PaddlePaddle Fast ImageNet can train ImageNet dataset with fewer epochs. We implemented the it according to the blog
[Now anyone can train Imagenet in 18 minutes](https://www.fast.ai/2018/08/10/fastai-diu-imagenet/) which published on the [fast.ai] website.
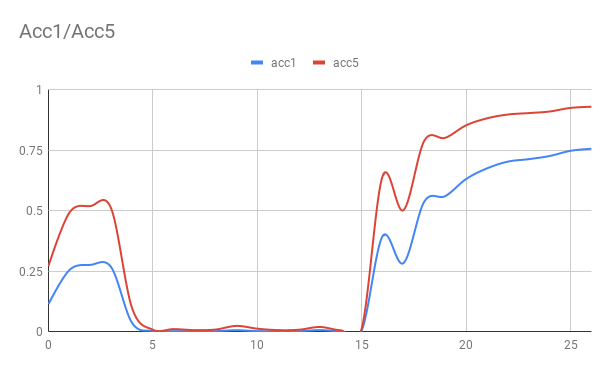
PaddlePaddle Fast ImageNet using the dynmiac batch size, dynamic image size, rectangular images validation and etc... so that the Fast ImageNet can achieve the baseline
(acc1: 75%, acc5: 93%) by 27 epochs on 8 * V100 GPUs.
## Experiment
1. Prepare the training data, resize the images to 160 and 352 using `resize.py`, the prepared data folder should look like:
``` text
`-ImageNet
|-train
|-validation
|-160
|-train
`-validation
`-352
|-train
`-validation
```
1. Install the requirements by `pip install -r requirement.txt`.
1. Launch the training job: `python train.py --data_dir /data/imagenet`
1. Learning curve, we launch the training job on V100 GPU card:
{kind=link}