Skip to content
体验新版
项目
组织
正在加载...
登录
切换导航
打开侧边栏
PaddlePaddle
PaddleX
提交
39347594
P
PaddleX
项目概览
PaddlePaddle
/
PaddleX
通知
138
Star
4
Fork
0
代码
文件
提交
分支
Tags
贡献者
分支图
Diff
Issue
43
列表
看板
标记
里程碑
合并请求
5
Wiki
0
Wiki
分析
仓库
DevOps
项目成员
Pages
P
PaddleX
项目概览
项目概览
详情
发布
仓库
仓库
文件
提交
分支
标签
贡献者
分支图
比较
Issue
43
Issue
43
列表
看板
标记
里程碑
合并请求
5
合并请求
5
Pages
分析
分析
仓库分析
DevOps
Wiki
0
Wiki
成员
成员
收起侧边栏
关闭侧边栏
动态
分支图
创建新Issue
提交
Issue看板
提交
39347594
编写于
7月 10, 2020
作者:
F
FlyingQianMM
浏览文件
操作
浏览文件
下载
电子邮件补丁
差异文件
modify details
上级
c8d7de2a
变更
24
隐藏空白更改
内联
并排
Showing
24 changed file
with
172 addition
and
141 deletion
+172
-141
deploy/cpp/src/paddlex.cpp
deploy/cpp/src/paddlex.cpp
+12
-14
deploy/cpp/src/transforms.cpp
deploy/cpp/src/transforms.cpp
+2
-4
examples/meter_reader/README.md
examples/meter_reader/README.md
+18
-16
examples/meter_reader/deploy/cpp/CMakeLists.txt
examples/meter_reader/deploy/cpp/CMakeLists.txt
+11
-11
examples/meter_reader/deploy/cpp/meter_reader/global.cpp
examples/meter_reader/deploy/cpp/meter_reader/global.cpp
+1
-1
examples/meter_reader/deploy/cpp/meter_reader/global.h
examples/meter_reader/deploy/cpp/meter_reader/global.h
+0
-0
examples/meter_reader/deploy/cpp/meter_reader/meter_reader.cpp
...les/meter_reader/deploy/cpp/meter_reader/meter_reader.cpp
+33
-15
examples/meter_reader/deploy/cpp/meter_reader/postprocess.cpp
...ples/meter_reader/deploy/cpp/meter_reader/postprocess.cpp
+2
-2
examples/meter_reader/deploy/cpp/meter_reader/postprocess.h
examples/meter_reader/deploy/cpp/meter_reader/postprocess.h
+0
-0
examples/meter_reader/deploy/python/reader_deploy.py
examples/meter_reader/deploy/python/reader_deploy.py
+10
-4
examples/meter_reader/image/MeterReader_Architecture.jpg
examples/meter_reader/image/MeterReader_Architecture.jpg
+0
-0
examples/meter_reader/reader_infer.py
examples/meter_reader/reader_infer.py
+10
-4
examples/meter_reader/train_detection.py
examples/meter_reader/train_detection.py
+16
-6
paddlex/cv/datasets/__init__.py
paddlex/cv/datasets/__init__.py
+1
-1
paddlex/cv/datasets/dataset.py
paddlex/cv/datasets/dataset.py
+20
-7
paddlex/cv/models/classifier.py
paddlex/cv/models/classifier.py
+2
-2
paddlex/cv/models/deeplabv3p.py
paddlex/cv/models/deeplabv3p.py
+3
-12
paddlex/cv/models/faster_rcnn.py
paddlex/cv/models/faster_rcnn.py
+6
-24
paddlex/cv/models/mask_rcnn.py
paddlex/cv/models/mask_rcnn.py
+6
-5
paddlex/cv/models/yolo_v3.py
paddlex/cv/models/yolo_v3.py
+2
-2
paddlex/cv/transforms/cls_transforms.py
paddlex/cv/transforms/cls_transforms.py
+10
-7
paddlex/cv/transforms/det_transforms.py
paddlex/cv/transforms/det_transforms.py
+2
-1
paddlex/cv/transforms/seg_transforms.py
paddlex/cv/transforms/seg_transforms.py
+4
-2
paddlex/deploy.py
paddlex/deploy.py
+1
-1
未找到文件。
deploy/cpp/src/paddlex.cpp
浏览文件 @
39347594
...
...
@@ -599,20 +599,18 @@ bool Model::predict(const cv::Mat& im, SegResult* result) {
inputs_
.
im_size_before_resize_
.
pop_back
();
auto
resize_w
=
before_shape
[
0
];
auto
resize_h
=
before_shape
[
1
];
if
(
mask_label
->
rows
!=
resize_h
||
mask_label
->
cols
!=
resize_w
)
{
cv
::
resize
(
mask_label
,
mask_label
,
cv
::
Size
(
resize_h
,
resize_w
),
0
,
0
,
cv
::
INTER_NEAREST
);
cv
::
resize
(
mask_score
,
mask_score
,
cv
::
Size
(
resize_h
,
resize_w
),
0
,
0
,
cv
::
INTER_NEAREST
);
}
cv
::
resize
(
mask_label
,
mask_label
,
cv
::
Size
(
resize_h
,
resize_w
),
0
,
0
,
cv
::
INTER_NEAREST
);
cv
::
resize
(
mask_score
,
mask_score
,
cv
::
Size
(
resize_h
,
resize_w
),
0
,
0
,
cv
::
INTER_LINEAR
);
}
++
idx
;
}
...
...
deploy/cpp/src/transforms.cpp
浏览文件 @
39347594
...
...
@@ -152,10 +152,8 @@ bool Resize::Run(cv::Mat* im, ImageBlob* data) {
data
->
im_size_before_resize_
.
push_back
({
im
->
rows
,
im
->
cols
});
data
->
reshape_order_
.
push_back
(
"resize"
);
if
(
im
->
rows
!=
height_
||
im
->
cols
!=
width_
)
{
cv
::
resize
(
*
im
,
*
im
,
cv
::
Size
(
width_
,
height_
),
0
,
0
,
interpolations
[
interp_
]);
}
cv
::
resize
(
*
im
,
*
im
,
cv
::
Size
(
width_
,
height_
),
0
,
0
,
interpolations
[
interp_
]);
data
->
new_im_size_
[
0
]
=
im
->
rows
;
data
->
new_im_size_
[
1
]
=
im
->
cols
;
return
true
;
...
...
examples/meter_reader/README.md
浏览文件 @
39347594
...
...
