Add gan for book repo (#695)
* add gan for book * fix some typo * Update README.cn.md * modified html * fix some description * optimized the readme * fixed reference
Showing
09.gan/README.cn.md
0 → 100644
09.gan/dc_gan.py
0 → 100644
09.gan/image/dcgan_demo.png
0 → 100644
{kind=link}

164.0 KB
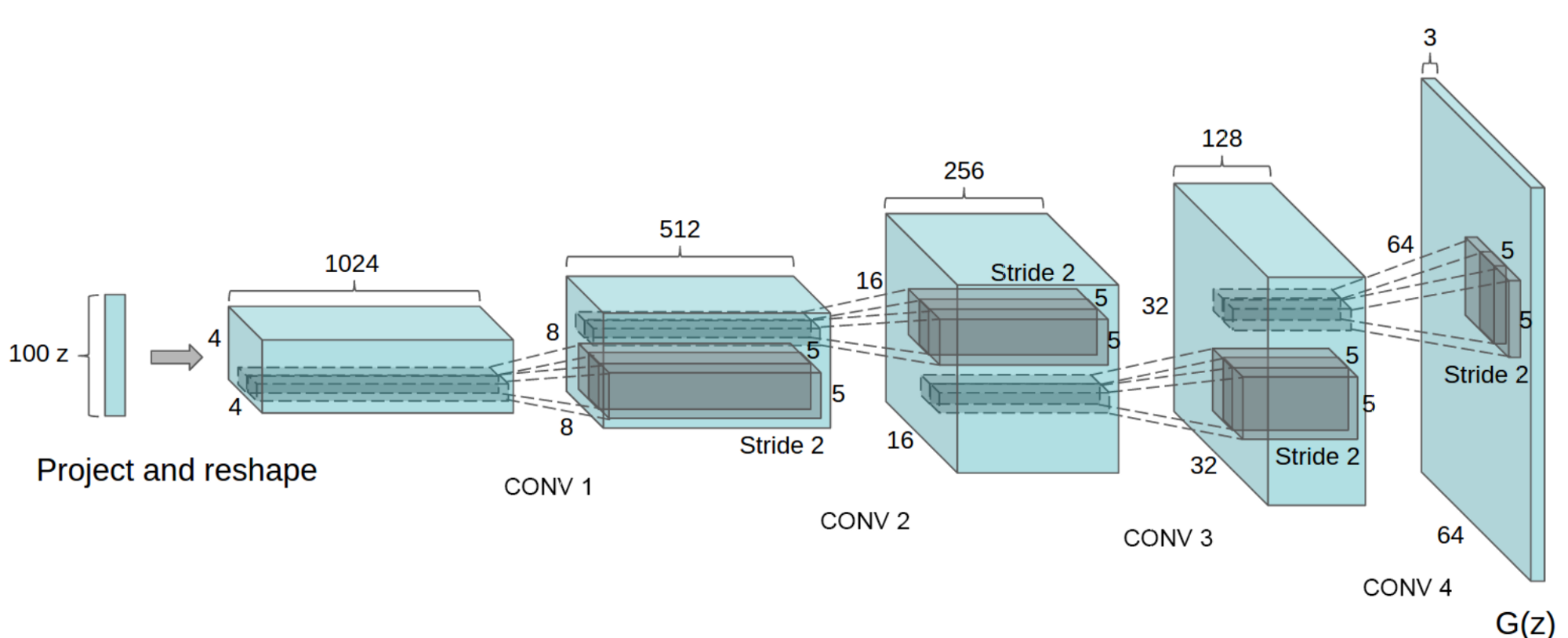
09.gan/image/dcgan_g.png
0 → 100644
{kind=link}
231.8 KB
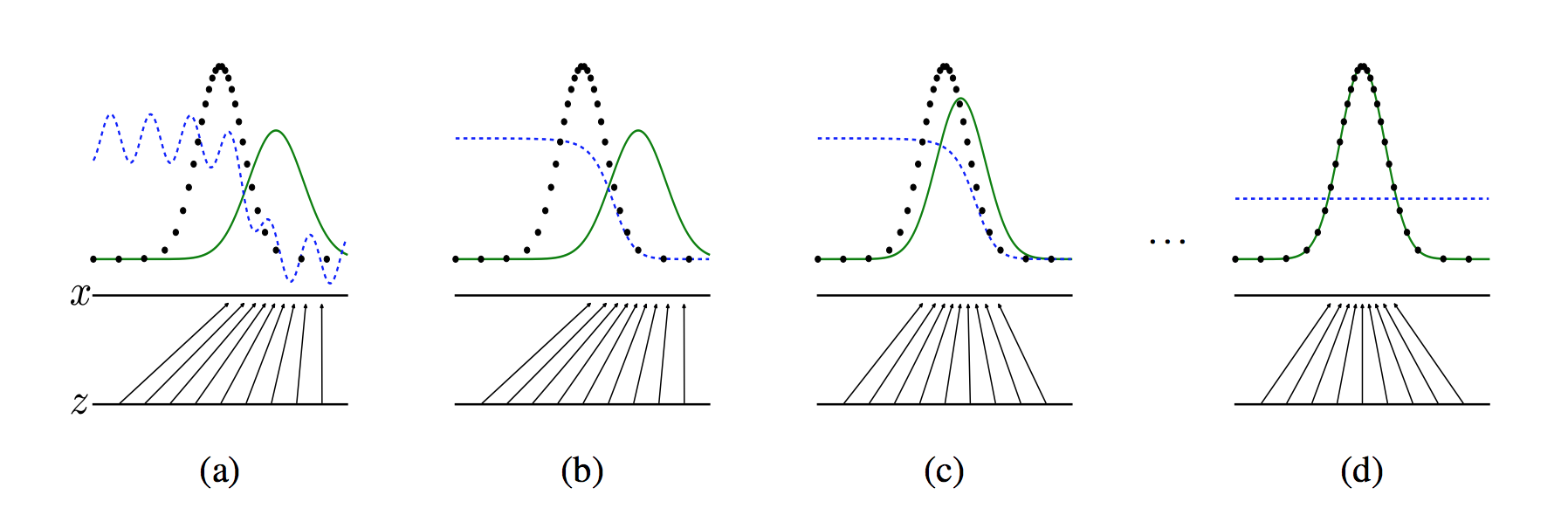
09.gan/image/process.png
0 → 100644
{kind=link}
131.0 KB
09.gan/index.cn.html
0 → 100644
此差异已折叠。
09.gan/network.py
0 → 100644
09.gan/utility.py
0 → 100644