof
(
void
*
);
/* Make sure that align is power of 2. */
if
((
align
&
(
align
-
1
))
!=
0
)
abort
();
void
*
base
=
emutls_memalign_alloc
(
align
,
size
);
if
(
control
->
value
)
memcpy
(
base
,
control
->
value
,
size
);
else
memset
(
base
,
0
,
size
);
return
base
;
}
static
pthread_mutex_t
emutls_mutex
=
PTHREAD_MUTEX_INITIALIZER
;
static
size_t
emutls_num_object
=
0
;
/* number of allocated TLS objects */
typedef
struct
emutls_address_array
{
uintptr_t
size
;
/* number of elements in the 'data' array */
void
*
data
[];
}
emutls_address_array
;
static
pthread_key_t
emutls_pthread_key
;
static
void
emutls_key_destructor
(
void
*
ptr
)
{
emutls_address_array
*
array
=
(
emutls_address_array
*
)
ptr
;
uintptr_t
i
;
for
(
i
=
0
;
i
<
array
->
size
;
++
i
)
{
if
(
array
->
data
[
i
])
emutls_memalign_free
(
array
->
data
[
i
]);
}
free
(
ptr
);
}
static
void
emutls_init
(
void
)
{
if
(
pthread_key_create
(
&
emutls_pthread_key
,
emutls_key_destructor
)
!=
0
)
abort
();
}
/* Returns control->object.index; set index if not allocated yet. */
static
__inline
uintptr_t
emutls_get_index
(
__emutls_control
*
control
)
{
uintptr_t
index
=
__atomic_load_n
(
&
control
->
object
.
index
,
__ATOMIC_ACQUIRE
);
if
(
!
index
)
{
static
pthread_once_t
once
=
PTHREAD_ONCE_INIT
;
pthread_once
(
&
once
,
emutls_init
);
pthread_mutex_lock
(
&
emutls_mutex
);
index
=
control
->
object
.
index
;
if
(
!
index
)
{
index
=
++
emutls_num_object
;
__atomic_store_n
(
&
control
->
object
.
index
,
index
,
__ATOMIC_RELEASE
);
}
pthread_mutex_unlock
(
&
emutls_mutex
);
}
return
index
;
}
/* Updates newly allocated thread local emutls_address_array. */
static
__inline
void
emutls_check_array_set_size
(
emutls_address_array
*
array
,
uintptr_t
size
)
{
if
(
array
==
NULL
)
abort
();
array
->
size
=
size
;
pthread_setspecific
(
emutls_pthread_key
,
(
void
*
)
array
);
}
/* Returns the new 'data' array size, number of elements,
* which must be no smaller than the given index.
*/
static
__inline
uintptr_t
emutls_new_data_array_size
(
uintptr_t
index
)
{
/* Need to allocate emutls_address_array with one extra slot
* to store the data array size.
* Round up the emutls_address_array size to multiple of 16.
*/
return
((
index
+
1
+
15
)
&
~
((
uintptr_t
)
15
))
-
1
;
}
/* Returns the thread local emutls_address_array.
* Extends its size if necessary to hold address at index.
*/
static
__inline
emutls_address_array
*
emutls_get_address_array
(
uintptr_t
index
)
{
emutls_address_array
*
array
=
pthread_getspecific
(
emutls_pthread_key
);
if
(
array
==
NULL
)
{
uintptr_t
new_size
=
emutls_new_data_array_size
(
index
);
array
=
calloc
(
new_size
+
1
,
sizeof
(
void
*
));
emutls_check_array_set_size
(
array
,
new_size
);
}
else
if
(
index
>
array
->
size
)
{
uintptr_t
orig_size
=
array
->
size
;
uintptr_t
new_size
=
emutls_new_data_array_size
(
index
);
array
=
realloc
(
array
,
(
new_size
+
1
)
*
sizeof
(
void
*
));
if
(
array
)
memset
(
array
->
data
+
orig_size
,
0
,
(
new_size
-
orig_size
)
*
sizeof
(
void
*
));
emutls_check_array_set_size
(
array
,
new_size
);
}
return
array
;
}
void
*
__emutls_get_address
(
void
*
control
)
{
uintptr_t
index
=
emutls_get_index
((
__emutls_control
*
)
control
);
emutls_address_array
*
array
=
emutls_get_address_array
(
index
);
if
(
array
->
data
[
index
-
1
]
==
NULL
)
array
->
data
[
index
-
1
]
=
emutls_allocate_object
((
__emutls_control
*
)
control
);
return
array
->
data
[
index
-
1
];
}
components/cplusplus/cpp11/figures/Snipaste_2021-09-02_16-00-09.png
0 → 100644
浏览文件 @
1cb19e59
23.6 KB
components/cplusplus/cpp11/gcc/__utils.h
0 → 100644
浏览文件 @
1cb19e59
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-04-27 flybreak the first version.