@@ -28,13 +28,13 @@
| 表计测试图片 | 表计检测数据集 | 指针和刻度分割数据集 |
| ------------------------------------------------------------ | ------------------------------------------------------------ | ------------------------------------------------------------ |
|
[
meter_test
](
https://bj.bcebos.com/paddlex/
meterreader/datasets/meter_test.tar.gz
)
|
[
meter_det
](
https://bj.bcebos.com/paddlex/meterreader/datasets/meter_det.tar.gz
)
|
[
meter_seg
](
https://bj.bcebos.com/paddlex/meter
reader/datasets/meter_seg.tar.gz
)
|
|
[
meter_test
](
https://bj.bcebos.com/paddlex/
examples/meter_reader/datasets/meter_test.tar.gz
)
|
[
meter_det
](
https://bj.bcebos.com/paddlex/examples/meter_reader/datasets/meter_det.tar.gz
)
|
[
meter_seg
](
https://bj.bcebos.com/paddlex/examples/meter_
reader/datasets/meter_seg.tar.gz
)
|
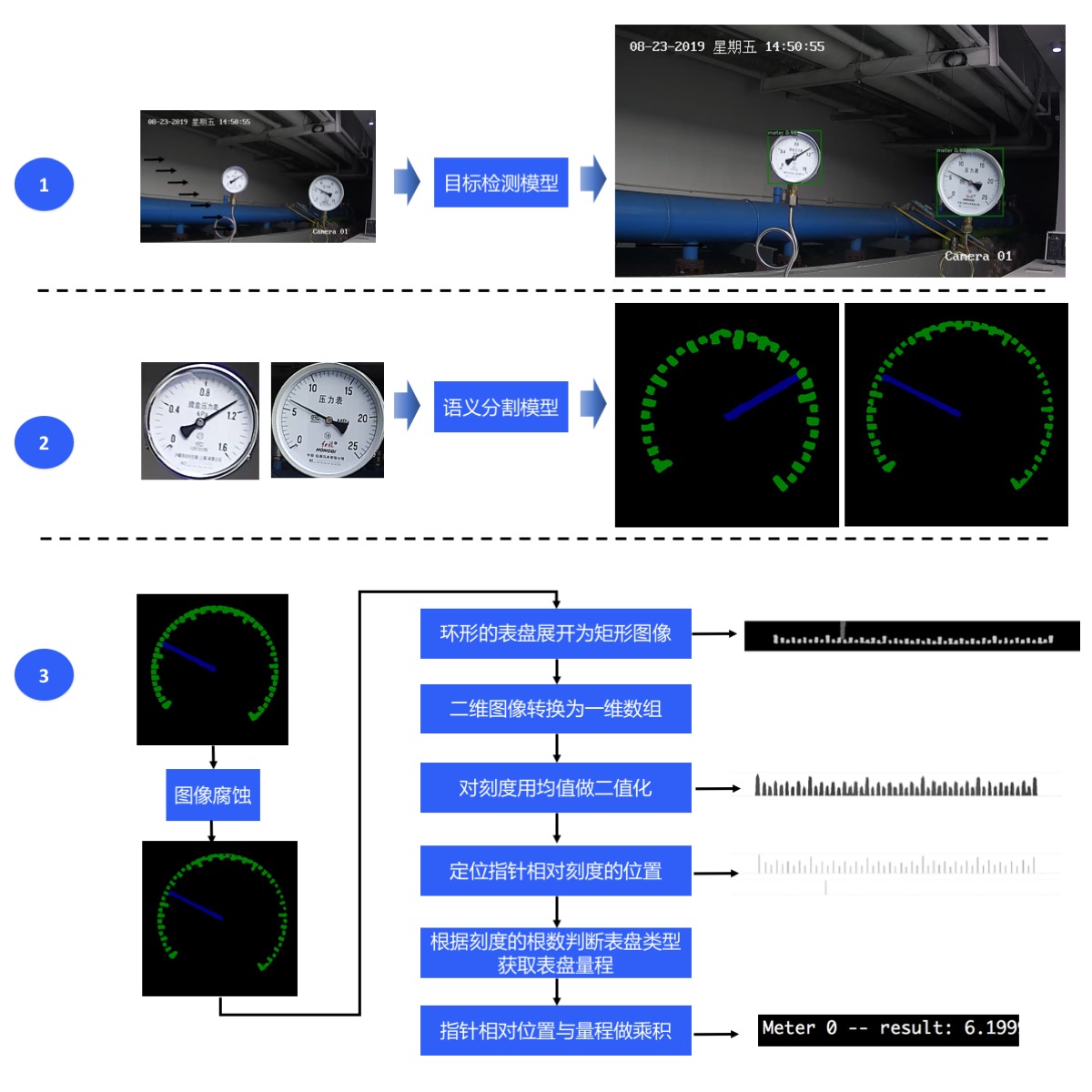
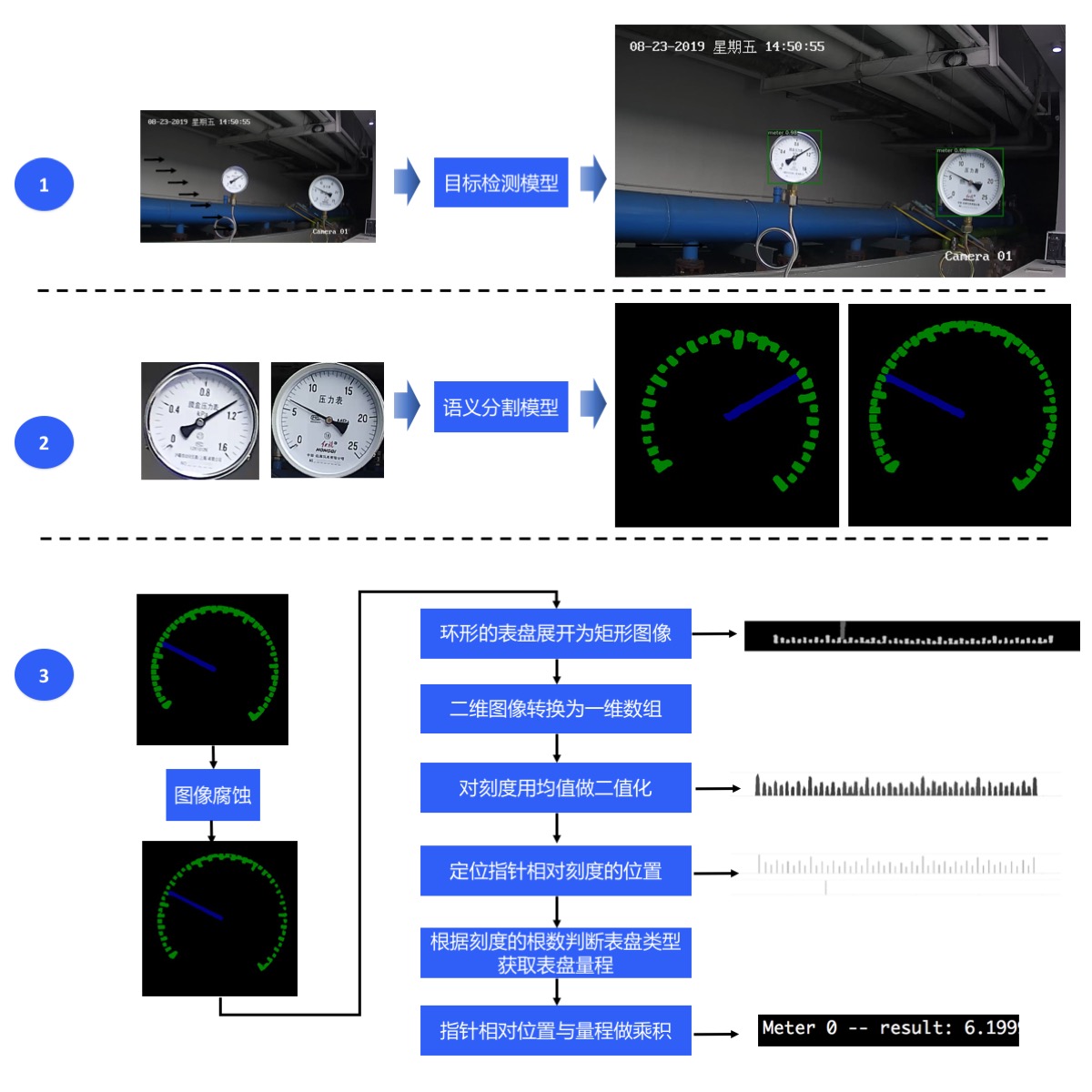
本案例开放了预先训练好的检测模型和语义分割模型,可以使用这些模型快速体验表计读数全流程,也可以直接将这些模型部署在服务器端或jetson嵌入式设备上进行推理预测。
| 表计检测模型 | 指针和刻度分割模型 |
| ------------------------------------------------------------ | ------------------------------------------------------------ |
|
[
meter_det_inference_model
](
https://bj.bcebos.com/paddlex/
meterreader/models/meter_det_inference_model.tar.gz
)
|
[
meter_seg_inference_model
](
https://bj.bcebos.com/paddlex/meter
reader/models/meter_seg_inference_model.tar.gz
)
|
|
[
meter_det_inference_model
](
https://bj.bcebos.com/paddlex/
examples/meter_reader/models/meter_det_inference_model.tar.gz
)
|
[
meter_seg_inference_model
](
https://bj.bcebos.com/paddlex/examples/meter_
reader/models/meter_seg_inference_model.tar.gz
)
|
## <h2 id="3">快速体验表盘读数</h2>
...
...
@@ -77,6 +77,7 @@ cd PaddleX/examples/meter_reader/
| seg_batch_size | 分割的批量大小,默认为2 |
| seg_thread_num | 分割预测的线程数,默认为cpu处理器个数 |
| use_camera | 是否使用摄像头采集图片,默认为False |
| camera_id | 摄像头设备ID,默认值为0 |
| use_erode | 是否使用图像腐蚀对分割预测图进行细分,默认为False |
| erode_kernel | 图像腐蚀操作时的卷积核大小,默认值为4 |
...
...
@@ -122,7 +123,7 @@ python3 reader_infer.py --detector_dir /path/to/det_inference_model --segmenter_
git clone https://github.com/PaddlePaddle/PaddleX
```
2.
将
`PaddleX\examples\meter_reader\deploy\cpp`
下的
`meter`
文件夹和
`CMakeList.txt`
拷贝至
`PaddleX\deploy\cpp`
目录下,拷贝之前可以将
`PaddleX\deploy\cpp`
下原本的
`CMakeList.txt`
做好备份。
2.
将
`PaddleX\examples\meter_reader\deploy\cpp`
下的
`meter
_reader
`
文件夹和
`CMakeList.txt`
拷贝至
`PaddleX\deploy\cpp`
目录下,拷贝之前可以将
`PaddleX\deploy\cpp`
下原本的
`CMakeList.txt`
做好备份。
3.
