First commit
Showing
configs/cityscape.yaml
0 → 100644
configs/coco.yaml
0 → 100644
configs/humanseg.yaml
0 → 100644
configs/line.yaml
0 → 100644
configs/unet_pet.yaml
0 → 100644
contrib/ACE2P/README.md
0 → 100644
contrib/ACE2P/__init__.py
0 → 100644
contrib/ACE2P/config.py
0 → 100644
contrib/ACE2P/imgs/net.jpg
0 → 100644
{kind=link}

101.5 KB
contrib/ACE2P/imgs/result.jpg
0 → 100644
{kind=link}

146.5 KB
contrib/ACE2P/reader.py
0 → 100644
contrib/HumanSeg/__init__.py
0 → 100644
contrib/HumanSeg/config.py
0 → 100644
contrib/README.md
0 → 100644
contrib/RoadLine/__init__.py
0 → 100644
contrib/RoadLine/config.py
0 → 100644
contrib/imgs/Human.jpg
0 → 100644
{kind=link}

491.7 KB
contrib/imgs/HumanSeg.jpg
0 → 100644
{kind=link}

489.3 KB
contrib/imgs/RoadLine.jpg
0 → 100644
{kind=link}

450.3 KB
contrib/imgs/RoadLine.png
0 → 100644
{kind=link}

3.7 KB
contrib/infer.py
0 → 100644
contrib/utils/__init__.py
0 → 100644
contrib/utils/palette.py
0 → 100644
contrib/utils/util.py
0 → 100644
docs/annotation/README.md
0 → 100644
{kind=link}

133.8 KB
docs/annotation/labelme2seg.py
0 → 100755
docs/benchmark.md
0 → 100644
docs/config.md
0 → 100644
docs/configs/.gitkeep
0 → 100644
docs/configs/basic_group.md
0 → 100644
docs/configs/dataloader_group.md
0 → 100644
docs/configs/dataset_group.md
0 → 100644
docs/configs/freeze_group.md
0 → 100644
docs/configs/model_group.md
0 → 100644
docs/configs/model_icnet_group.md
0 → 100644
docs/configs/model_unet_group.md
0 → 100644
docs/configs/solver_group.md
0 → 100644
docs/configs/test_group.md
0 → 100644
docs/configs/train_group.md
0 → 100644
docs/data_aug.md
0 → 100644
docs/data_prepare.md
0 → 100644
docs/deploy.md
0 → 100644
docs/imgs/annotation/image-1.png
0 → 100644
{kind=link}

8.3 KB
docs/imgs/annotation/image-2.png
0 → 100644
{kind=link}

74.8 KB
docs/imgs/annotation/image-3.png
0 → 100644
{kind=link}

81.6 KB
{kind=link}

78.0 KB
{kind=link}

75.8 KB
docs/imgs/annotation/image-5.png
0 → 100644
{kind=link}

15.0 KB
docs/imgs/annotation/image-6.png
0 → 100644
{kind=link}
15.2 KB
docs/imgs/annotation/image-7.png
0 → 100644
{kind=link}

