add bipointnet. (#1727)
Showing
example/BiPointNet/README.md
0 → 100644
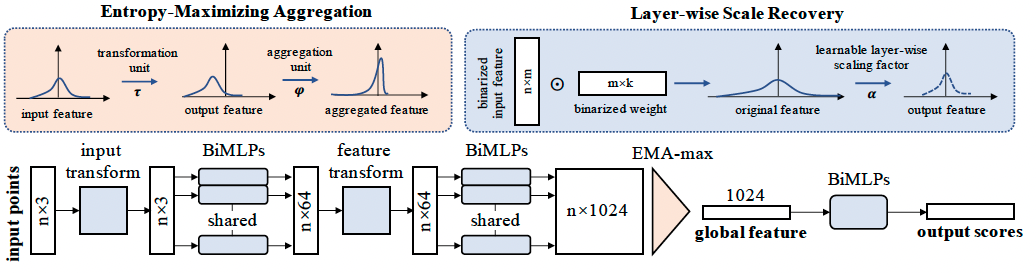
example/BiPointNet/arch.png
0 → 100644
{kind=link}
165.8 KB
example/BiPointNet/basic.py
0 → 100644
example/BiPointNet/data.py
0 → 100644
example/BiPointNet/model.py
0 → 100644
example/BiPointNet/test.py
0 → 100644
example/BiPointNet/train.py
0 → 100644