按照
[
Windows平台部署
](
https://github.com/PaddlePaddle/PaddleX/blob/develop/docs/tutorials/deploy/deploy_server/deploy_cpp/deploy_cpp_win_vs2019.md
)
中的Step2至Step4完成C++预测代码的编译。
...
...
@@ -132,7 +133,7 @@ git clone https://github.com/PaddlePaddle/PaddleX
cd PaddleX\deploy\cpp\out\build\x64-Release
```
预测程序为paddle_inference
\m
eter.exe,其主要命令参数说明如下:
预测程序为paddle_inference
\m
eter
_reader
.exe,其主要命令参数说明如下:
| 参数 | 说明 |
| ---- | ---- |
...
...
@@ -151,7 +152,7 @@ git clone https://github.com/PaddlePaddle/PaddleX
| camera_id | 摄像头设备ID,默认值为0 |
| use_erode | 是否使用图像腐蚀对分割预测图进行去噪,支持值为0或1(默认值为1) |
| erode_kernel | 图像腐蚀操作时的卷积核大小,默认值为4 |
| score_threshold | 检测模型输出结果中,预测得分低于该阈值的框将被滤除,默认值为0.5|
5.
推理预测:
...
...
@@ -160,19 +161,19 @@ git clone https://github.com/PaddlePaddle/PaddleX
*
使用未加密的模型对单张图片做预测
```
shell
.
\p
addlex_inference
\m
eter.exe
--det_model_dir
=
\p
ath
\t
o
\d
et_inference_model
--seg_model_dir
=
\p
ath
\t
o
\s
eg_inference_model
--image
=
\p
ath
\t
o
\m
eter_test
\2
0190822_168.jpg
--use_gpu
=
1
--use_erode
=
1
--save_dir
=
output
.
\p
addlex_inference
\m
eter
_reader
.exe
--det_model_dir
=
\p
ath
\t
o
\d
et_inference_model
--seg_model_dir
=
\p
ath
\t
o
\s
eg_inference_model
--image
=
\p
ath
\t
o
\m
eter_test
\2
0190822_168.jpg
--use_gpu
=
1
--use_erode
=
1
--save_dir
=
output
```
*
使用未加密的模型对图像列表做预测
```
shell
.
\p
addlex_inference
\m
eter.exe
--det_model_dir
=
\p
ath
\t
o
\d
et_inference_model
--seg_model_dir
=
\p
ath
\t
o
\s
eg_inference_model
--image_list
=
\p
ath
\t
o
\m
eter_test
\i
mage_list.txt
--use_gpu
=
1
--use_erode
=
1
--save_dir
=
output
.
\p
addlex_inference
\m
eter
_reader
.exe
--det_model_dir
=
\p
ath
\t
o
\d
et_inference_model
--seg_model_dir
=
\p
ath
\t
o
\s
eg_inference_model
--image_list
=
\p
ath
\t
o
\m
eter_test
\i
mage_list.txt
--use_gpu
=
1
--use_erode
=
1
--save_dir
=
output
```
*
使用未加密的模型开启摄像头做预测
```
shell
.
\p
addlex_inference
\m
eter.exe
--det_model_dir
=
\p
ath
\t
o
\d
et_inference_model
--seg_model_dir
=
\p
ath
\t
o
\s
eg_inference_model
--use_camera
=
1
--use_gpu
=
1
--use_erode
=
1
--save_dir
=
output
.
\p
addlex_inference
\m
eter
_reader
.exe
--det_model_dir
=
\p
ath
\t
o
\d
et_inference_model
--seg_model_dir
=
\p
ath
\t
o
\s
eg_inference_model
--use_camera
=
1
--use_gpu
=
1
--use_erode
=
1
--save_dir
=
output
```
*
使用加密后的模型对单张图片做预测
...
...
@@ -180,7 +181,7 @@ git clone https://github.com/PaddlePaddle/PaddleX
如果未对模型进行加密,请参考
[
加密PaddleX模型
](
https://github.com/PaddlePaddle/PaddleX/blob/develop/docs/tutorials/deploy/deploy_server/encryption.html#paddlex
)
对模型进行加密。例如加密后的检测模型所在目录为
`\path\to\encrypted_det_inference_model`
,密钥为
`yEBLDiBOdlj+5EsNNrABhfDuQGkdcreYcHcncqwdbx0=`
;加密后的分割模型所在目录为
`\path\to\encrypted_seg_inference_model`
,密钥为
`DbVS64I9pFRo5XmQ8MNV2kSGsfEr4FKA6OH9OUhRrsY=`
```
shell
.
\p
addlex_inference
\m
eter.exe
--det_model_dir
=
\p
ath
\t
o
\e
ncrypted_det_inference_model
--seg_model_dir
=
\p
ath
\t
o
\e
ncrypted_seg_inference_model
--image
=
\p
ath
\t
o
\t
est.jpg
--use_gpu
=
1
--use_erode
=
1
--save_dir
=
output
--det_key
yEBLDiBOdlj+5EsNNrABhfDuQGkdcreYcHcncqwdbx0
=
--seg_key
DbVS64I9pFRo5XmQ8MNV2kSGsfEr4FKA6OH9OUhRrsY
=
.
\p
addlex_inference
\m
eter
_reader
.exe
--det_model_dir
=
\p
ath
\t
o
\e
ncrypted_det_inference_model
--seg_model_dir
=
\p
ath
\t
o
\e
ncrypted_seg_inference_model
--image
=
\p
ath
\t
o
\t
est.jpg
--use_gpu
=
1
--use_erode
=
1
--save_dir
=
output
--det_key
yEBLDiBOdlj+5EsNNrABhfDuQGkdcreYcHcncqwdbx0
=
--seg_key
DbVS64I9pFRo5XmQ8MNV2kSGsfEr4FKA6OH9OUhRrsY
=
```
### Linux系统的jeton嵌入式设备安全部署
...
...
@@ -193,12 +194,12 @@ git clone https://github.com/PaddlePaddle/PaddleX
git clone https://github.com/PaddlePaddle/PaddleX
```
2.
将
`PaddleX/examples/meter_reader
deploy/cpp`
下的
`met
er`
文件夹和
`CMakeList.txt`
拷贝至
`PaddleX/deploy/cpp`
目录下,拷贝之前可以将
`PaddleX/deploy/cpp`
下原本的
`CMakeList.txt`
做好备份。
2.
将
`PaddleX/examples/meter_reader
/deploy/cpp`
下的
`meter_read
er`
文件夹和
`CMakeList.txt`
拷贝至
`PaddleX/deploy/cpp`
目录下,拷贝之前可以将
`PaddleX/deploy/cpp`
下原本的
`CMakeList.txt`
做好备份。
3.
按照
[
Nvidia-Jetson开发板部署
](
)中的Step2至Step3完成C++预测代码的编译。
4.
编译成功后,可执行程为
`build/meter
/detecto
r`
,其主要命令参数说明如下:
4.
编译成功后,可执行程为
`build/meter
_reader/meter_reade
r`
,其主要命令参数说明如下:
| 参数 | 说明 |
| ---- | ---- |
| det_model_dir | 表计检测模型路径 |
...
...
@@ -216,6 +217,7 @@ git clone https://github.com/PaddlePaddle/PaddleX
| camera_id | 摄像头设备ID,默认值为0 |
| use_erode | 是否使用图像腐蚀对分割预测图进行细分,支持值为0或1(默认值为1) |
| erode_kernel | 图像腐蚀操作时的卷积核大小,默认值为4 |
| score_threshold | 检测模型输出结果中,预测得分低于该阈值的框将被滤除,默认值为0.5|
5.
推理预测:
...
...
@@ -224,19 +226,19 @@ git clone https://github.com/PaddlePaddle/PaddleX
*
使用未加密的模型对单张图片做预测
```
shell
./build/meter
/met
er
--det_model_dir
=
/path/to/det_inference_model
--seg_model_dir
=
/path/to/seg_inference_model
--image
=
/path/to/meter_test/20190822_168.jpg
--use_gpu
=
1
--use_erode
=
1
--save_dir
=
output
./build/meter
_reader/meter_read
er
--det_model_dir
=
/path/to/det_inference_model
--seg_model_dir
=
/path/to/seg_inference_model
--image
=
/path/to/meter_test/20190822_168.jpg
--use_gpu
=
1
--use_erode
=
1
--save_dir
=
output
```
*
使用未加密的模型对图像列表做预测
```
shell
./build/meter
/met
er
--det_model_dir
=
/path/to/det_inference_model
--seg_model_dir
=
/path/to/seg_inference_model
--image_list
=
/path/to/image_list.txt
--use_gpu
=
1
--use_erode
=
1
--save_dir
=
output
./build/meter
_reader/meter_read
er
--det_model_dir
=
/path/to/det_inference_model
--seg_model_dir
=
/path/to/seg_inference_model
--image_list
=
/path/to/image_list.txt
--use_gpu
=
1
--use_erode
=
1
--save_dir
=
output
```
*
使用未加密的模型开启摄像头做预测
```
shell
./build/meter
/met
er
--det_model_dir
=
/path/to/det_inference_model
--seg_model_dir
=
/path/to/seg_inference_model
--use_camera
=
1
--use_gpu
=
1
--use_erode
=
1
--save_dir
=
output
./build/meter
_reader/meter_read
er
--det_model_dir
=
/path/to/det_inference_model
--seg_model_dir
=
/path/to/seg_inference_model
--use_camera
=
1
--use_gpu
=
1
--use_erode
=
1
--save_dir
=
output
```
*
使用加密后的模型对单张图片做预测
...