10.1 KB
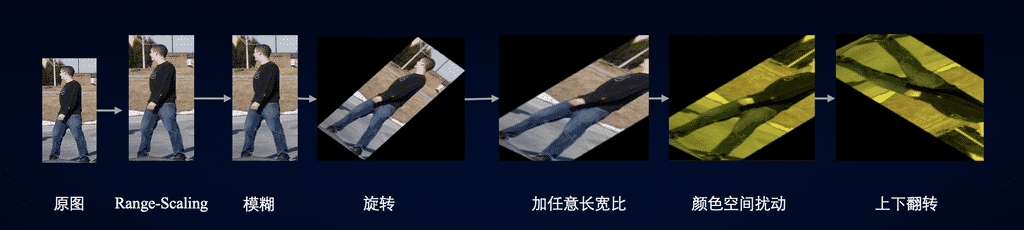
docs/imgs/aug_method.png
0 → 100644
{kind=link}

91.2 KB
{kind=link}

18.4 KB
docs/imgs/data_aug_example.png
0 → 100644
{kind=link}
44.8 KB
docs/imgs/data_aug_flow.png
0 → 100644
{kind=link}

153.4 KB
docs/imgs/deeplabv3p.png
0 → 100644
{kind=link}

269.2 KB
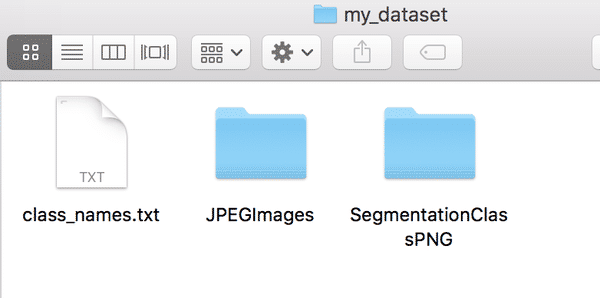
docs/imgs/file_list.png
0 → 100644
{kind=link}

88.2 KB
docs/imgs/gn.png
0 → 100644
{kind=link}

126.9 KB
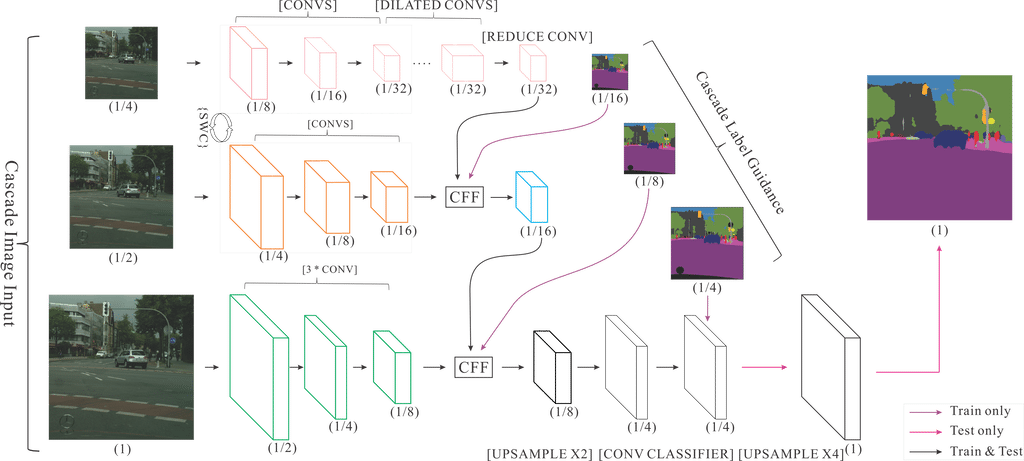
docs/imgs/icnet.png
0 → 100644
{kind=link}
68.9 KB
{kind=link}

23.0 KB
docs/imgs/poly_decay_example.png
0 → 100644
{kind=link}

135.7 KB
docs/imgs/rangescale.png
0 → 100644
{kind=link}

13.1 KB
docs/imgs/tensorboard_image.JPG
0 → 100644
{kind=link}

120.1 KB
docs/imgs/tensorboard_scalar.JPG
0 → 100644
{kind=link}

193.4 KB
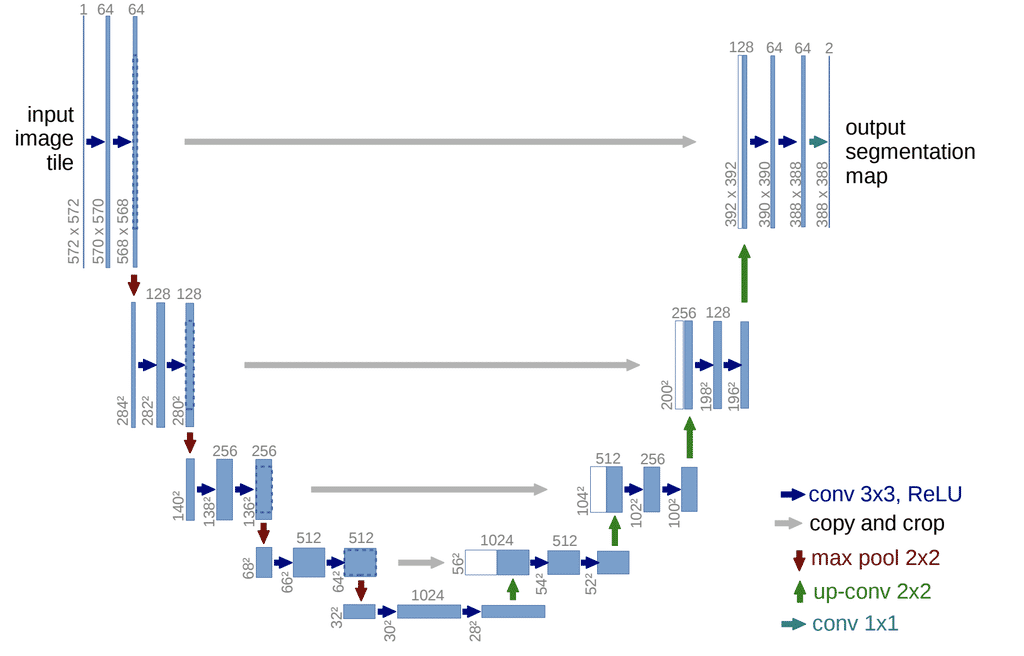
docs/imgs/unet.png
0 → 100644
{kind=link}
35.7 KB
docs/installation.md
0 → 100644
docs/model_zoo.md
0 → 100644
docs/models.md
0 → 100644
docs/usage.md
0 → 100644
inference/CMakeLists.txt
0 → 100644
inference/CMakeSettings.json
0 → 100644
inference/INSTALL.md
0 → 100644
inference/LICENSE
0 → 100644
inference/README.md
0 → 100644
inference/conf/humanseg.yaml
0 → 100644
inference/demo.cpp
0 → 100644
inference/images/humanseg/1.jpg
0 → 100644
{kind=link}