*/
#pragma once
#include <cstdlib>
#include <system_error>
#include <chrono>
#include <ratio>
#include <rtthread.h>
#define RT_USING_CPP_EXCEPTION
inline
void
throw_system_error
(
int
err
,
const
char
*
what_msg
)
{
#ifdef RT_USING_CPP_EXCEPTION
throw
std
::
system_error
(
std
::
error_code
(
err
,
std
::
system_category
()),
what_msg
);
#else
(
void
)
err
;
(
void
)
what_msg
;
::
abort
();
#endif
}
class
tick_clock
{
public:
typedef
clock_t
rep
;
typedef
std
::
ratio
<
1
,
RT_TICK_PER_SECOND
>
period
;
typedef
std
::
chrono
::
duration
<
tick_clock
::
rep
,
tick_clock
::
period
>
duration
;
typedef
std
::
chrono
::
time_point
<
tick_clock
>
time_point
;
constexpr
static
bool
is_ready
=
true
;
static
time_point
now
();
};
class
real_time_clock
{
public:
typedef
std
::
chrono
::
nanoseconds
duration
;
typedef
duration
::
rep
rep
;
typedef
duration
::
period
period
;
typedef
std
::
chrono
::
time_point
<
real_time_clock
,
duration
>
time_point
;
static
constexpr
bool
is_steady
=
true
;
static
time_point
now
()
noexcept
;
};
components/cplusplus/cpp11/gcc/condition_variable
0 → 100644
浏览文件 @
1cb19e59
#pragma once
#if __cplusplus < 201103L
#error "C++ version lower than C++11"
#endif
#include <pthread.h>
#include <system_error>
#include <chrono>
#include <utility>
#include <functional>
#include <memory>
#include "__utils.h"
#include "mutex"
#define rt_cpp_cond_var pthread_cond_t
namespace std
{
enum class cv_status
{
no_timeout,
timeout
};
class condition_variable
{
public:
typedef rt_cpp_cond_var *native_handle_type;
condition_variable(const condition_variable &) = delete;
condition_variable &operator=(const condition_variable &) = delete;
condition_variable() = default;
~condition_variable()
{
pthread_cond_destroy(&_m_cond);
}
void wait(unique_lock<mutex> &lock);
void notify_one() noexcept
{
pthread_cond_signal(&_m_cond);
}
void notify_all() noexcept
{
pthread_cond_broadcast(&_m_cond);
}
template <class Predicate>
void wait(unique_lock<mutex> &lock, Predicate pred)
{
while (!pred())
wait(lock);
}
template <class Clock, class Duration>
cv_status wait_until(unique_lock<mutex> &lock,
const chrono::time_point<Clock, Duration> &abs_time)
{
if (!lock.owns_lock())
throw_system_error((int)errc::operation_not_permitted,
"condition_variable::wailt_until: waiting on unlocked lock");
auto secs = chrono::time_point_cast<chrono::seconds>(abs_time);
auto nano_secs = chrono::duration_cast<chrono::nanoseconds>(abs_time - secs);
struct timespec c_abs_time = {static_cast<time_t>(secs.time_since_epoch().count()),
static_cast<long>(nano_secs.count())};
pthread_cond_timedwait(&_m_cond, lock.mutex()->native_handle(), &c_abs_time);
return (Clock::now() < abs_time) ? cv_status::no_timeout : cv_status::timeout;
}
template <class Clock, class Duration, class Predicate>
bool wait_until(unique_lock<mutex> &lock,
const chrono::time_point<Clock, Duration> &abs_time,
Predicate pred)
{
while (!pred())
if (wait_until(lock, abs_time) == cv_status::timeout)
return pred();
return true;
}
template <class Rep, class Period>
cv_status wait_for(unique_lock<mutex> &lock,
const chrono::duration<Rep, Period> &rel_time)
{
return wait_until(lock, real_time_clock::now() + rel_time);
}
template <class Rep, class Period, class Predicate>
bool wait_for(unique_lock<mutex> &lock,
const chrono::duration<Rep, Period> &rel_time,
Predicate pred)
{
return wait_until(lock, real_time_clock::now() + rel_time, std::move(pred));
}
native_handle_type native_handle()
{
return &_m_cond;
}
private:
rt_cpp_cond_var _m_cond = PTHREAD_COND_INITIALIZER;
};
// Lockable is only required to have `lock()` and `unlock()`
class condition_variable_any
{
private:
condition_variable _m_cond;
shared_ptr<mutex> _m_mtx;
// so that Lockable automatically unlocks when waiting and locks after waiting
template <class Lockable>
struct unlocker
{
Lockable &_m_lock;
explicit unlocker(Lockable &lk)
: _m_lock(lk)
{
_m_lock.unlock();
}
~unlocker()
{
_m_lock.lock();
}
unlocker(const unlocker &) = delete;
unlocker &operator=(const unlocker &) = delete;
};
public:
condition_variable_any() : _m_mtx(std::make_shared<mutex>()) {}
~condition_variable_any() = default;
condition_variable_any(const condition_variable_any &) = delete;
condition_variable_any &operator=(const condition_variable_any &) = delete;
void notify_one() noexcept
{
lock_guard<mutex> lk(*_m_mtx);
_m_cond.notify_one();
}
void notify_all() noexcept
{
lock_guard<mutex> lk(*_m_mtx);
_m_cond.notify_all();
}
template <class Lock>
void wait(Lock &lock)
{
shared_ptr<mutex> mut = _m_mtx;
unique_lock<mutex> lk(*mut);
unlocker<Lock> auto_lk(lock); // unlock here
unique_lock<mutex> lk2(std::move(lk));
_m_cond.wait(lk2);
} // mut.unlock(); lock.lock();
template <class Lock, class Predicate>
void wait(Lock &lock, Predicate pred)
{
while (!pred())
wait(lock);
}
template <class Lock, class Clock, class Duration>
cv_status wait_until(Lock &lock,
const chrono::time_point<Clock, Duration> &abs_time)
{
shared_ptr<mutex> mut = _m_mtx;
unique_lock<mutex> lk(*mut);
unlocker<Lock> auto_lk(lock); // unlock here
unique_lock<mutex> lk2(std::move(lk));
return _m_cond.wait_until(lk2, abs_time);
}
template <class Lock, class Clock, class Duration, class Predicate>
bool wait_until(Lock &lock,
const chrono::time_point<Clock, Duration> &abs_time,
Predicate pred)
{
while (!pred())
if (wait_until(lock, abs_time) == cv_status::timeout)
return pred();
return true;
}
template <class Lock, class Rep, class Period>
cv_status wait_for(Lock &lock,
const chrono::duration<Rep, Period> &rel_time)
{
return wait_until(lock, real_time_clock::now() + rel_time);
}
template <class Lock, class Rep, class Period, class Predicate>
bool wait_for(Lock &lock,
const chrono::duration<Rep, Period> &rel_time,
Predicate pred)
{
return wait_until(lock, real_time_clock::now() + rel_time, std::move(pred));
}
};
void notify_all_at_thread_exit(condition_variable &cond, unique_lock<mutex> lk);
} // namespace std
components/cplusplus/cpp11/gcc/condition_variable.cpp
0 → 100644
浏览文件 @
1cb19e59
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-04-27 flybreak the first version.