...
@@ -244,7 +246,7 @@ git clone https://github.com/PaddlePaddle/PaddleX
如果未对模型进行加密,请参考
[
加密PaddleX模型
](
https://github.com/PaddlePaddle/PaddleX/blob/develop/docs/tutorials/deploy/deploy_server/encryption.html#paddlex
)
对模型进行加密。例如加密后的检测模型所在目录为
`/path/to/encrypted_det_inference_model`
,密钥为
`yEBLDiBOdlj+5EsNNrABhfDuQGkdcreYcHcncqwdbx0=`
;加密后的分割模型所在目录为
`/path/to/encrypted_seg_inference_model`
,密钥为
`DbVS64I9pFRo5XmQ8MNV2kSGsfEr4FKA6OH9OUhRrsY=`
```
shell
./build/meter
/met
er
--det_model_dir
=
/path/to/encrypted_det_inference_model
--seg_model_dir
=
/path/to/encrypted_seg_inference_model
--image
=
/path/to/test.jpg
--use_gpu
=
1
--use_erode
=
1
--save_dir
=
output
--det_key
yEBLDiBOdlj+5EsNNrABhfDuQGkdcreYcHcncqwdbx0
=
--seg_key
DbVS64I9pFRo5XmQ8MNV2kSGsfEr4FKA6OH9OUhRrsY
=
./build/meter
_reader/meter_read
er
--det_model_dir
=
/path/to/encrypted_det_inference_model
--seg_model_dir
=
/path/to/encrypted_seg_inference_model
--image
=
/path/to/test.jpg
--use_gpu
=
1
--use_erode
=
1
--save_dir
=
output
--det_key
yEBLDiBOdlj+5EsNNrABhfDuQGkdcreYcHcncqwdbx0
=
--seg_key
DbVS64I9pFRo5XmQ8MNV2kSGsfEr4FKA6OH9OUhRrsY
=
```
...
...
examples/meter_reader/deploy/cpp/CMakeLists.txt
浏览文件 @
39347594
cmake_minimum_required
(
VERSION 3.0
)
project
(
PaddleX CXX C
)
option
(
WITH_MKL
"Compile meter with MKL/OpenBlas support,defaultuseMKL."
ON
)
option
(
WITH_GPU
"Compile meter with GPU/CPU, default use CPU."
ON
)
option
(
WITH_STATIC_LIB
"Compile meter with static/shared library, default use static."
OFF
)
option
(
WITH_TENSORRT
"Compile meter with TensorRT."
OFF
)
option
(
WITH_ENCRYPTION
"Compile meter with encryption tool."
OFF
)
option
(
WITH_MKL
"Compile meter
_reader
with MKL/OpenBlas support,defaultuseMKL."
ON
)
option
(
WITH_GPU
"Compile meter
_reader
with GPU/CPU, default use CPU."
ON
)
option
(
WITH_STATIC_LIB
"Compile meter
_reader
with static/shared library, default use static."
OFF
)
option
(
WITH_TENSORRT
"Compile meter
_reader
with TensorRT."
OFF
)
option
(
WITH_ENCRYPTION
"Compile meter
_reader
with encryption tool."
OFF
)
SET
(
TENSORRT_DIR
""
CACHE PATH
"Location of libraries"
)
SET
(
PADDLE_DIR
""
CACHE PATH
"Location of libraries"
)
...
...
@@ -16,7 +16,7 @@ SET(CUDA_LIB "" CACHE PATH "Location of libraries")
if
(
NOT WIN32
)
set
(
CMAKE_ARCHIVE_OUTPUT_DIRECTORY
${
CMAKE_BINARY_DIR
}
/lib
)
set
(
CMAKE_LIBRARY_OUTPUT_DIRECTORY
${
CMAKE_BINARY_DIR
}
/lib
)
set
(
CMAKE_RUNTIME_OUTPUT_DIRECTORY
${
CMAKE_BINARY_DIR
}
/meter
)
set
(
CMAKE_RUNTIME_OUTPUT_DIRECTORY
${
CMAKE_BINARY_DIR
}
/meter
_reader
)
else
()
set
(
CMAKE_ARCHIVE_OUTPUT_DIRECTORY
${
CMAKE_BINARY_DIR
}
/paddlex_inference
)
set
(
CMAKE_LIBRARY_OUTPUT_DIRECTORY
${
CMAKE_BINARY_DIR
}
/paddlex_inference
)
...
...
@@ -275,12 +275,12 @@ add_library(paddlex_inference SHARED src/visualize src/transforms.cpp src/paddle
ADD_DEPENDENCIES
(
paddlex_inference ext-yaml-cpp
)
target_link_libraries
(
paddlex_inference
${
DEPS
}
)
add_executable
(
meter
meter/meter.cpp meter/global.cpp meter/readvalue
.cpp src/transforms.cpp src/paddlex.cpp src/visualize.cpp
)
ADD_DEPENDENCIES
(
meter ext-yaml-cpp
)
target_link_libraries
(
meter
${
DEPS
}
)
add_executable
(
meter
_reader meter_reader/meter_reader.cpp meter_reader/global.cpp meter_reader/postprocess
.cpp src/transforms.cpp src/paddlex.cpp src/visualize.cpp
)
ADD_DEPENDENCIES
(
meter
_reader
ext-yaml-cpp
)
target_link_libraries
(
meter
_reader
${
DEPS
}
)
if
(
WIN32 AND WITH_MKL
)
add_custom_command
(
TARGET meter POST_BUILD
add_custom_command
(
TARGET meter
_reader
POST_BUILD
COMMAND
${
CMAKE_COMMAND
}
-E copy_if_different
${
PADDLE_DIR
}
/third_party/install/mklml/lib/mklml.dll ./mklml.dll
COMMAND
${
CMAKE_COMMAND
}
-E copy_if_different
${
PADDLE_DIR
}
/third_party/install/mklml/lib/libiomp5md.dll ./libiomp5md.dll
COMMAND
${
CMAKE_COMMAND
}
-E copy_if_different
${
PADDLE_DIR
}
/third_party/install/mkldnn/lib/mkldnn.dll ./mkldnn.dll
...
...
@@ -290,7 +290,7 @@ if (WIN32 AND WITH_MKL)
)
# for encryption
if
(
EXISTS
"
${
ENCRYPTION_DIR
}
/lib/pmodel-decrypt.dll"
)
add_custom_command
(
TARGET meter POST_BUILD
add_custom_command
(
TARGET meter
_reader
POST_BUILD
COMMAND
${
CMAKE_COMMAND
}
-E copy_if_different
${
ENCRYPTION_DIR
}
/lib/pmodel-decrypt.dll ./pmodel-decrypt.dll
COMMAND
${
CMAKE_COMMAND
}
-E copy_if_different
${
ENCRYPTION_DIR
}
/lib/pmodel-decrypt.dll ./release/pmodel-decrypt.dll
)
...
...
examples/meter_reader/deploy/cpp/meter/global.cpp
→
examples/meter_reader/deploy/cpp/meter
_reader
/global.cpp
浏览文件 @
39347594
...
...
@@ -21,7 +21,7 @@
#include <opencv2/highgui.hpp>
#include <opencv2/core/core.hpp>
#include "meter/global.h"
#include "meter
_reader
/global.h"
std
::
vector
<
int
>
IMAGE_SHAPE
=
{
1920
,
1080
};
std
::
vector
<
int
>
RESULT_SHAPE
=
{
1280
,
720
};
...
...
examples/meter_reader/deploy/cpp/meter/global.h
→
examples/meter_reader/deploy/cpp/meter
_reader
/global.h
浏览文件 @
39347594
文件已移动
examples/meter_reader/deploy/cpp/meter
/met
er.cpp
→
examples/meter_reader/deploy/cpp/meter
_reader/meter_read
er.cpp
浏览文件 @
39347594
...
...
