[PointNet++](https://arxiv.org/abs/1706.02413) 是 Charles R. Qi, Li Yi, Hao Su, Leonidas J. Guibas 等人提出的,针对3D数据进行分类和语义分割的模型。该模型基于PointNet进行了拓展, 使用分层点集特征学习来提取点云数据的特征,首先通过对输入point进行分组和采样提取局部区域模式,然后使用多层感知器来获取点特征。PointNet++ 还将点特征传播用于语义分割模型,采用基于距离插值和跨级跳转连接的分层传播策略,对点特征进行向上采样,获得所有原始点的点特征。
-[PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space](https://arxiv.org/abs/1706.02413), Charles R. Qi, Li Yi, Hao Su, Leonidas J. Guibas.
-[PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation](https://www.semanticscholar.org/paper/PointNet%3A-Deep-Learning-on-Point-Sets-for-3D-and-Qi-Su/d997beefc0922d97202789d2ac307c55c2c52fba), Charles Ruizhongtai Qi, Hao Su, Kaichun Mo, Leonidas J. Guibas.
# PointNet++ classification and semantic segmentation model
---
## Table of Contents
-[Introduction](#introduction)
-[Quick Start](#quick-start)
-[Reference](#reference)
-[Update](#update)
## Introduction
[PointNet++](https://arxiv.org/abs/1706.02413) is a point classification and segmentation model for 3D data proposed by Charles R. Qi, Li Yi, Hao Su, Leonidas J. Guibas.
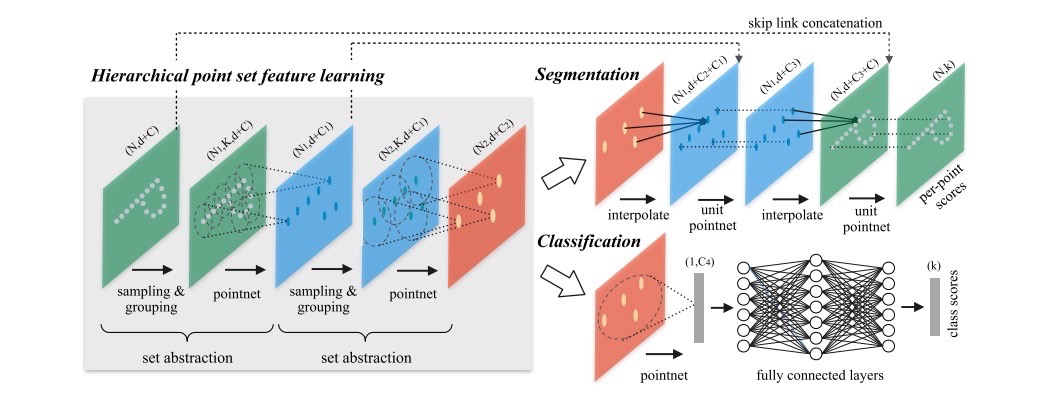
This model is a extension work based on PointNet extract features of point clouds data with hierarchical point set feature learning, perform set abstractions by grouping and sampling points at first to extract
local region patterns, then use multi-layer perceptron to get point features. PointNet++ also used point feature propagation for semantic segmentation model, adopt a hierarchical
propagation strategy with distance based interpolation and across level skip links, point features was upsampled to obtain point features for all the original points.
PointNet++ architecture for Point set Segmentation and Classification
</p>
Set Abstraction layer is the basic module of the network, each set abstraction layer is made of three key layers:Sampling layer, Grouping layer and PointNet layer.
-**Sample layer**: Sampling layer uses farthest point sampling(FPS) to select a set of points from input points, which defines the centroids of local regions. Compared with random sampling, it has better converage of the entire point set given the same number of centroids.
-**Grouping layer**: Grouping layer constructs local region sets by finding "neighboring" points around the centroids. In a point set sampled from a metric space, the neighborhood of a point is defined by metric distance. This method is called "ball query", which make local region feature more generalizable across space.