*/
#include "condition_variable"
namespace
std
{
void
condition_variable
::
wait
(
unique_lock
<
mutex
>&
lock
)
{
int
err
=
pthread_cond_wait
(
&
_m_cond
,
lock
.
mutex
()
->
native_handle
());
if
(
err
)
{
throw_system_error
(
err
,
"condition_variable::wait: failed to wait on a condition"
);
}
}
void
notify_all_at_thread_exit
(
condition_variable
&
cond
,
unique_lock
<
mutex
>
lk
)
{
// TLS currently not available
mutex
*
mut
=
lk
.
release
();
mut
->
unlock
();
cond
.
notify_all
();
}
}
// namespace std
components/cplusplus/cpp11/gcc/future
0 → 100644
浏览文件 @
1cb19e59
#pragma once
#if __cplusplus < 201103L
#error "C++ version lower than C++11"
#endif
#include <mutex>
#include <condition_variable>
#include <memory>
#include <chrono>
#include <cassert>
namespace std {
enum class future_status {
ready,
timeout,
deferred
};
namespace detail {
class shared_state_base {
protected:
typedef void (*deleter_fn)(void *v);
using scoped_lock = std::lock_guard<std::mutex>;
using unique_lock = std::unique_lock<std::mutex>;
public:
explicit shared_state_base(deleter_fn d) : v_(nullptr), d_(d), valid_(true) {}
~shared_state_base() { d_(v_); }
shared_state_base(shared_state_base &&other) = delete;
shared_state_base(const shared_state_base &other) = delete;
shared_state_base &operator=(shared_state_base &&other) = delete;
shared_state_base &operator=(const shared_state_base &other) = delete;
void wait() {
unique_lock lock(m_);
c_.wait(lock, [this] { return has_value(); });
}
template <class Rep, class Period>
std::future_status
wait_for(const std::chrono::duration<Rep, Period> &rel_time) {
unique_lock lock(m_);
if (c_.wait_for(lock, rel_time, [this] { return has_value(); })) {
return std::future_status::ready;
}
return std::future_status::timeout;
}
template <class Clock, class Duration>
std::future_status
wait_until(const std::chrono::time_point<Clock, Duration> &abs_time) {
unique_lock lock(m_);
if (c_.wait_until(lock, abs_time, [this] { return has_value(); })) {
return std::future_status::ready;
}
return std::future_status::timeout;
}
protected:
bool has_value() { return v_ != nullptr; }
protected:
std::mutex m_;
std::condition_variable c_;
void *v_;
deleter_fn d_;
bool valid_;
};
template <typename R>
class shared_state: public shared_state_base {
public:
shared_state() :shared_state_base(default_deleter_) {}
~shared_state() {}
R &get() {
wait();
scoped_lock lock(m_);
assert(valid_);
valid_ = false;
return *(static_cast<R *>(v_));
}
void set(const R &v) {
scoped_lock lock(m_);
assert(!has_value());
v_ = new R(v);
valid_ = true;
c_.notify_one();
}
void set(R &&v) {
scoped_lock lock(m_);
assert(!has_value());
v_ = new R(std::move(v));
valid_ = true;
c_.notify_one();
}
bool valid() {
scoped_lock lock(m_);
return valid_;
}
private:
static void default_deleter_(void *v) { delete static_cast<R *>(v); }
};
} // namespace detail
template <typename R>
class shared_future {
};
template <typename R>
class future {
using state_type = std::shared_ptr<detail::shared_state<R>>;
public:
future() {}
explicit future(const state_type &state) : state_(state) {}
future(future &&other) noexcept: state_(std::move(other.state_)) {
other.state_.reset();
}
future(const future &other) = delete;
~future() {}
future &operator=(future &&other) noexcept {
if (&other != this) {
state_ = std::move(other.state_);
other.state_.reset();
}
return *this;
}
future &operator=(const future &other) = delete;
void swap(future &other) noexcept {
std::swap(state_, other.state_);
}
std::shared_future<R> share() noexcept { return std::shared_future<R>(); }
R get() { return state_->get(); }
bool valid() const noexcept { return state_->valid(); }
void wait() const { state_->wait(); }
template <class Rep, class Period>
std::future_status
wait_for(const std::chrono::duration<Rep, Period> &rel_time) const {
return state_->wait_for(rel_time);
}
template <class Clock, class Duration>
std::future_status
wait_until(const std::chrono::time_point<Clock, Duration> &abs_time) const {
return state_->wait_until(abs_time);
}
private:
state_type state_;
};
template <>
class future<void> {
using state_type = std::shared_ptr<detail::shared_state<int>>;
public:
future() {}
explicit future(const state_type &state) : state_(state) {}
future(future &&other) noexcept: state_(std::move(other.state_)) {
other.state_.reset();
}
future(const future &other) = delete;
~future() {}
future &operator=(future &&other) noexcept {
if (&other != this) {
state_ = std::move(other.state_);
other.state_.reset();
}
return *this;
}
future &operator=(const future &other) = delete;
void swap(future &other) noexcept {
std::swap(state_, other.state_);
}
std::shared_future<void> share() noexcept { return std::shared_future<void>(); }
void get() { state_->get(); }
bool valid() const noexcept { return state_->valid(); }
void wait() const { state_->wait(); }
template <class Rep, class Period>
std::future_status
wait_for(const std::chrono::duration<Rep, Period> &rel_time) const {
return state_->wait_for(rel_time);
}
template <class Clock, class Duration>
std::future_status
wait_until(const std::chrono::time_point<Clock, Duration> &abs_time) const {
return state_->wait_until(abs_time);
}
private:
state_type state_;
};
template <typename R>
class promise {
using state_type = std::shared_ptr<detail::shared_state<R>>;
public:
promise() : state_(new detail::shared_state<R>()) {}
promise(promise &&other) noexcept: state_(std::move(other.state_)) {
other.state_.reset();
}
promise(const promise &other) = delete;
~promise() {}
promise &operator=(promise &&other) noexcept {
if (&other != this) {
state_ = std::move(other.state_);
other.state_.reset();
}
return *this;
}
promise &operator=(const promise &other) = delete;
void swap(promise &other) noexcept {
