Merge branch 'develop' of https://github.com/PaddlePaddle/PaddleSeg into develop
Showing
configs/cityscape_fast_scnn.yaml
0 → 100644
configs/fast_scnn_pet.yaml
0 → 100644
slim/distillation/README.md
0 → 100644
slim/distillation/cityscape.yaml
0 → 100644
此差异已折叠。
slim/nas/README.md
0 → 100644
slim/nas/deeplab.py
0 → 100644
slim/nas/eval_nas.py
0 → 100644
slim/nas/model_builder.py
0 → 100644
slim/nas/train_nas.py
0 → 100644
slim/prune/README.md
0 → 100644
slim/prune/eval_prune.py
0 → 100644
slim/prune/train_prune.py
0 → 100644
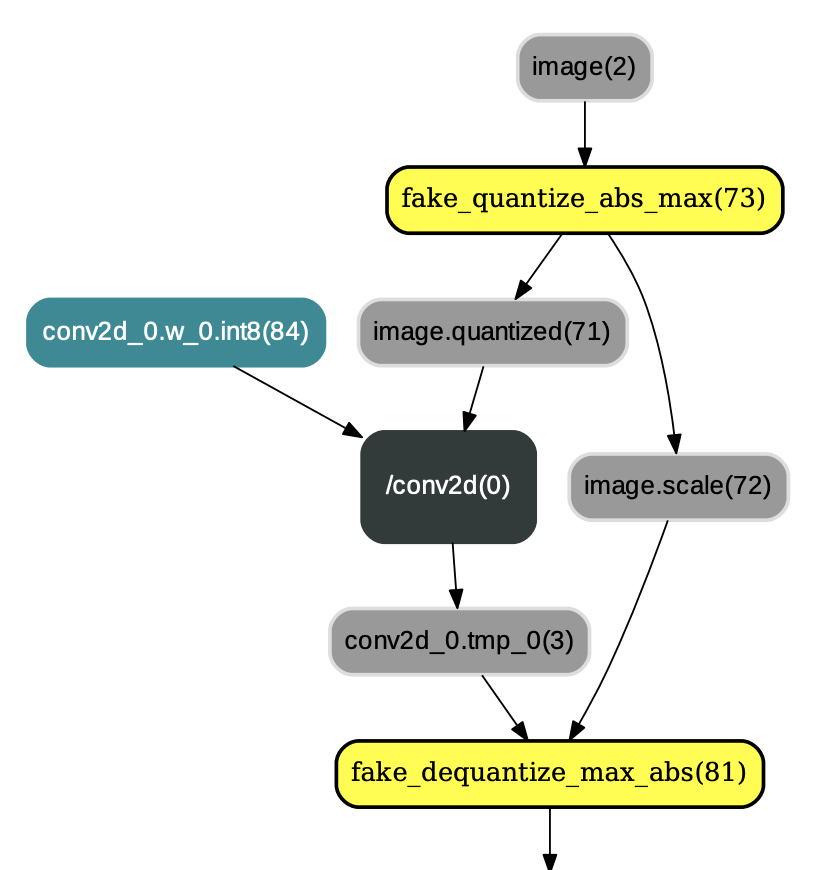
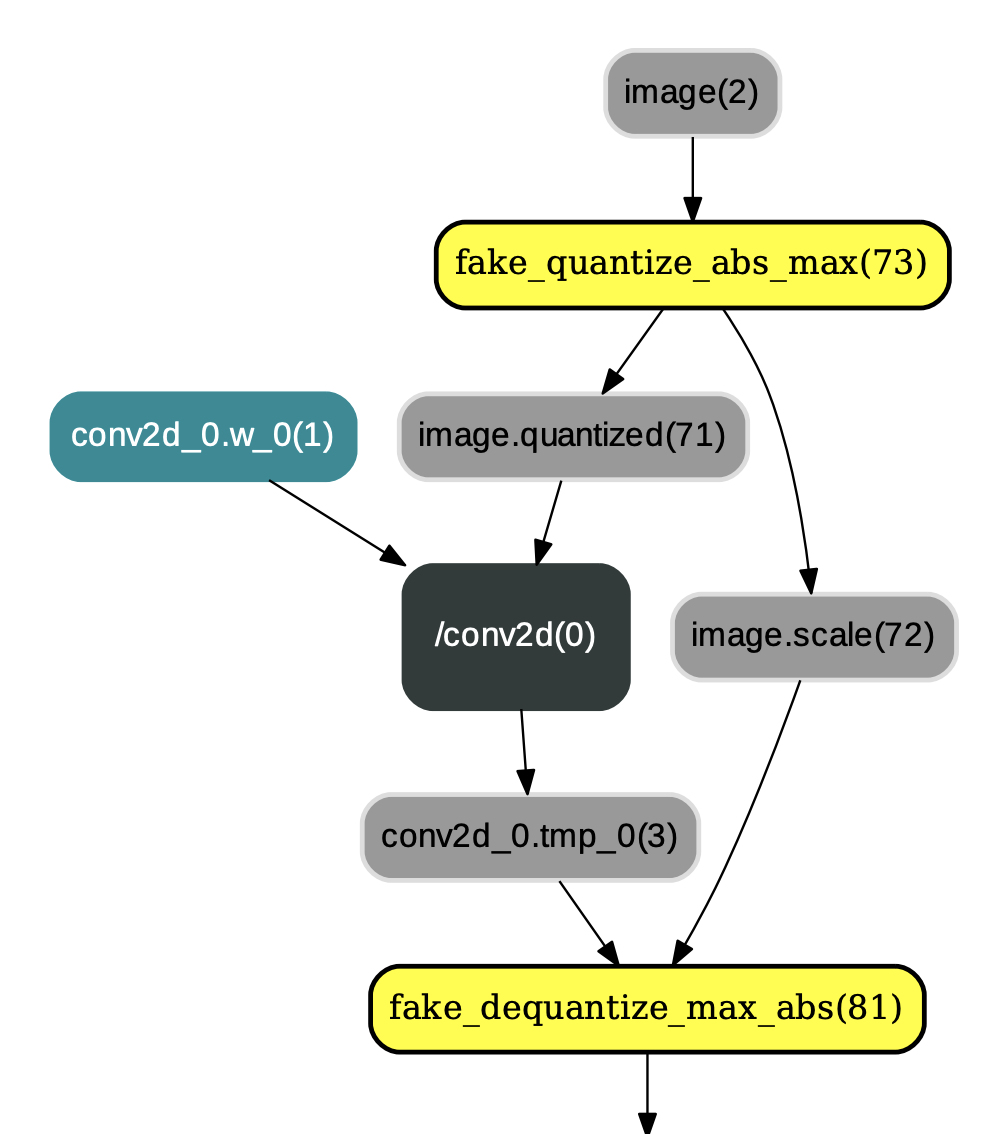