-**PointNet layer**: PointNet layer uses a mini-PointNet to encode local region patterns into feature vectors.
**NOTE:** PointNet++ model builds base on custom C++ operations, which can only support GPU devices and compiled on Linux/Unix currently, this model **cannot run on Windows or CPU deivices**.
Running sample code in this directory requires PaddelPaddle Fluid develop [daily version wheel](https://www.paddlepaddle.org.cn/install/doc/tables#多版本whl包列表-dev-11) or compiled from PaddlePaddle [develop branch](https://github.com/PaddlePaddle/Paddle/tree/develop).
In order to make the custom OP compatible with the Paddle version, it is recommended to **compile from PaddlePaddle develop branch source code**. For source code compilation, please refer to [Compile and Install](https://www.paddlepaddle.org.cn/install/doc/source/ubuntu)
### Compile custom operations
Please make sure you are using PaddlePaddle Fluid develop daily version or compiled from PaddlePaddle develop branch.
Custom operations can be compiled as follows:
```
cd ext_op/src
sh make.sh
```
If the compilation is finished successfully, `pointnet2_lib.so` will be generated under `exr_op/src`.
Make sure custom operations pass as follows:
```
# export paddle libs to LD_LIBRARY_PATH for custom op library
PointNet++ classification models are trained on [ModelNet40 dataset](https://shapenet.cs.stanford.edu/media/modelnet40_ply_hdf5_2048.zip), we also provide download scripts as follows:
```
cd dataset/ModelNet40
sh download.sh
```
The dataset catalog structure is as follows:
```
dataset/ModelNet40/modelnet40_ply_hdf5_2048
├── train_files.txt
├── test_files.txt
├── shape_names.txt
├── ply_data_train0.h5
├── ply_data_train_0_id2file.json
├── ply_data_test0.h5
├── ply_data_test_0_id2file.json
| ...
```
**Indoor3DSemSeg dataset:**
PointNet++ semantic segmentation models are trained on [Indoor3DSemSeg dataset](https://shapenet.cs.stanford.edu/media/indoor3d_sem_seg_hdf5_data.zip), we also provide download scripts as follows:
```
cd dataset/Indoor3DSemSeg
sh download.sh
```
The dataset catalog structure is as follows:
```
dataset/Indoor3DSemSeg/
├── all_files.txt
├── room_filelist.txt
├── ply_data_all_0.h5
├── ply_data_all_1.h5
| ...
```
### Training
**Classification Model:**
For PointNet++ classification model, training can be start as follows:
```
# For single GPU deivces
export CUDA_VISIBLE_DEVICES=0
# enable gc to save GPU memory
export FLAGS_fast_eager_deletion_mode=1
export FLAGS_eager_delete_tensor_gb=0.0
export FLAGS_fraction_of_gpu_memory_to_use=0.98
# export paddle libs to LD_LIBRARY_PATH for custom op library
We also provided quick start scripts for training semantic segmentation model as follows:
```
sh scripts/eval_seg.sh
```
Semantic segmentation model evaluation result is shown as below:
| model | Top-1 | download |
| :----- | :---: | :---: |
| SSG(Single-Scale Group) | 86.1 | [model]() |
| MSG(Multi-Scale Group) | 86.8 | [model]() |
## Reference
-[PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space](https://arxiv.org/abs/1706.02413), Charles R. Qi, Li Yi, Hao Su, Leonidas J. Guibas.
-[PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation](https://www.semanticscholar.org/paper/PointNet%3A-Deep-Learning-on-Point-Sets-for-3D-and-Qi-Su/d997beefc0922d97202789d2ac307c55c2c52fba), Charles Ruizhongtai Qi, Hao Su, Kaichun Mo, Leonidas J. Guibas.
## Update
- 11/2019, Add PointNet++ classification and semantic segmentation model.
{kind=link}