std::swap(state_, other.state_);
}
std::future<R> get_future() { return std::future<R>(state_); }
void set_value(const R &value) { state_->set(value); }
void set_value(R &&value) { state_->set(std::move(value)); }
void set_value_at_thread_exit(const R &value);
void set_value_at_thread_exit(R &&value);
void set_exception(std::exception_ptr p);
void set_exception_at_thread_exit(std::exception_ptr p);
private:
state_type state_;
};
template <>
class promise<void> {
using state_type = std::shared_ptr<detail::shared_state<int>>;
public:
promise() : state_(new detail::shared_state<int>()) {}
promise(promise &&other) noexcept: state_(std::move(other.state_)) {
other.state_.reset();
}
promise(const promise &other) = delete;
~promise() {}
promise &operator=(promise &&other) noexcept {
if (&other != this) {
state_ = std::move(other.state_);
other.state_.reset();
}
return *this;
}
promise &operator=(const promise &other) = delete;
void swap(promise &other) noexcept {
std::swap(state_, other.state_);
}
std::future<void> get_future() { return std::future<void>(state_); }
void set_value() { state_->set(0); }
void set_value_at_thread_exit();
void set_exception(std::exception_ptr p);
void set_exception_at_thread_exit(std::exception_ptr p);
private:
state_type state_;
};
template <class R>
void swap(std::future<R> &lhs, std::future<R> &rhs) noexcept {
lhs.swap(rhs);
}
template <class R>
void swap(std::promise<R> &lhs, std::promise<R> &rhs) noexcept {
lhs.swap(rhs);
}
} // namespace std
components/cplusplus/cpp11/gcc/mutex
0 → 100644
浏览文件 @
1cb19e59
#pragma once
#if __cplusplus < 201103L
#error "C++ version lower than C++11"
#endif
//#if defined(RT_USING_LIBC) && defined(RT_USING_PTHREADS)
#include <pthread.h>
#include <system_error>
#include <chrono>
#include <utility>
#include <functional>
#include "__utils.h"
#define rt_cpp_mutex_t pthread_mutex_t
namespace std
{
// Base class on which to build std::mutex and std::timed_mutex
class __mutex_base
{
protected:
typedef rt_cpp_mutex_t __native_type;
__native_type _m_mutex = PTHREAD_MUTEX_INITIALIZER;
constexpr __mutex_base() noexcept = default;
__mutex_base(const __mutex_base&) = delete;
__mutex_base& operator=(const __mutex_base&) = delete;
};
class mutex : private __mutex_base
{
public:
constexpr mutex() = default;
~mutex() = default;
mutex(const mutex&) = delete;
mutex& operator=(const mutex&) = delete;
void lock()
{
int err = pthread_mutex_lock(&_m_mutex);
if (err)
{
throw_system_error(err, "mutex:lock failed.");
}
}
bool try_lock() noexcept
{
return !pthread_mutex_trylock(&_m_mutex);
}
void unlock() noexcept
{
pthread_mutex_unlock(&_m_mutex);
}
typedef __native_type* native_handle_type;
native_handle_type native_handle()
{
return &_m_mutex;
};
};
inline int __rt_cpp_recursive_mutex_init(rt_cpp_mutex_t* m)
{
pthread_mutexattr_t attr;
int res;
res = pthread_mutexattr_init(&attr);
if (res)
return res;
res = pthread_mutexattr_settype(&attr, PTHREAD_MUTEX_RECURSIVE);
if (res)
goto attr_cleanup;
res = pthread_mutex_init(m, &attr);
attr_cleanup:
int err = pthread_mutexattr_destroy(&attr);
return res ? res : err;
}
class __recursive_mutex_base
{
protected:
typedef rt_cpp_mutex_t __native_type;
__native_type _m_recursive_mutex;
__recursive_mutex_base(const __recursive_mutex_base&) = delete;
__recursive_mutex_base& operator=(const __recursive_mutex_base&) = delete;
__recursive_mutex_base()
{
int err = __rt_cpp_recursive_mutex_init(&_m_recursive_mutex);
if (err)
throw_system_error(err, "Recursive mutex failed to construct");
}
~__recursive_mutex_base()
{
pthread_mutex_destroy(&_m_recursive_mutex);
}
};
class recursive_mutex : private __recursive_mutex_base
{
public:
typedef __native_type* native_handle_type;
recursive_mutex() = default;
~recursive_mutex() = default;
recursive_mutex(const recursive_mutex&) = delete;
recursive_mutex& operator=(const recursive_mutex&) = delete;
void lock()
{
int err = pthread_mutex_lock(&_m_recursive_mutex);
if (err)
throw_system_error(err, "recursive_mutex::lock failed");
}
bool try_lock() noexcept
{
return !pthread_mutex_trylock(&_m_recursive_mutex);
}
void unlock() noexcept
{
pthread_mutex_unlock(&_m_recursive_mutex);
}
native_handle_type native_handle()
{ return &_m_recursive_mutex; }
};
#ifdef RT_PTHREAD_TIMED_MUTEX
class timed_mutex;
class recursive_timed_mutex;
#endif // RT_PTHREAD_TIMED_MUTEX
struct defer_lock_t {};
struct try_to_lock_t {};
struct adopt_lock_t {}; // take ownership of a locked mtuex
constexpr defer_lock_t defer_lock { };
constexpr try_to_lock_t try_to_lock { };
constexpr adopt_lock_t adopt_lock { };
template <class Mutex>
class lock_guard
{
public:
typedef Mutex mutex_type;
explicit lock_guard(mutex_type& m) : pm(m) { pm.lock(); }
lock_guard(mutex_type& m, adopt_lock_t) noexcept : pm(m)
{ }
~lock_guard()
{ pm.unlock(); }
lock_guard(lock_guard const&) = delete;
lock_guard& operator=(lock_guard const&) = delete;
private:
mutex_type& pm;
};
template <class Mutex>
class unique_lock
{
public:
typedef Mutex mutex_type;
unique_lock() noexcept : pm(nullptr), owns(false) { }
explicit unique_lock(mutex_type& m)
: pm(std::addressof(m)), owns(false)
{
lock();
owns = true;
}
unique_lock(mutex_type& m, defer_lock_t) noexcept
: pm(std::addressof(m)), owns(false)
{ }
unique_lock(mutex_type& m, try_to_lock_t) noexcept
: pm(std::addressof(m)), owns(pm->try_lock())
{ }
unique_lock(mutex_type& m, adopt_lock_t) noexcept
: pm(std::addressof(m)), owns(true)
{ }
// any lock-involving timed mutex API is currently only for custom implementations
// the standard ones are not available
template <class Clock, class Duration>
unique_lock(mutex_type& m, const chrono::time_point<Clock, Duration>& abs_time) noexcept
: pm(std::addressof(m)), owns(pm->try_lock_until(abs_time))