@@ -26,8 +26,8 @@
#include <opencv2/highgui.hpp>
#include <opencv2/core/core.hpp>
#include "meter/global.h"
#include "meter
/readvalue
.h"
#include "meter
_reader
/global.h"
#include "meter
_reader/postprocess
.h"
#include "include/paddlex/paddlex.h"
#include "include/paddlex/visualize.h"
...
...
@@ -51,16 +51,31 @@ DEFINE_string(seg_key, "", "Segmenter model key of encryption");
DEFINE_string
(
image
,
""
,
"Path of test image file"
);
DEFINE_string
(
image_list
,
""
,
"Path of test image list file"
);
DEFINE_string
(
save_dir
,
"output"
,
"Path to save visualized image"
);
DEFINE_double
(
score_threshold
,
0.5
,
"Detected bbox whose score is lower than this threshlod is filtered"
);
void
predict
(
const
cv
::
Mat
&
input_image
,
PaddleX
::
Model
*
det_model
,
PaddleX
::
Model
*
seg_model
,
const
std
::
string
save_dir
,
const
std
::
string
image_path
,
const
bool
use_erode
,
const
int
erode_kernel
,
const
int
thread_num
,
const
int
seg_batch_size
)
{
const
int
seg_batch_size
,
const
double
threshold
)
{
PaddleX
::
DetResult
det_result
;
det_model
->
predict
(
input_image
,
&
det_result
);
int
meter_num
=
det_result
.
boxes
.
size
();
PaddleX
::
DetResult
filter_result
;
int
num_bboxes
=
det_result
.
boxes
.
size
();
for
(
int
i
=
0
;
i
<
num_bboxes
;
++
i
)
{
double
score
=
det_result
.
boxes
[
i
].
score
;
if
(
score
>
threshold
||
score
==
threshold
)
{
PaddleX
::
Box
box
;
box
.
category_id
=
det_result
.
boxes
[
i
].
category_id
;
box
.
category
=
det_result
.
boxes
[
i
].
category
;
box
.
score
=
det_result
.
boxes
[
i
].
score
;
box
.
coordinate
=
det_result
.
boxes
[
i
].
coordinate
;
filter_result
.
boxes
.
push_back
(
std
::
move
(
box
));
}
}
int
meter_num
=
filter_result
.
boxes
.
size
();
if
(
!
meter_num
)
{
std
::
cout
<<
"Don't find any meter."
<<
std
::
endl
;
return
;
...
...
@@ -74,10 +89,10 @@ void predict(const cv::Mat &input_image, PaddleX::Model *det_model,
int
batch_thread_num
=
std
::
min
(
thread_num
,
im_vec_size
-
i
);
#pragma omp parallel for num_threads(batch_thread_num)
for
(
int
j
=
i
;
j
<
im_vec_size
;
++
j
)
{
int
left
=
static_cast
<
int
>
(
det
_result
.
boxes
[
j
].
coordinate
[
0
]);
int
top
=
static_cast
<
int
>
(
det
_result
.
boxes
[
j
].
coordinate
[
1
]);
int
width
=
static_cast
<
int
>
(
det
_result
.
boxes
[
j
].
coordinate
[
2
]);
int
height
=
static_cast
<
int
>
(
det
_result
.
boxes
[
j
].
coordinate
[
3
]);
int
left
=
static_cast
<
int
>
(
filter
_result
.
boxes
[
j
].
coordinate
[
0
]);
int
top
=
static_cast
<
int
>
(
filter
_result
.
boxes
[
j
].
coordinate
[
1
]);
int
width
=
static_cast
<
int
>
(
filter
_result
.
boxes
[
j
].
coordinate
[
2
]);
int
height
=
static_cast
<
int
>
(
filter
_result
.
boxes
[
j
].
coordinate
[
3
]);
int
right
=
left
+
width
-
1
;
int
bottom
=
top
+
height
-
1
;
...
...
@@ -142,10 +157,10 @@ void predict(const cv::Mat &input_image, PaddleX::Model *det_model,
<<
" -- result: "
<<
result
<<
" --"
<<
std
::
endl
;
int
lx
=
static_cast
<
int
>
(
det
_result
.
boxes
[
i
].
coordinate
[
0
]);
int
ly
=
static_cast
<
int
>
(
det
_result
.
boxes
[
i
].
coordinate
[
1
]);
int
w
=
static_cast
<
int
>
(
det
_result
.
boxes
[
i
].
coordinate
[
2
]);
int
h
=
static_cast
<
int
>
(
det
_result
.
boxes
[
i
].
coordinate
[
3
]);
int
lx
=
static_cast
<
int
>
(
filter
_result
.
boxes
[
i
].
coordinate
[
0
]);
int
ly
=
static_cast
<
int
>
(
filter
_result
.
boxes
[
i
].
coordinate
[
1
]);
int
w
=
static_cast
<
int
>
(
filter
_result
.
boxes
[
i
].
coordinate
[
2
]);
int
h
=
static_cast
<
int
>
(
filter
_result
.
boxes
[
i
].
coordinate
[
3
]);
cv
::
Rect
bounding_box
=
cv
::
Rect
(
lx
,
ly
,
w
,
h
)
&
cv
::
Rect
(
0
,
0
,
output_image
.
cols
,
output_image
.
rows
);
...
...
@@ -223,7 +238,8 @@ int main(int argc, char **argv) {
std
::
string
ext_name
=
".jpg"
;
predict
(
im
,
&
det_model
,
&
seg_model
,
FLAGS_save_dir
,
std
::
to_string
(
imgs
)
+
ext_name
,
FLAGS_use_erode
,
FLAGS_erode_kernel
,
FLAGS_thread_num
,
FLAGS_seg_batch_size
);
FLAGS_erode_kernel
,
FLAGS_thread_num
,
FLAGS_seg_batch_size
,
FLAGS_score_threshold
);
imgs
++
;
auto
imread_duration
=
duration_cast
<
microseconds
>
(
imread_end
-
start
);
total_imread_time_s
+=
static_cast
<
double
>
(
imread_duration
.
count
())
*
...
...
@@ -254,7 +270,8 @@ int main(int argc, char **argv) {
predict
(
im
,
&
det_model
,
&
seg_model
,
FLAGS_save_dir
,
image_path
,
FLAGS_use_erode
,
FLAGS_erode_kernel
,
FLAGS_thread_num
,
FLAGS_seg_batch_size
);
FLAGS_thread_num
,
FLAGS_seg_batch_size
,
FLAGS_score_threshold
);
auto
imread_duration
=
duration_cast
<
microseconds
>
(
imread_end
-
start
);
total_imread_time_s
+=
static_cast
<
double
>
(
imread_duration
.
count
())
*
...
...
@@ -274,7 +291,8 @@ int main(int argc, char **argv) {
predict
(
im
,
&
det_model
,
&
seg_model
,
FLAGS_save_dir
,
FLAGS_image
,
FLAGS_use_erode
,
FLAGS_erode_kernel
,
FLAGS_thread_num
,
FLAGS_seg_batch_size
);
FLAGS_thread_num
,
FLAGS_seg_batch_size
,
FLAGS_score_threshold
);
auto
imread_duration
=
duration_cast
<
microseconds
>
(
imread_end
-
start
);
total_imread_time_s
+=
static_cast
<
double
>
(
imread_duration
.
count
())
*
...
...
examples/meter_reader/deploy/cpp/meter
/readvalue
.cpp
→
examples/meter_reader/deploy/cpp/meter
_reader/postprocess
.cpp
浏览文件 @
39347594
...
...
@@ -24,8 +24,8 @@
#include <opencv2/highgui.hpp>
#include <opencv2/core/core.hpp>
#include "meter/global.h"
#include "meter
/readvalue
.h"
#include "meter
_reader
/global.h"
#include "meter
_reader/postprocess
.h"
using
namespace
std
::
chrono
;
// NOLINT
...
...
examples/meter_reader/deploy/cpp/meter
/readvalue
.h
→
examples/meter_reader/deploy/cpp/meter
_reader/postprocess
.h
浏览文件 @
39347594
文件已移动
examples/meter_reader/deploy/python/reader_deploy.py
浏览文件 @
39347594
...
...
@@ -70,6 +70,12 @@ def parse_args():
dest
=
'use_camera'
,
help
=
'Whether use camera or not'
,
action
=
'store_true'
)
parser
.
add_argument
(
'--camera_id'
,
dest
=
'camera_id'
,
type
=
int
,
help
=
'The camera id'
,
default
=
0
)
parser
.
add_argument
(
'--use_erode'
,
dest
=
'use_erode'
,
...
...