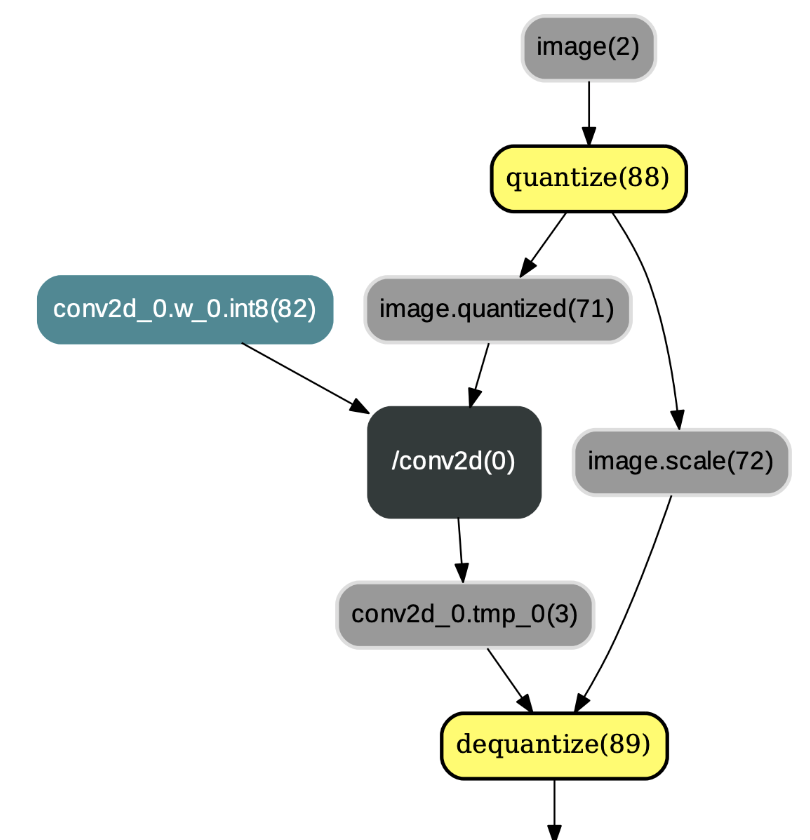
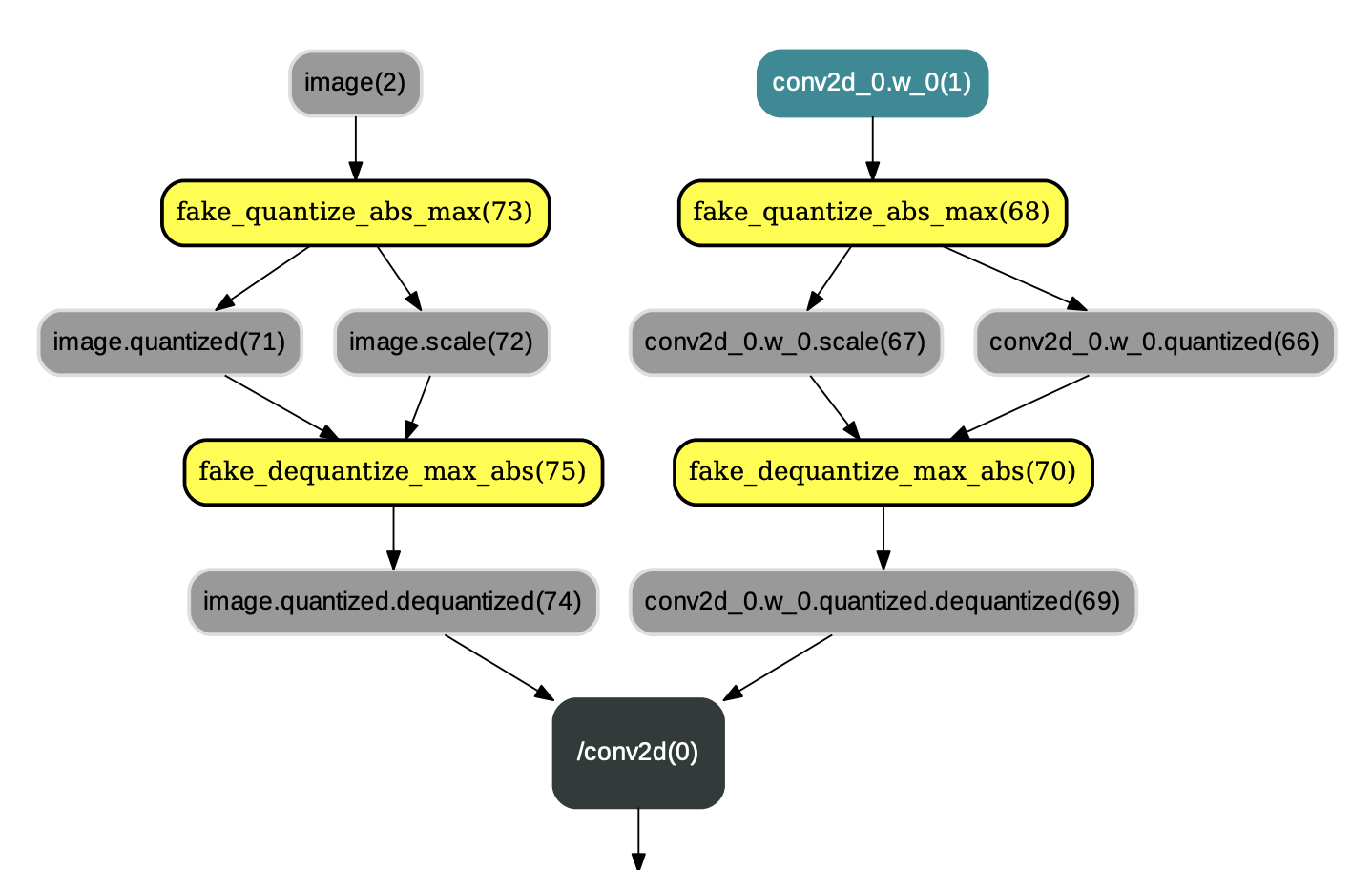
slim/quantization/README.md
0 → 100644
slim/quantization/eval_quant.py
0 → 100644
{kind=link}
85.6 KB
{kind=link}
110.9 KB
{kind=link}
91.4 KB
{kind=link}
132.4 KB
slim/quantization/train_quant.py
0 → 100644
turtorial/finetune_fast_scnn.md
0 → 100644