{ }
template <class Rep, class Period>
unique_lock(mutex_type& m, const chrono::duration<Rep, Period>& rel_time) noexcept
: pm(std::addressof(m)), owns(pm->try_lock_for(rel_time))
{ }
~unique_lock()
{
if (owns)
unlock();
}
unique_lock(unique_lock const&) = delete;
unique_lock& operator=(unique_lock const&) = delete;
unique_lock(unique_lock&& u) noexcept
: pm(u.pm), owns(u.owns)
{
u.pm = nullptr;
u.owns = false;
}
unique_lock& operator=(unique_lock&& u) noexcept
{
if (owns)
unlock();
unique_lock(std::move(u)).swap(*this);
u.pm = nullptr;
u.owns = false;
return *this;
}
void lock()
{
if (!pm)
throw_system_error(int(errc::operation_not_permitted),
"unique_lock::lock: references null mutex");
else if (owns)
throw_system_error(int(errc::resource_deadlock_would_occur),
"unique_lock::lock: already locked" );
else {
pm->lock();
owns = true;
}
}
bool try_lock()
{
if (!pm)
throw_system_error(int(errc::operation_not_permitted),
"unique_lock::try_lock: references null mutex");
else if (owns)
throw_system_error(int(errc::resource_deadlock_would_occur),
"unique_lock::try_lock: already locked" );
else {
owns = pm->try_lock();
}
return owns;
}
template <class Rep, class Period>
bool try_lock_for(const chrono::duration<Rep, Period>& rel_time)
{
if (!pm)
throw_system_error(int(errc::operation_not_permitted),
"unique_lock::try_lock_for: references null mutex");
else if (owns)
throw_system_error(int(errc::resource_deadlock_would_occur),
"unique_lock::try_lock_for: already locked");
else {
owns = pm->try_lock_for(rel_time);
}
return owns;
}
template <class Clock, class Duration>
bool try_lock_until(const chrono::time_point<Clock, Duration>& abs_time)
{
if (!pm)
throw_system_error(int(errc::operation_not_permitted),
"unique_lock::try_lock_until: references null mutex");
else if (owns)
throw_system_error(int(errc::resource_deadlock_would_occur),
"unique_lock::try_lock_until: already locked");
else {
owns = pm->try_lock_until(abs_time);
}
return owns;
}
void unlock()
{
if (!owns)
throw_system_error(int(errc::operation_not_permitted),
"unique_lock::unlock: not locked");
else {
pm->unlock();
owns = false;
}
}
void swap(unique_lock& u) noexcept
{
std::swap(pm, u.pm);
std::swap(owns, u.owns);
}
mutex_type *release() noexcept
{
mutex_type* ret_mutex = pm;
pm = nullptr;
owns = false;
return ret_mutex;
}
bool owns_lock() const noexcept
{ return owns; }
explicit operator bool() const noexcept
{ return owns_lock(); }
mutex_type* mutex() const noexcept
{ return pm; }
private:
mutex_type *pm;
bool owns;
};
template <class Mutex>
void swap(unique_lock<Mutex>& x, unique_lock<Mutex>& y)
{
x.swap(y);
}
template <class L0, class L1>
int try_lock(L0& l0, L1& l1)
{
unique_lock<L0> u0(l0, try_to_lock); // try to lock the first Lockable
// using unique_lock since we don't want to unlock l0 manually if l1 fails to lock
if (u0.owns_lock())
{
if (l1.try_lock()) // lock the second one
{
u0.release(); // do not let RAII of a unique_lock unlock l0
return -1;
}
else
return 1;
}
return 0;
}
template <class L0, class L1, class L2, class... L3>
int try_lock(L0& l0, L1& l1, L2& l2, L3&... l3)
{
int r = 0;
unique_lock<L0> u0(l0, try_to_lock);
// automatically unlock is done through RAII of unique_lock
if (u0.owns_lock())
{
r = try_lock(l1, l2, l3...);
if (r == -1)
u0.release();
else
++r;
}
return r;
}
template <class L0, class L1, class L2, class ...L3>
void
__lock_first(int i, L0& l0, L1& l1, L2& l2, L3&... l3)
{
while (true)
{
// we first lock the one that is the most difficult to lock
switch (i)
{
case 0:
{
unique_lock<L0> u0(l0);
i = try_lock(l1, l2, l3...);
if (i == -1)
{
u0.release();
return;
}
}
++i;
sched_yield();
break;
case 1:
{
unique_lock<L1> u1(l1);
i = try_lock(l2, l3..., l0);
if (i == -1)
{
u1.release();
return;
}
}
if (i == sizeof...(L3) + 1) // all except l0 are locked
i = 0;
else
i += 2; // since i was two-based above
sched_yield();
break;
default:
__lock_first(i - 2, l2, l3..., l0, l1);
return;
}
}
}
template <class L0, class L1>
void lock(L0& l0, L1& l1)
{
while (true)
{
{
unique_lock<L0> u0(l0);
if (l1.try_lock())
{
u0.release();
break;
}
}
sched_yield();
// wait and try the other way
{
unique_lock<L1> u1(l1);
if (l0.try_lock())
{
u1.release();
break;
}
}
sched_yield();
}
}
template <class L0, class L1, class... L2>
void lock(L0& l0, L1& l1, L2&... l2)
{
__lock_first(0, l0, l1, l2...);
}
struct once_flag
{
constexpr once_flag() noexcept = default;
once_flag(const once_flag&) = delete;
once_flag& operator=(const once_flag&) = delete;
template <class Callable, class... Args>
friend void call_once(once_flag& flag, Callable&& func, Args&&... args);
private:
pthread_once_t _m_once = PTHREAD_ONCE_INIT;
};
mutex& get_once_mutex();
extern function<void()> once_functor;
extern void set_once_functor_lock_ptr(unique_lock<mutex>*);
extern "C" void once_proxy(); // passed into pthread_once
template <class Callable, class... Args>
void call_once(once_flag& flag, Callable&& func, Args&&... args)
{
// use a lock to ensure the call to the functor
// is exclusive to only the first calling thread
unique_lock<mutex> functor_lock(get_once_mutex());
auto call_wrapper = std::bind(std::forward<Callable>(func), std::forward<Args>(args)...);
once_functor = [&]() { call_wrapper(); };
set_once_functor_lock_ptr(&functor_lock); // so as to unlock when actually calling
int err = pthread_once(&flag._m_once, &once_proxy);
if (functor_lock)
set_once_functor_lock_ptr(nullptr);
if (err)
throw_system_error(err, "call_once failed");
}
}
//#endif // (RT_USING_LIBC) && (RT_USING_PTHREADS)
\ No newline at end of file
components/cplusplus/cpp11/gcc/mutex.cpp
0 → 100644
浏览文件 @
1cb19e59
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-04-27 flybreak the first version.