@@ -188,9 +194,9 @@ class MeterReader:
thread_num
=
seg_thread_num
)
if
use_erode
:
kernel
=
np
.
ones
((
erode_kernel
,
erode_kernel
),
np
.
uint8
)
for
i
in
range
(
len
(
seg_results
)):
result
[
i
][
'label_map'
]
=
cv2
.
erode
(
result
[
i
][
'label_map'
],
kernel
)
for
i
in
range
(
len
(
result
)):
result
[
i
][
'label_map'
]
=
cv2
.
erode
(
result
[
i
][
'label_map'
],
kernel
)
seg_results
.
extend
(
result
)
results
=
list
()
...
...
@@ -330,7 +336,7 @@ def infer(args):
args
.
erode_kernel
,
args
.
score_threshold
,
args
.
seg_batch_size
,
args
.
seg_thread_num
)
elif
args
.
with_camera
:
cap_video
=
cv2
.
VideoCapture
(
0
)
cap_video
=
cv2
.
VideoCapture
(
args
.
camera_id
)
if
not
cap_video
.
isOpened
():
raise
Exception
(
"Error opening video stream, please make sure the camera is working"
...
...
examples/meter_reader/image/MeterReader_Architecture.jpg
查看替换文件 @
c8d7de2a
浏览文件 @
39347594
205.5 KB
|
W:
|
H:
206.2 KB
|
W:
|
H:
2-up
Swipe
Onion skin
examples/meter_reader/reader_infer.py
浏览文件 @
39347594
...
...
@@ -70,6 +70,12 @@ def parse_args():
dest
=
'use_camera'
,
help
=
'Whether use camera or not'
,
action
=
'store_true'
)
parser
.
add_argument
(
'--camera_id'
,
dest
=
'camera_id'
,
type
=
int
,
help
=
'The camera id'
,
default
=
0
)
parser
.
add_argument
(
'--use_erode'
,
dest
=
'use_erode'
,
...
...
@@ -189,8 +195,8 @@ class MeterReader:
if
use_erode
:
kernel
=
np
.
ones
((
erode_kernel
,
erode_kernel
),
np
.
uint8
)
for
i
in
range
(
len
(
result
)):
result
[
i
][
'label_map'
]
=
cv2
.
erode
(
result
[
i
][
'label_map'
],
kernel
)
result
[
i
][
'label_map'
]
=
cv2
.
erode
(
result
[
i
][
'label_map'
],
kernel
)
seg_results
.
extend
(
result
)
results
=
list
()
...
...
@@ -322,7 +328,7 @@ def infer(args):
continue
im_file
=
osp
.
join
(
args
.
image_dir
,
im_file
)
image_lists
.
append
(
im_file
)
meter_reader
=
MeterReader
(
args
.
detector_dir
,
args
.
segmenter_dir
)
if
len
(
image_lists
)
>
0
:
for
im_file
in
image_lists
:
...
...
@@ -330,7 +336,7 @@ def infer(args):
args
.
erode_kernel
,
args
.
score_threshold
,
args
.
seg_batch_size
,
args
.
seg_thread_num
)
elif
args
.
with_camera
:
cap_video
=
cv2
.
VideoCapture
(
0
)
cap_video
=
cv2
.
VideoCapture
(
args
.
camera_id
)
if
not
cap_video
.
isOpened
():
raise
Exception
(
"Error opening video stream, please make sure the camera is working"
...
...
examples/meter_reader/train_detection.py
浏览文件 @
39347594
...
...
@@ -10,14 +10,24 @@ meter_det_dataset = 'https://bj.bcebos.com/paddlex/meterreader/datasets/meter_de
pdx
.
utils
.
download_and_decompress
(
meter_det_dataset
,
path
=
'./'
)
# 定义训练和验证时的transforms
# API说明: https://paddlex.readthedocs.io/zh_CN/latest/apis/transforms/det_transforms.html#composedyolotransforms
train_transforms
=
transforms
.
ComposedYOLOv3Transforms
(
mode
=
'train'
,
shape
=
[
608
,
608
])
eval_transforms
=
transforms
.
ComposedYOLOv3Transforms
(
mode
=
'eval'
,
shape
=
[
608
,
608
])
train_transforms
=
transforms
.
Compose
([
transforms
.
MixupImage
(
mixup_epoch
=
250
),
transforms
.
RandomDistort
(),
transforms
.
RandomExpand
(),
transforms
.
RandomCrop
(),
transforms
.
Resize
(
target_size
=
608
,
interp
=
'RANDOM'
),
transforms
.
RandomHorizontalFlip
(),
transforms
.
Normalize
(),
])
eval_transforms
=
transforms
.
Compose
([
transforms
.
Resize
(
target_size
=
608
,
interp
=
'CUBIC'
),
transforms
.
Normalize
(),
])
# 定义训练和验证所用的数据集
# API说明: https://paddlex.readthedocs.io/zh_CN/latest/apis/datasets/detection.html#vocdetection
train_dataset
=
pdx
.
datasets
.
CocoDetection
(
data_dir
=
'meter_det/train/'
,
ann_file
=
'meter_det/annotations/instance_train.json'
,
...
...
paddlex/cv/datasets/__init__.py
浏览文件 @
39347594
...
...
@@ -19,4 +19,4 @@ from .seg_dataset import SegDataset
from
.easydata_cls
import
EasyDataCls
from
.easydata_det
import
EasyDataDet
from
.easydata_seg
import
EasyDataSeg
from
.dataset
import
GenerateMiniB
atch
from
.dataset
import
generate_minib
atch
paddlex/cv/datasets/dataset.py
浏览文件 @
39347594
...
...
@@ -114,7 +114,7 @@ def multithread_reader(mapper,
while
not
isinstance
(
sample
,
EndSignal
):
batch_data
.
append
(
sample
)
if
len
(
batch_data
)
==
batch_size
:
batch_data
=
GenerateMiniB
atch
(
batch_data
)
batch_data
=
generate_minib
atch
(
batch_data
)
yield
batch_data
batch_data
=
[]
sample
=
out_queue
.
get
()
...
...
@@ -126,11 +126,11 @@ def multithread_reader(mapper,
else
:
batch_data
.
append
(
sample
)
if
len
(
batch_data
)
==
batch_size
:
batch_data
=
GenerateMiniB
atch
(
batch_data
)
batch_data
=
generate_minib
atch
(
batch_data
)
yield
batch_data
batch_data
=
[]
if
not
drop_last
and
len
(
batch_data
)
!=
0
:
batch_data
=
GenerateMiniB
atch
(
batch_data
)
batch_data
=
generate_minib
atch
(
batch_data
)
yield
batch_data
batch_data
=
[]
...
...
@@ -187,49 +187,62 @@ def multiprocess_reader(mapper,
else
:
batch_data
.
append
(
sample
)
if
len
(
batch_data
)
==
batch_size
:
batch_data
=
GenerateMiniB
atch
(
batch_data
)
batch_data
=
generate_minib
atch
(
batch_data
)
yield
batch_data
batch_data
=
[]
if
len
(
batch_data
)
!=
0
and
not
drop_last
:
batch_data
=
GenerateMiniB
atch
(
batch_data
)
batch_data
=
generate_minib
atch
(
batch_data
)
yield
batch_data
batch_data
=
[]
return
queue_reader
def
GenerateMiniBatch
(
batch_data
):
def
generate_minibatch
(
batch_data
,
label_padding_value
=
255
):
# if batch_size is 1, do not pad the image
if
len
(
batch_data
)
==
1
:
return
batch_data
width
=
[
data
[
0
].
shape
[
2
]
for
data
in
batch_data
]
height
=
[
data
[
0
].
shape
[
1
]
for
data
in
batch_data
]
# if the sizes of images in a mini-batch are equal,
# do not pad the image
if
len
(
set
(
width
))
==
1
and
len
(
set
(
height
))
==
1
:
return
batch_data
max_shape
=
np
.
array
([
data
[
0
].
shape
for
data
in
batch_data
]).
max
(
axis
=
0
)
padding_batch
=
[]
for
data
in
batch_data
:
# pad the image to a same size
im_c
,
im_h
,
im_w
=
data
[
0
].
shape
[:]
padding_im
=
np
.
zeros
(
(
im_c
,
max_shape
[
1
],
max_shape
[
2
]),
dtype
=
np
.
float32
)
padding_im
[:,
:
im_h
,
:
im_w
]
=
data
[
0
]
if
len
(
data
)
>
1
:
if
isinstance
(
data
[
1
],
np
.
ndarray
):
# padding the image and label of segmentation
# during the training and evaluating phase
padding_label
=
np
.
zeros
(
(
1
,
max_shape
[
1
],
max_shape
[
2
])).
astype
(
'int64'
)
(
1
,
max_shape
[
1
],
max_shape
[
2
]
)).
astype
(
'int64'
)
+
label_padding_value
_
,
label_h
,
label_w
=
data
[
1
].
shape
padding_label
[:,
:
label_h
,
:
label_w
]
=
data
[
1
]
padding_batch
.
append
((
padding_im
,
padding_label
))
elif
len
(
data
[
1
])
==
0
or
isinstance
(
data
[
1
][
0
],
tuple
)
and
data
[
1
][
0
][
0
]
in
[
'resize'
,
'padding'
]:
# padding the image and insert 'padding' into `im_info`
# of segmentation during the infering phase
if
len
(
data
[
1
])
==
0
or
'padding'
not
in
[
data
[
1
][
i
][
0
]
for
i
in
range
(
len
(
data
[
1
]))
]:
data
[
1
].
append
((
'padding'
,
[
im_h
,
im_w
]))
padding_batch
.
append
((
padding_im
,
)
+
tuple
(
data
[
1
:]))
else
:
# padding the image of detection, or
# padding the image of classification during the trainging
# and evaluating phase
padding_batch
.
append
((
padding_im
,
)
+
tuple
(
data
[
1
:]))
else
:
# padding the image of classification during the infering phase
padding_batch
.
append
((
padding_im
))
return
padding_batch
...