136.5 KB
inference/images/humanseg/10.jpg
0 → 100644
{kind=link}

105.1 KB
inference/images/humanseg/11.jpg
0 → 100644
{kind=link}

163.5 KB
inference/images/humanseg/12.jpg
0 → 100644
{kind=link}

53.3 KB
inference/images/humanseg/13.jpg
0 → 100644
{kind=link}
120.9 KB
inference/images/humanseg/14.jpg
0 → 100644
{kind=link}

146.9 KB
inference/images/humanseg/2.jpg
0 → 100644
{kind=link}

132.9 KB
inference/images/humanseg/3.jpg
0 → 100644
{kind=link}

98.1 KB
inference/images/humanseg/4.jpg
0 → 100644
{kind=link}

124.1 KB
inference/images/humanseg/5.jpg
0 → 100644
{kind=link}

159.8 KB
inference/images/humanseg/6.jpg
0 → 100644
{kind=link}

172.9 KB
inference/images/humanseg/7.jpg
0 → 100644
{kind=link}

143.9 KB
inference/images/humanseg/8.jpg
0 → 100644
{kind=link}

157.3 KB
inference/images/humanseg/9.jpg
0 → 100644
{kind=link}

120.7 KB
{kind=link}

491.7 KB
{kind=link}

369.3 KB
inference/tools/visualize.py
0 → 100644
inference/utils/seg_conf_parser.h
0 → 100644
inference/utils/utils.h
0 → 100644
pdseg/__init__.py
0 → 100644
pdseg/check.py
0 → 100644
pdseg/data_aug.py
0 → 100644
pdseg/data_utils.py
0 → 100644
pdseg/eval.py
0 → 100644
pdseg/export_model.py
0 → 100644
pdseg/loss.py
0 → 100644
pdseg/metrics.py
0 → 100644
pdseg/models/__init__.py
0 → 100644
pdseg/models/backbone/__init__.py
0 → 100644
pdseg/models/backbone/resnet.py
0 → 100644
pdseg/models/backbone/xception.py
0 → 100644
pdseg/models/libs/__init__.py
0 → 100644
pdseg/models/libs/model_libs.py
0 → 100644
pdseg/models/model_builder.py
0 → 100644
pdseg/models/modeling/__init__.py
0 → 100644
pdseg/models/modeling/deeplab.py
0 → 100644
pdseg/models/modeling/icnet.py
0 → 100644
pdseg/models/modeling/unet.py
0 → 100644
pdseg/reader.py
0 → 100644
pdseg/solver.py
0 → 100644
pdseg/train.py
0 → 100644
pdseg/utils/__init__.py
0 → 100644
pdseg/utils/collect.py
0 → 100644
pdseg/utils/config.py
0 → 100644
pdseg/utils/fp16_utils.py
0 → 100644
pdseg/utils/timer.py
0 → 100644
pdseg/vis.py
0 → 100644
requirements.txt
0 → 100644
| pre-commit | |||
| yapf == 0.26.0 | |||
| flake8 | |||
| pyyaml | |||
| tb-paddle | |||
| tb-nightly == 1.15.0a20190818 | |||
| Pillow | |||
| numpy | |||
| six | |||
| opencv-python |
serving/COMPILE_GUIDE.md
0 → 100644
serving/README.md
0 → 100644
serving/imgs/GF1_PMS1_sino0_0.png
0 → 100644
{kind=link}

322.8 KB
serving/imgs/GF1_PMS1_sino0_1.png
0 → 100644
{kind=link}

300.7 KB
serving/imgs/GF1_PMS1_sino0_2.png
0 → 100644
{kind=link}

309.2 KB
serving/imgs/GF1_PMS1_sino0_3.png
0 → 100644
{kind=link}

296.9 KB
serving/imgs/GF1_PMS1_sino0_4.png
0 → 100644
{kind=link}

296.0 KB
serving/imgs/GF1_PMS1_sino0_5.png
0 → 100644
{kind=link}

317.7 KB
serving/imgs/GF1_PMS1_sino0_6.png
0 → 100644
{kind=link}

335.6 KB
serving/imgs/GF1_PMS1_sino0_7.png
0 → 100644
{kind=link}

399.2 KB
serving/imgs/GF1_PMS1_sino0_8.png
0 → 100644
{kind=link}

331.6 KB
serving/imgs/GF1_PMS1_sino0_9.png
0 → 100644
{kind=link}

305.7 KB
serving/requirements.txt
0 → 100644
serving/seg-serving/op/seg_conf.h
0 → 100644
serving/tools/image_seg_client.py
0 → 100644
serving/tools/images/1.jpg
0 → 100755
{kind=link}

3.3 MB
serving/tools/images/2.jpg
0 → 100755
{kind=link}

3.1 MB
serving/tools/images/3.jpg
0 → 100755
{kind=link}

63.1 KB
test/configs/unet_coco.yaml
0 → 100644
test/configs/unet_pet.yaml
0 → 100644
test/local_test_cityscapes.py
0 → 100644
test/local_test_pet.py
0 → 100644
test/test_utils.py
0 → 100644