*/
#include "mutex"
namespace
std
{
// use a set of global and static objects
// a proxy function to pthread_once
function
<
void
()
>
once_functor
;
mutex
&
get_once_mutex
()
{
static
mutex
once_mutex
;
return
once_mutex
;
}
inline
unique_lock
<
mutex
>*&
get_once_functor_lock_ptr
()
{
static
unique_lock
<
mutex
>*
once_functor_mutex_ptr
=
nullptr
;
return
once_functor_mutex_ptr
;
}
void
set_once_functor_lock_ptr
(
unique_lock
<
mutex
>*
m_ptr
)
{
get_once_functor_lock_ptr
()
=
m_ptr
;
}
extern
"C"
{
void
once_proxy
()
{
// need to first transfer the functor's ownership so as to call it
function
<
void
()
>
once_call
=
std
::
move
(
once_functor
);
// no need to hold the lock anymore
unique_lock
<
mutex
>*
lock_ptr
=
get_once_functor_lock_ptr
();
get_once_functor_lock_ptr
()
=
nullptr
;
lock_ptr
->
unlock
();
once_call
();
}
}
}
components/cplusplus/cpp11/gcc/thread
0 → 100644
浏览文件 @
1cb19e59
#pragma once
#if __cplusplus < 201103L
#error "C++ version lower than C++11"
#endif
//#if defined(RT_USING_LIBC) && defined(RT_USING_PTHREADS)
#include <unistd.h>
#include <pthread.h>
#include <sched.h>
#include <rtthread.h>
#include <cstddef>
#include <cerrno>
#include <ostream>
#include <functional>
#include <utility>
#include <chrono>
#include <memory>
#define rt_cpp_thread_t pthread_t
#ifndef PTHREAD_NUM_MAX
#define PTHREAD_NUM_MAX 32
#endif
#define CPP_UNJOINABLE_THREAD PTHREAD_NUM_MAX
namespace std
{
#define __STDCPP_THREADS__ __cplusplus
class thread
{
public:
typedef rt_cpp_thread_t native_handle_type;
struct invoker_base;
typedef shared_ptr<invoker_base> invoker_base_ptr;
class id
{
// basically a wrapper around native_handle_type
native_handle_type __cpp_thread_t;
public:
id() noexcept : __cpp_thread_t(CPP_UNJOINABLE_THREAD) {}
explicit id(native_handle_type hid)
: __cpp_thread_t(hid) {}
private:
friend class thread;
friend class hash<thread::id>;
friend bool operator==(thread::id x, thread::id y) noexcept;
friend bool operator<(thread::id x, thread::id y) noexcept;
template <class charT, class traits>
friend basic_ostream<charT, traits>&
operator<<(basic_ostream<charT, traits>& out, thread::id id);
};
thread() noexcept = default;
thread(const thread&) = delete;
thread& operator=(const thread&) = delete;
~thread();
template <class F, class ...Args>
explicit thread(F&& f, Args&&... args)
{
start_thread(make_invoker_ptr(std::bind(
std::forward<F>(f),
std::forward<Args>(args)...
)));
}
thread(thread&& t) noexcept
{
swap(t);
}
thread& operator=(thread&& t) noexcept
{
if (joinable())
terminate();
swap(t);
return *this;
}
// member functions
void swap(thread& t) noexcept
{
std::swap(_m_thr, t._m_thr);
}
bool joinable() const noexcept
{
return (_m_thr.__cpp_thread_t < PTHREAD_NUM_MAX);
}
void join();
void detach();
id get_id() const noexcept { return _m_thr; }
native_handle_type native_handle() { return _m_thr.__cpp_thread_t; }
// static members
static unsigned hardware_concurrency() noexcept;
private:
id _m_thr;
void start_thread(invoker_base_ptr b);
public:
struct invoker_base
{
invoker_base_ptr this_ptr;
virtual ~invoker_base() = default;
virtual void invoke() = 0;
};
template<typename Callable>
struct invoker : public invoker_base
{
Callable func;
invoker(Callable&& F) : func(std::forward<Callable>(F)) { }
void invoke() { func(); }
};
template <typename Callable>
shared_ptr<invoker<Callable>> make_invoker_ptr(Callable&& F)
{
return std::make_shared<invoker<Callable>>(std::forward<Callable>(F));
}
};
inline void swap(thread& x, thread& y) noexcept
{
x.swap(y);
}
inline bool operator==(thread::id x, thread::id y) noexcept
{
// From POSIX for pthread_equal:
//"If either t1 or t2 are not valid thread IDs, the behavior is undefined."
