add infer and dataset
Showing
yolov3/colormap.py
0 → 100644
yolov3/dataset/voc/download.py
0 → 100644
yolov3/image/YOLOv3.jpg
0 → 100644
{kind=link}
68.4 KB
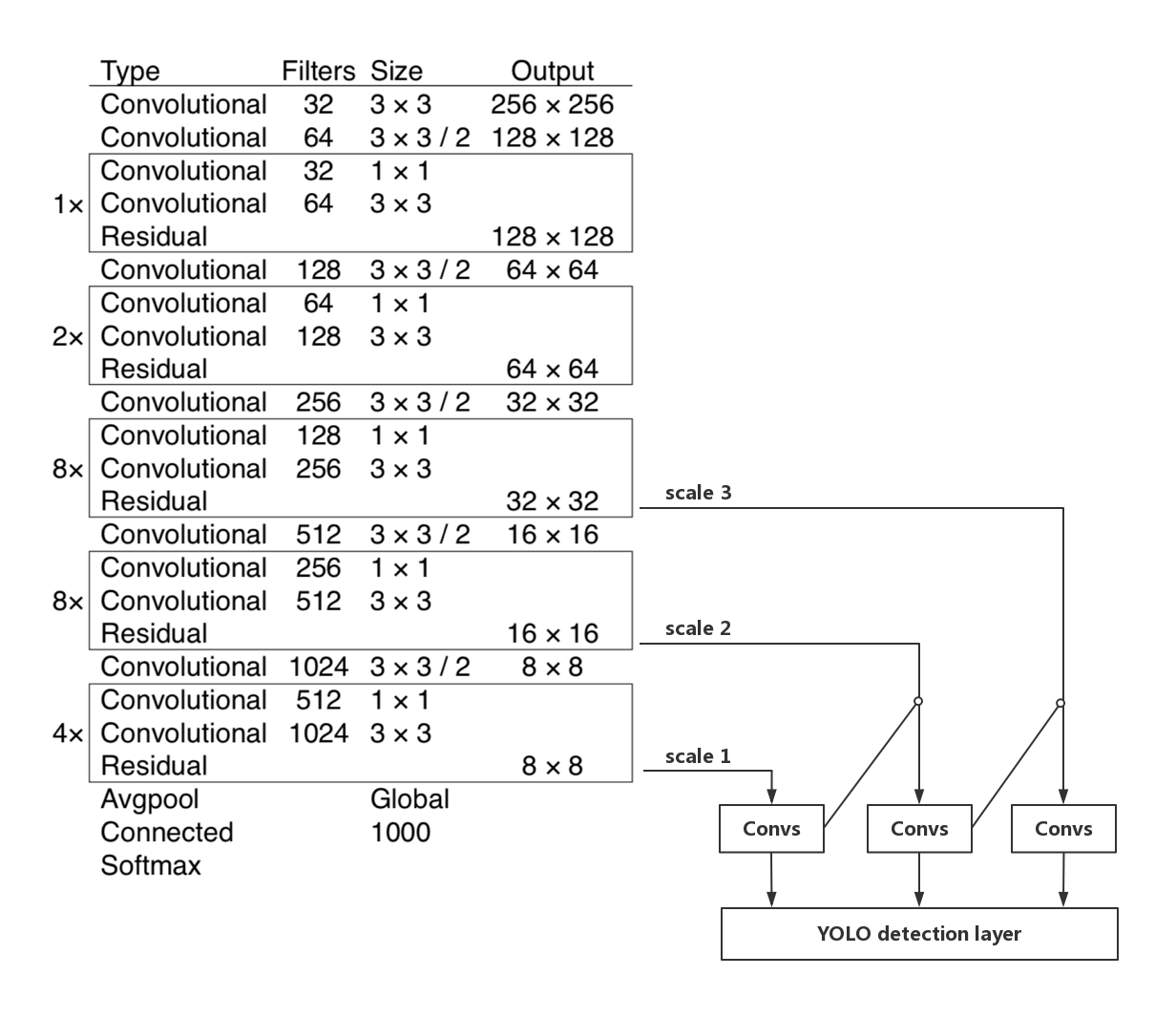
yolov3/image/YOLOv3_structure.jpg
0 → 100644
{kind=link}
288.4 KB
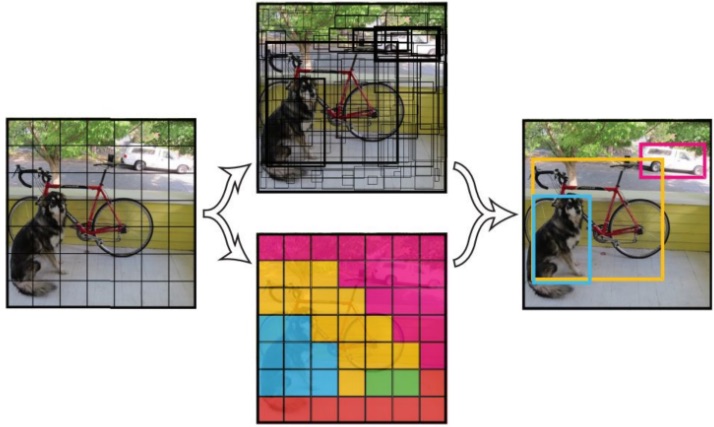
yolov3/image/dog.jpg
0 → 100644
{kind=link}

159.9 KB
yolov3/infer.py
0 → 100644
yolov3/visualizer.py
0 → 100644