【Fluid models】implement DQN model (#889)
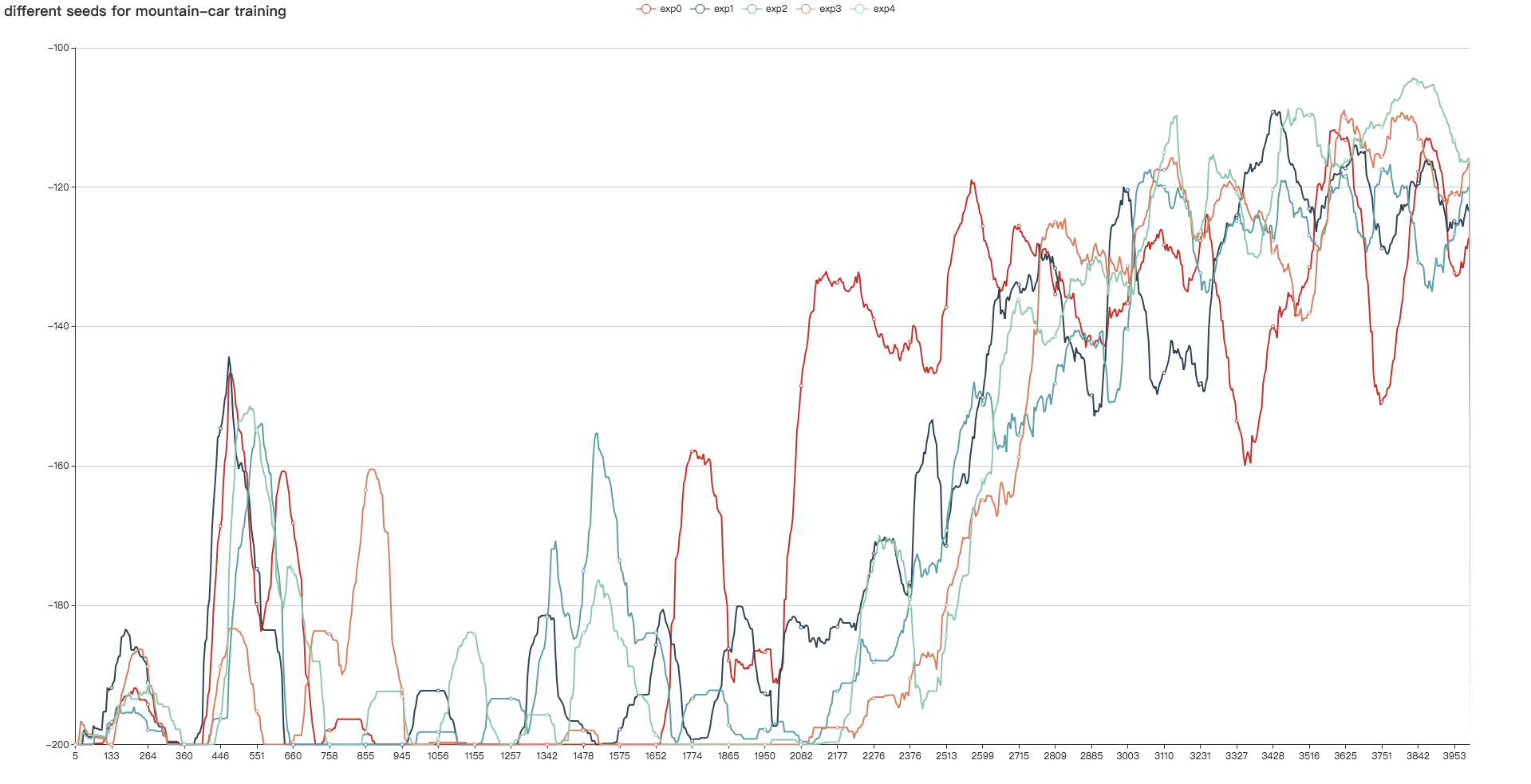
* [DQN]source code commit * Update README.md * Update README.md * add mountain-car curve * Update README.md * Update README.md * clean code * fix code style * [fix code style]/2 * remove some tensorflow package * a better way to sample from replay memory * code style
Showing
fluid/DeepQNetwork/DQN.py
0 → 100644
fluid/DeepQNetwork/README.md
0 → 100644
fluid/DeepQNetwork/agent.py
0 → 100644
fluid/DeepQNetwork/curve.png
0 → 100644
{kind=link}
442.3 KB
fluid/DeepQNetwork/expreplay.py
0 → 100644
{kind=link}
98.6 KB