return x.__cpp_thread_t == y.__cpp_thread_t;
}
inline bool operator!=(thread::id x, thread::id y) noexcept
{
return !(x == y);
}
inline bool operator<(thread::id x, thread::id y) noexcept
{
return x.__cpp_thread_t < y.__cpp_thread_t;
}
inline bool operator<=(thread::id x, thread::id y) noexcept
{
return !(y < x);
}
inline bool operator>(thread::id x, thread::id y) noexcept
{
return !(x <= y);
}
inline bool operator>=(thread::id x, thread::id y) noexcept
{
return !(x < y);
}
template <class charT, class traits>
inline basic_ostream<charT, traits>&
operator<<(basic_ostream<charT, traits>& out, thread::id id)
{
if (id == thread::id()) // id is invalid, representing no pthread
out << "thread::id of a non-executing thread";
else
out << id.__cpp_thread_t;
return out;
}
template <>
struct hash<thread::id>
{
typedef size_t result_type;
typedef thread::id argument_type;
size_t operator()(const thread::id& id) const noexcept
{
return hash<rt_cpp_thread_t>()(id.__cpp_thread_t);
}
};
namespace this_thread
{
inline thread::id get_id() noexcept
{
return thread::id(pthread_self());
}
inline void yield() noexcept
{
sched_yield();
}
template <class Rep, class Period>
inline void sleep_for(const chrono::duration<Rep, Period>& rel_time)
{
if (rel_time <= rel_time.zero()) // less than zero, no need to sleep
return;
auto milli_secs = chrono::duration_cast<chrono::milliseconds>(rel_time);
// the precision is limited by rt-thread thread API
rt_thread_mdelay(milli_secs.count());
}
template <class Clock, class Duration>
inline void sleep_until(const chrono::time_point<Clock, Duration>& abs_time)
{
auto now = Clock::now();
if (abs_time > now)
sleep_for(abs_time - now);
}
}
}
components/cplusplus/cpp11/gcc/thread.cpp
0 → 100644
浏览文件 @
1cb19e59
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-04-27 flybreak the first version.
*/
#include "thread"
#include "__utils.h"
#define _RT_NPROCS 0
namespace
std
{
extern
"C"
{
static
void
*
execute_native_thread_routine
(
void
*
p
)
{
thread
::
invoker_base
*
t
=
static_cast
<
thread
::
invoker_base
*>
(
p
);
thread
::
invoker_base_ptr
local
;
local
.
swap
(
t
->
this_ptr
);
// tranfer the ownership of the invoker into the thread entry
local
->
invoke
();
return
NULL
;
}
}
void
thread
::
start_thread
(
invoker_base_ptr
b
)
{
auto
raw_ptr
=
b
.
get
();
// transfer the ownership of the invoker to the new thread
raw_ptr
->
this_ptr
=
std
::
move
(
b
);
int
err
=
pthread_create
(
&
_m_thr
.
__cpp_thread_t
,
NULL
,
&
execute_native_thread_routine
,
raw_ptr
);
if
(
err
)
{
raw_ptr
->
this_ptr
.
reset
();
throw_system_error
(
err
,
"Failed to create a thread"
);
}
}
thread
::~
thread
()
{
if
(
joinable
())
// when either not joined or not detached
terminate
();
}
void
thread
::
join
()
{
int
err
=
EINVAL
;
if
(
joinable
())
err
=
pthread_join
(
native_handle
(),
NULL
);
if
(
err
)
{
throw_system_error
(
err
,
"thread::join failed"
);
}
_m_thr
=
id
();
}
void
thread
::
detach
()
{
int
err
=
EINVAL
;
if
(
joinable
())
err
=
pthread_detach
(
native_handle
());
if
(
err
)
{
throw_system_error
(
err
,
"thread::detach failed"
);
}
_m_thr
=
id
();
}
// TODO: not yet actually implemented.
// The standard states that the returned value should only be considered a hint.
unsigned
thread
::
hardware_concurrency
()
noexcept
{
int
__n
=
_RT_NPROCS
;
if
(
__n
<
0
)
__n
=
0
;
return
__n
;
}
}
components/cplusplus/cpp11/gcc/utils.cpp
0 → 100644
浏览文件 @
1cb19e59
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-04-27 flybreak the first version.
*/
#include "__utils.h"
#include <sys/time.h>
tick_clock
::
time_point
tick_clock
::
now
()
{
tick_clock
::
rep
cur_tk
=
clock
();
tick_clock
::
duration
cur_time
(
cur_tk
);
return
tick_clock
::
time_point
(
cur_time
);
}
real_time_clock
::
time_point
real_time_clock
::
now
()
noexcept
{
timespec
tp
;
clock_gettime
(
CLOCK_REALTIME
,
&
tp
);
return
time_point
(
duration
(
std
::
chrono
::
seconds
(
tp
.
tv_sec
))
+
std
::
chrono
::
nanoseconds
(
tp
.
tv_nsec
));
}
components/cplusplus/cpp11/thread_local_impl.cpp
0 → 100644
浏览文件 @
1cb19e59
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-04-27 flybreak the first version.
*/
#include <pthread.h>
#include <cstdlib>
typedef
void
(
*
destructor
)
(
void
*
);
extern
"C"
int
__cxa_thread_atexit_impl
(
destructor
dtor
,
void
*
obj
,
void
*
dso_symbol
)
{
pthread_key_t
key_tmp
;
if
(
pthread_key_create
(
&
key_tmp
,
dtor
)
!=
0
)
abort
();
pthread_setspecific
(
key_tmp
,
obj
);
return
0
;
}
#if defined(__GNUC__) && !defined(__ARMCC_VERSION)
/*GCC*/
#include <cxxabi.h>
extern
"C"
int
__cxxabiv1
::
__cxa_thread_atexit
(
destructor
dtor
,
void
*
obj
,
void
*
dso_handle
)
{
return
__cxa_thread_atexit_impl
(
dtor
,
obj
,
dso_handle
);
}
#endif
components/libc/compilers/common/nogcc/sys/types.h
浏览文件 @
1cb19e59
...
...