...
paddlex/cv/models/classifier.py
浏览文件 @
39347594
...
...
@@ -23,7 +23,7 @@ import paddlex.utils.logging as logging
from
paddlex.utils
import
seconds_to_hms
import
paddlex
from
paddlex.cv.transforms
import
arrange_transforms
from
paddlex.cv.datasets
import
GenerateMiniB
atch
from
paddlex.cv.datasets
import
generate_minib
atch
from
collections
import
OrderedDict
from
.base
import
BaseAPI
...
...
@@ -289,7 +289,7 @@ class BaseClassifier(BaseAPI):
batch_data
=
pool
.
map
(
transforms
,
images
)
pool
.
close
()
pool
.
join
()
padding_batch
=
GenerateMiniB
atch
(
batch_data
)
padding_batch
=
generate_minib
atch
(
batch_data
)
im
=
np
.
array
([
data
[
0
]
for
data
in
padding_batch
])
return
im
...
...
paddlex/cv/models/deeplabv3p.py
浏览文件 @
39347594
...
...
@@ -23,7 +23,7 @@ import paddle.fluid as fluid
import
paddlex.utils.logging
as
logging
import
paddlex
from
paddlex.cv.transforms
import
arrange_transforms
from
paddlex.cv.datasets
import
GenerateMiniB
atch
from
paddlex.cv.datasets
import
generate_minib
atch
from
collections
import
OrderedDict
from
.base
import
BaseAPI
from
.utils.seg_eval
import
ConfusionMatrix
...
...
@@ -340,16 +340,7 @@ class DeepLabv3p(BaseAPI):
for
step
,
data
in
tqdm
.
tqdm
(
enumerate
(
data_generator
()),
total
=
total_steps
):
images
=
np
.
array
([
d
[
0
]
for
d
in
data
])
_
,
_
,
im_h
,
im_w
=
images
.
shape
labels
=
list
()
for
d
in
data
:
padding_label
=
np
.
zeros
(
(
1
,
im_h
,
im_w
)).
astype
(
'int64'
)
+
self
.
ignore_index
_
,
label_h
,
label_w
=
d
[
1
].
shape
padding_label
[:,
:
label_h
,
:
label_w
]
=
d
[
1
]
labels
.
append
(
padding_label
)
labels
=
np
.
array
(
labels
)
labels
=
np
.
array
([
d
[
1
]
for
d
in
data
])
num_samples
=
images
.
shape
[
0
]
if
num_samples
<
batch_size
:
...
...
@@ -398,7 +389,7 @@ class DeepLabv3p(BaseAPI):
batch_data
=
pool
.
map
(
transforms
,
images
)
pool
.
close
()
pool
.
join
()
padding_batch
=
GenerateMiniB
atch
(
batch_data
)
padding_batch
=
generate_minib
atch
(
batch_data
)
im
=
np
.
array
(
[
data
[
0
]
for
data
in
padding_batch
],
dtype
=
padding_batch
[
0
][
0
].
dtype
)
...
...
paddlex/cv/models/faster_rcnn.py
浏览文件 @
39347594
...
...
@@ -23,7 +23,7 @@ import paddlex
import
os.path
as
osp
import
copy
from
paddlex.cv.transforms
import
arrange_transforms
from
paddlex.cv.datasets
import
GenerateMiniB
atch
from
paddlex.cv.datasets
import
generate_minib
atch
from
.base
import
BaseAPI
from
collections
import
OrderedDict
from
.utils.detection_eval
import
eval_results
,
bbox2out
...
...
@@ -109,24 +109,6 @@ class FasterRCNN(BaseAPI):
freeze_at
=
2
)
return
backbone
def
_generate_mini_batch
(
self
,
batch_data
):
if
len
(
batch_data
)
==
1
:
return
batch_data
width
=
[
data
[
0
].
shape
[
2
]
for
data
in
batch_data
]
height
=
[
data
[
0
].
shape
[
1
]
for
data
in
batch_data
]
if
len
(
set
(
width
))
==
1
and
len
(
set
(
height
))
==
1
:
return
batch_data
max_shape
=
np
.
array
([
data
[
0
].
shape
for
data
in
batch_data
]).
max
(
axis
=
0
)
padding_batch
=
[]
for
data
in
batch_data
:
im_c
,
im_h
,
im_w
=
data
[
0
].
shape
[:]
padding_im
=
np
.
zeros
(
(
im_c
,
max_shape
[
1
],
max_shape
[
2
]),
dtype
=
np
.
float32
)
padding_im
[:,
:
im_h
,
:
im_w
]
=
data
[
0
]
padding_batch
.
append
((
padding_im
,
)
+
data
[
1
:])
return
padding_batch
def
build_net
(
self
,
mode
=
'train'
):
train_pre_nms_top_n
=
2000
if
self
.
with_fpn
else
12000
test_pre_nms_top_n
=
1000
if
self
.
with_fpn
else
6000
...
...
@@ -404,7 +386,7 @@ class FasterRCNN(BaseAPI):
batch_data
=
pool
.
map
(
transforms
,
images
)
pool
.
close
()
pool
.
join
()
padding_batch
=
GenerateMiniB
atch
(
batch_data
)
padding_batch
=
generate_minib
atch
(
batch_data
)
im
=
np
.
array
([
data
[
0
]
for
data
in
padding_batch
])
im_resize_info
=
np
.
array
([
data
[
1
]
for
data
in
padding_batch
])
im_shape
=
np
.
array
([
data
[
2
]
for
data
in
padding_batch
])
...
...
@@ -461,10 +443,10 @@ class FasterRCNN(BaseAPI):
res
=
{
k
:
(
np
.
array
(
v
),
v
.
recursive_sequence_lengths
())
for
k
,
v
in
zip
(
list
(
test_outputs_keys
),
results
)
for
k
,
v
in
zip
(
list
(
self
.
test_outputs
.
keys
()),
result
)
}
res
[
'im_id'
]
=
(
np
.
array
(
[[
i
]
for
i
in
range
(
batch_size
)]).
astype
(
'int32'
),
[])
[[
i
]
for
i
in
range
(
len
(
images
)
)]).
astype
(
'int32'
),
[])
preds
=
FasterRCNN
.
_postprocess
(
res
,
len
(
images
),
self
.
num_classes
,
self
.
labels
)
...
...
@@ -510,10 +492,10 @@ class FasterRCNN(BaseAPI):
res
=
{
k
:
(
np
.
array
(
v
),
v
.
recursive_sequence_lengths
())
for
k
,
v
in
zip
(
list
(
test_outputs_keys
),
results
)
for
k
,
v
in
zip
(
list
(
self
.
test_outputs
.
keys
()),
result
)
}
res
[
'im_id'
]
=
(
np
.
array
(
[[
i
]
for
i
in
range
(
batch_size
)]).
astype
(
'int32'
),
[])
[[
i
]
for
i
in
range
(
len
(
img_file_list
)
)]).
astype
(
'int32'
),
[])
preds
=
FasterRCNN
.
_postprocess
(
res
,
len
(
img_file_list
),
self
.
num_classes
,
self
.
labels
)
...
...
paddlex/cv/models/mask_rcnn.py
浏览文件 @
39347594
...
...
@@ -22,6 +22,7 @@ import paddlex.utils.logging as logging
import
paddlex
import
copy
import
os.path
as
osp
from
paddlex.cv.transforms
import
arrange_transforms
from
collections
import
OrderedDict
from
.faster_rcnn
import
FasterRCNN
from
.utils.detection_eval
import
eval_results
,
bbox2out
,
mask2out
...
...