@@ -27,6 +27,7 @@ typedef signed int ssize_t; /* Used for a count of bytes or an error
#else
typedef
long
signed
int
ssize_t
;
/* Used for a count of bytes or an error indication. */
#endif
typedef
long
suseconds_t
;
/* microseconds. */
typedef
unsigned
long
useconds_t
;
/* microseconds (unsigned) */
typedef
unsigned
long
dev_t
;
...
...
components/libc/compilers/common/sys/time.h
浏览文件 @
1cb19e59
...
...
@@ -48,9 +48,10 @@ rt_int8_t rt_tz_is_dst(void);
#ifndef _TIMEVAL_DEFINED
#define _TIMEVAL_DEFINED
#if !(defined(_WIN32))
struct
timeval
{
long
tv_sec
;
/* seconds */
long
tv_usec
;
/* and microseconds */
struct
timeval
{
time_t
tv_sec
;
/* seconds */
suseconds_t
tv_usec
;
/* and microseconds */
};
#endif
#endif
/* _TIMEVAL_DEFINED */
...
...
components/libc/pthreads/pthread.c
浏览文件 @
1cb19e59
...
...
@@ -90,9 +90,30 @@ void _pthread_data_destroy(pthread_t pth)
{
RT_DECLARE_SPINLOCK
(
pth_lock
);
extern
_pthread_key_data_t
_thread_keys
[
PTHREAD_KEY_MAX
];
_pthread_data_t
*
ptd
=
_pthread_get_data
(
pth
);
if
(
ptd
)
{
/* destruct thread local key */
if
(
ptd
->
tls
!=
RT_NULL
)
{
void
*
data
;
rt_uint32_t
index
;
for
(
index
=
0
;
index
<
PTHREAD_KEY_MAX
;
index
++
)
{
if
(
_thread_keys
[
index
].
is_used
)
{
data
=
ptd
->
tls
[
index
];
if
(
data
&&
_thread_keys
[
index
].
destructor
)
_thread_keys
[
index
].
destructor
(
data
);
}
}
/* release tls area */
rt_free
(
ptd
->
tls
);
ptd
->
tls
=
RT_NULL
;
}
/* remove from pthread table */
rt_hw_spin_lock
(
&
pth_lock
);
pth_table
[
pth
]
=
NULL
;
...
...
@@ -103,13 +124,17 @@ void _pthread_data_destroy(pthread_t pth)
rt_sem_delete
(
ptd
->
joinable_sem
);
/* release thread resource */
if
(
ptd
->
attr
.
stackaddr
==
RT_NULL
&&
ptd
->
tid
->
stack_addr
!=
RT_NULL
)
if
(
ptd
->
attr
.
stackaddr
==
RT_NULL
)
{
/* release thread allocated stack */
rt_free
(
ptd
->
tid
->
stack_addr
);
if
(
ptd
->
tid
)
{
rt_free
(
ptd
->
tid
->
stack_addr
);
}
}
/* clean stack addr pointer */
ptd
->
tid
->
stack_addr
=
RT_NULL
;
if
(
ptd
->
tid
)
ptd
->
tid
->
stack_addr
=
RT_NULL
;
/*
* if this thread create the local thread data,
...
...
@@ -221,6 +246,12 @@ int pthread_create(pthread_t *pid,
pthread_attr_init
(
&
ptd
->
attr
);
}
if
(
ptd
->
attr
.
stacksize
==
0
)
{
ret
=
EINVAL
;
goto
__exit
;
}
rt_snprintf
(
name
,
sizeof
(
name
),
"pth%02d"
,
pthread_number
++
);
/* pthread is a static thread object */
...
...
@@ -269,7 +300,7 @@ int pthread_create(pthread_t *pid,
/* initial this pthread to system */
if
(
rt_thread_init
(
ptd
->
tid
,
name
,
pthread_entry_stub
,
ptd
,
stack
,
ptd
->
attr
.
stacksize
,
ptd
->
attr
.
schedparam
.
sched_priority
,
5
)
!=
RT_EOK
)
ptd
->
attr
.
schedparam
.
sched_priority
,
20
)
!=
RT_EOK
)
{
ret
=
EINVAL
;
goto
__exit
;
...
...
@@ -460,7 +491,7 @@ void pthread_exit(void *value)
if
(
_thread_keys
[
index
].
is_used
)
{
data
=
ptd
->
tls
[
index
];
if
(
data
)
if
(
data
&&
_thread_keys
[
index
].
destructor
)
_thread_keys
[
index
].
destructor
(
data
);
}
}
...
...
@@ -507,14 +538,21 @@ int pthread_kill(pthread_t thread, int sig)
{
#ifdef RT_USING_SIGNALS
_pthread_data_t
*
ptd
;
int
ret
;
ptd
=
_pthread_get_data
(
thread
);
if
(
ptd
)
{
return
rt_thread_kill
(
ptd
->
tid
,
sig
);
ret
=
rt_thread_kill
(
ptd
->
tid
,
sig
);
if
(
ret
==
-
RT_EINVAL
)
{
return
EINVAL
;
}
return
ret
;
}
return
E
INVAL
;
return
E
SRCH
;
#else
return
ENOSYS
;
#endif
...
...
@@ -707,3 +745,4 @@ int pthread_cancel(pthread_t thread)
return
0
;
}
RTM_EXPORT
(
pthread_cancel
);
components/libc/pthreads/pthread.h
浏览文件 @
1cb19e59
...
...
@@ -265,6 +265,11 @@ int pthread_barrier_init(pthread_barrier_t *barrier,
int
pthread_barrier_wait
(
pthread_barrier_t
*
barrier
);
int
pthread_setspecific
(
pthread_key_t
key
,
const
void
*
value
);
void
*
pthread_getspecific
(
pthread_key_t
key
);
int
pthread_key_create
(
pthread_key_t
*
key
,
void
(
*
destructor
)(
void
*
));
int
pthread_key_delete
(
pthread_key_t
key
);
#ifdef __cplusplus
}
#endif
...
...
编辑
预览
Markdown
is supported
0%
请重试
或
添加新附件
.
添加附件
取消
You are about to add
0
people
to the discussion. Proceed with caution.
先完成此消息的编辑!
取消
想要评论请
注册
或
登录
{kind=link}