@@ -396,10 +397,10 @@ class MaskRCNN(FasterRCNN):
res
=
{
k
:
(
np
.
array
(
v
),
v
.
recursive_sequence_lengths
())
for
k
,
v
in
zip
(
list
(
test_outputs_keys
),
results
)
for
k
,
v
in
zip
(
list
s
(
self
.
test_outputs
.
keys
()),
result
)
}
res
[
'im_id'
]
=
(
np
.
array
(
[[
i
]
for
i
in
range
(
batch_size
)]).
astype
(
'int32'
),
[])
[[
i
]
for
i
in
range
(
len
(
images
)
)]).
astype
(
'int32'
),
[])
res
[
'im_shape'
]
=
(
np
.
array
(
im_shape
),
[])
preds
=
MaskRCNN
.
_postprocess
(
res
,
len
(
images
),
self
.
num_classes
,
...
...
@@ -446,12 +447,12 @@ class MaskRCNN(FasterRCNN):
res
=
{
k
:
(
np
.
array
(
v
),
v
.
recursive_sequence_lengths
())
for
k
,
v
in
zip
(
list
(
test_outputs_keys
),
results
)
for
k
,
v
in
zip
(
list
(
self
.
test_outputs
.
keys
()),
result
)
}
res
[
'im_id'
]
=
(
np
.
array
(
[[
i
]
for
i
in
range
(
batch_size
)]).
astype
(
'int32'
),
[])
[[
i
]
for
i
in
range
(
len
(
img_file_list
)
)]).
astype
(
'int32'
),
[])
res
[
'im_shape'
]
=
(
np
.
array
(
im_shape
),
[])
preds
=
MaskRCNN
.
_postprocess
(
res
,
len
(
im
ages
),
self
.
num_classes
,
len
(
im
g_file_list
),
self
.
num_classes
,
self
.
mask_head_resolution
,
self
.
labels
)
return
preds
paddlex/cv/models/yolo_v3.py
浏览文件 @
39347594
...
...
@@ -23,7 +23,7 @@ import paddlex.utils.logging as logging
import
paddlex
import
copy
from
paddlex.cv.transforms
import
arrange_transforms
from
paddlex.cv.datasets
import
GenerateMiniB
atch
from
paddlex.cv.datasets
import
generate_minib
atch
from
.base
import
BaseAPI
from
collections
import
OrderedDict
from
.utils.detection_eval
import
eval_results
,
bbox2out
...
...
@@ -364,7 +364,7 @@ class YOLOv3(BaseAPI):
batch_data
=
pool
.
map
(
transforms
,
images
)
pool
.
close
()
pool
.
join
()
padding_batch
=
GenerateMiniB
atch
(
batch_data
)
padding_batch
=
generate_minib
atch
(
batch_data
)
im
=
np
.
array
(
[
data
[
0
]
for
data
in
padding_batch
],
dtype
=
padding_batch
[
0
][
0
].
dtype
)
...
...
paddlex/cv/transforms/cls_transforms.py
浏览文件 @
39347594
...
...
@@ -68,13 +68,14 @@ class Compose(ClsTransform):
if
isinstance
(
im
,
np
.
ndarray
):
if
len
(
im
.
shape
)
!=
3
:
raise
Exception
(
"im should be 3-dimension, but now is {}-dimensions"
.
format
(
len
(
im
.
shape
)))
"im should be 3-dimension, but now is {}-dimensions"
.
format
(
len
(
im
.
shape
)))
else
:
try
:
im
=
cv2
.
imread
(
im
)
.
astype
(
'float32'
)
im
=
cv2
.
imread
(
im
)
except
:
raise
TypeError
(
'Can
\'
t read The image file {}!'
.
format
(
im
))
im
=
im
.
astype
(
'float32'
)
im
=
cv2
.
cvtColor
(
im
,
cv2
.
COLOR_BGR2RGB
)
for
op
in
self
.
transforms
:
if
isinstance
(
op
,
ClsTransform
):
...
...
@@ -139,8 +140,8 @@ class RandomCrop(ClsTransform):
tuple: 当label为空时,返回的tuple为(im, ),对应图像np.ndarray数据;
当label不为空时,返回的tuple为(im, label),分别对应图像np.ndarray数据、图像类别id。
"""
im
=
random_crop
(
im
,
self
.
crop_size
,
self
.
lower_scale
,
self
.
lower_ratio
,
self
.
upper_ratio
)
im
=
random_crop
(
im
,
self
.
crop_size
,
self
.
lower_scale
,
self
.
lower_ratio
,
self
.
upper_ratio
)
if
label
is
None
:
return
(
im
,
)
else
:
...
...
@@ -270,12 +271,14 @@ class ResizeByShort(ClsTransform):
im_short_size
=
min
(
im
.
shape
[
0
],
im
.
shape
[
1
])
im_long_size
=
max
(
im
.
shape
[
0
],
im
.
shape
[
1
])
scale
=
float
(
self
.
short_size
)
/
im_short_size
if
self
.
max_size
>
0
and
np
.
round
(
scale
*
im_long_size
)
>
self
.
max_size
:
if
self
.
max_size
>
0
and
np
.
round
(
scale
*
im_long_size
)
>
self
.
max_size
:
scale
=
float
(
self
.
max_size
)
/
float
(
im_long_size
)
resized_width
=
int
(
round
(
im
.
shape
[
1
]
*
scale
))
resized_height
=
int
(
round
(
im
.
shape
[
0
]
*
scale
))
im
=
cv2
.
resize
(
im
,
(
resized_width
,
resized_height
),
interpolation
=
cv2
.
INTER_LINEAR
)
im
,
(
resized_width
,
resized_height
),
interpolation
=
cv2
.
INTER_LINEAR
)
if
label
is
None
:
return
(
im
,
)
...
...
paddlex/cv/transforms/det_transforms.py
浏览文件 @
39347594
...
...
@@ -108,10 +108,11 @@ class Compose(DetTransform):
im
=
im_file
else
:
try
:
im
=
cv2
.
imread
(
im_file
)
.
astype
(
'float32'
)
im
=
cv2
.
imread
(
im_file
)
except
:
raise
TypeError
(
'Can
\'
t read The image file {}!'
.
format
(
im_file
))
im
=
im
.
astype
(
'float32'
)
im
=
cv2
.
cvtColor
(
im
,
cv2
.
COLOR_BGR2RGB
)
# make default im_info with [h, w, 1]
im_info
[
'im_resize_info'
]
=
np
.
array
(
...
...
paddlex/cv/transforms/seg_transforms.py
浏览文件 @
39347594
...
...
@@ -81,9 +81,10 @@ class Compose(SegTransform):
format
(
len
(
im
.
shape
)))
else
:
try
:
im
=
cv2
.
imread
(
im
)
.
astype
(
'float32'
)
im
=
cv2
.
imread
(
im
)
except
:
raise
ValueError
(
'Can
\'
t read The image file {}!'
.
format
(
im
))
im
=
im
.
astype
(
'float32'
)
if
self
.
to_rgb
:
im
=
cv2
.
cvtColor
(
im
,
cv2
.
COLOR_BGR2RGB
)
if
label
is
not
None
:
...
...
@@ -399,7 +400,8 @@ class ResizeByShort(SegTransform):
im_short_size
=
min
(
im
.
shape
[
0
],
im
.
shape
[
1
])
im_long_size
=
max
(
im
.
shape
[
0
],
im
.
shape
[
1
])
scale
=
float
(
self
.
short_size
)
/
im_short_size
if
self
.
max_size
>
0
and
np
.
round
(
scale
*
im_long_size
)
>
self
.
max_size
:
if
self
.
max_size
>
0
and
np
.
round
(
scale
*
im_long_size
)
>
self
.
max_size
:
scale
=
float
(
self
.
max_size
)
/
float
(
im_long_size
)
resized_width
=
int
(
round
(
im
.
shape
[
1
]
*
scale
))
resized_height
=
int
(
round
(
im
.
shape
[
0
]
*
scale
))
...
...
paddlex/deploy.py
浏览文件 @
39347594
...
...
@@ -144,7 +144,7 @@ class Predictor:
res
[
'im_info'
]
=
im_resize_info
res
[
'im_shape'
]
=
im_shape
elif
self
.
model_type
==
"segmenter"
:
im
,
im_i
m
fo
=
DeepLabv3p
.
_preprocess
(
im
,
im_i
n
fo
=
DeepLabv3p
.
_preprocess
(
image
,
self
.
transforms
,
self
.
model_type
,
...
...
编辑
预览
Markdown
is supported
0%
请重试
或
添加新附件
.
添加附件
取消
You are about to add
0
people
to the discussion. Proceed with caution.
先完成此消息的编辑!
取消
想要评论请
注册
或
登录
{kind=link}
{kind=link}