Skip to content
体验新版
项目
组织
正在加载...
登录
切换导航
打开侧边栏
PaddlePaddle
PaddleHub
提交
d76d727e
P
PaddleHub
项目概览
PaddlePaddle
/
PaddleHub
大约 2 年 前同步成功
通知
285
Star
12117
Fork
2091
代码
文件
提交
分支
Tags
贡献者
分支图
Diff
Issue
200
列表
看板
标记
里程碑
合并请求
4
Wiki
0
Wiki
分析
仓库
DevOps
项目成员
Pages
P
PaddleHub
项目概览
项目概览
详情
发布
仓库
仓库
文件
提交
分支
标签
贡献者
分支图
比较
Issue
200
Issue
200
列表
看板
标记
里程碑
合并请求
4
合并请求
4
Pages
分析
分析
仓库分析
DevOps
Wiki
0
Wiki
成员
成员
收起侧边栏
关闭侧边栏
动态
分支图
创建新Issue
提交
Issue看板
未验证
提交
d76d727e
编写于
2月 04, 2021
作者:
jm_12138
提交者:
GitHub
2月 04, 2021
浏览文件
操作
浏览文件
下载
电子邮件补丁
差异文件
Add SkyAR module (#1218)
上级
12267027
变更
18
隐藏空白更改
内联
并排
Showing
18 changed file
with
667 addition
and
0 deletion
+667
-0
modules/thirdparty/video/Video_editing/SkyAR/README.md
modules/thirdparty/video/Video_editing/SkyAR/README.md
+109
-0
modules/thirdparty/video/Video_editing/SkyAR/__init__.py
modules/thirdparty/video/Video_editing/SkyAR/__init__.py
+1
-0
modules/thirdparty/video/Video_editing/SkyAR/module.py
modules/thirdparty/video/Video_editing/SkyAR/module.py
+73
-0
modules/thirdparty/video/Video_editing/SkyAR/rain.py
modules/thirdparty/video/Video_editing/SkyAR/rain.py
+62
-0
modules/thirdparty/video/Video_editing/SkyAR/rain_streaks/videoplayback.mp4
.../video/Video_editing/SkyAR/rain_streaks/videoplayback.mp4
+0
-0
modules/thirdparty/video/Video_editing/SkyAR/skybox.py
modules/thirdparty/video/Video_editing/SkyAR/skybox.py
+202
-0
modules/thirdparty/video/Video_editing/SkyAR/skybox/cloudy.jpg
...es/thirdparty/video/Video_editing/SkyAR/skybox/cloudy.jpg
+0
-0
modules/thirdparty/video/Video_editing/SkyAR/skybox/district9ship.jpg
...dparty/video/Video_editing/SkyAR/skybox/district9ship.jpg
+0
-0
modules/thirdparty/video/Video_editing/SkyAR/skybox/floatingcastle.jpg
...party/video/Video_editing/SkyAR/skybox/floatingcastle.jpg
+0
-0
modules/thirdparty/video/Video_editing/SkyAR/skybox/galaxy.jpg
...es/thirdparty/video/Video_editing/SkyAR/skybox/galaxy.jpg
+0
-0
modules/thirdparty/video/Video_editing/SkyAR/skybox/jupiter.jpg
...s/thirdparty/video/Video_editing/SkyAR/skybox/jupiter.jpg
+0
-0
modules/thirdparty/video/Video_editing/SkyAR/skybox/rainy.jpg
...les/thirdparty/video/Video_editing/SkyAR/skybox/rainy.jpg
+0
-0
modules/thirdparty/video/Video_editing/SkyAR/skybox/sunny.jpg
...les/thirdparty/video/Video_editing/SkyAR/skybox/sunny.jpg
+0
-0
modules/thirdparty/video/Video_editing/SkyAR/skybox/sunset.jpg
...es/thirdparty/video/Video_editing/SkyAR/skybox/sunset.jpg
+0
-0
modules/thirdparty/video/Video_editing/SkyAR/skybox/supermoon.jpg
...thirdparty/video/Video_editing/SkyAR/skybox/supermoon.jpg
+0
-0
modules/thirdparty/video/Video_editing/SkyAR/skybox/thunderstorm.mp4
...rdparty/video/Video_editing/SkyAR/skybox/thunderstorm.mp4
+0
-0
modules/thirdparty/video/Video_editing/SkyAR/skyfilter.py
modules/thirdparty/video/Video_editing/SkyAR/skyfilter.py
+101
-0
modules/thirdparty/video/Video_editing/SkyAR/utils.py
modules/thirdparty/video/Video_editing/SkyAR/utils.py
+119
-0
未找到文件。
modules/thirdparty/video/Video_editing/SkyAR/README.md
0 → 100644
浏览文件 @
d76d727e
## 模型概述
*
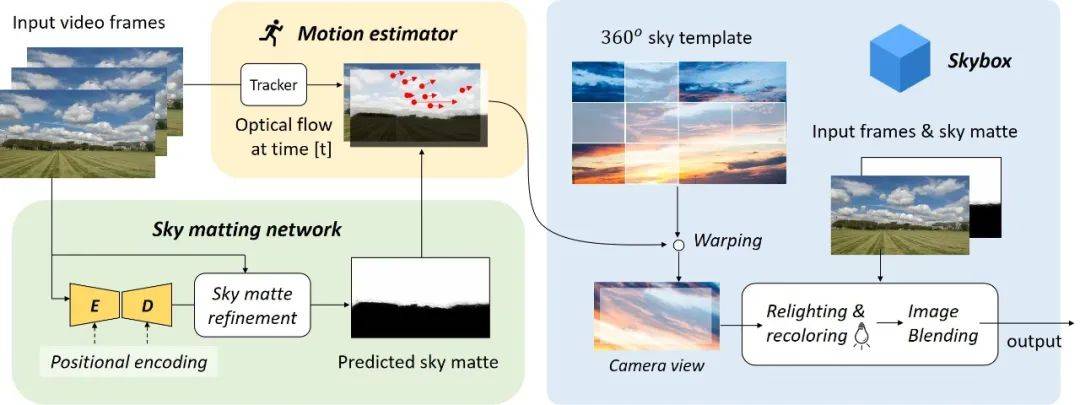
SkyAR 是一种用于视频中天空置换与协调的视觉方法,该方法能够在风格可控的视频中自动生成逼真的天空背景。
*
该算法是一种完全基于视觉的解决方案,它的好处就是可以处理非静态图像,同时不受拍摄设备的限制,也不需要用户交互,可以处理在线或离线视频。
*
算法主要由三个核心组成:
*
天空抠图网络(Sky Matting Network):就是一种 Matting 图像分隔,用于检测视频帧中天空区域的视频,可以精确地获得天空蒙版。
*
运动估计(Motion Estimation):恢复天空运动的运动估计器,使生成的天空与摄像机的运动同步。
*
图像融合(Image Blending):将用户指定的天空模板混合到视频帧中。除此之外,还用于重置和着色,使混合结果在其颜色和动态范围内更具视觉逼真感。
*
整体框架图如下:
*
参考论文:Zhengxia Zou.
[
Castle in the Sky: Dynamic Sky Replacement and Harmonization in Videos
](
https://arxiv.org/abs/2010.11800
)
. CoRR, abs/2010.118003, 2020.
*
官方开源项目:
[
jiupinjia/SkyAR
](
https://github.com/jiupinjia/SkyAR
)
## 模型安装
```
shell
$hub
install
SkyAR
```
## 效果展示
*
原始视频:

*
木星:
*
雨天:
*
银河:

*
第九区飞船:
*
原始视频:

*
漂浮城堡:
*
电闪雷鸣:
*
超级月亮:

## API 说明
```
python
def
MagicSky
(
video_path
,
save_path
,
config
=
'jupiter'
,
is_rainy
=
False
,
preview_frames_num
=
0
,
is_video_sky
=
False
,
is_show
=
False
,
skybox_img
=
None
,
skybox_video
=
None
,
rain_cap_path
=
None
,
halo_effect
=
True
,
auto_light_matching
=
False
,
relighting_factor
=
0.8
,
recoloring_factor
=
0.5
,
skybox_center_crop
=
0.5
)
```
深度估计API
**参数**
*
video_path(str):输入视频路径
*
save_path(str):视频保存路径
*
config(str): 预设 SkyBox 配置,所有预设配置如下,如果使用自定义 SkyBox,请设置为 None:
```
[
'cloudy', 'district9ship', 'floatingcastle', 'galaxy', 'jupiter',
'rainy', 'sunny', 'sunset', 'supermoon', 'thunderstorm'
]
```
*
skybox_img(str):自定义的 SkyBox 图像路径
*
skybox_video(str):自定义的 SkyBox 视频路径
*
is_video_sky(bool):自定义 SkyBox 是否为视频
*
rain_cap_path(str):自定义下雨效果视频路径
*
is_rainy(bool): 天空是否下雨
*
halo_effect(bool):是否开启 halo effect
*
auto_light_matching(bool):是否开启自动亮度匹配
*
relighting_factor(float): Relighting factor
*
recoloring_factor(float): Recoloring factor
*
skybox_center_crop(float):SkyBox center crop factor
*
preview_frames_num(int):设置预览帧数量,即只处理开头这几帧,设为 0,则为全部处理
*
is_show(bool):是否图形化预览
## 预测代码示例
```
python
import
paddlehub
as
hub
model
=
hub
.
Module
(
name
=
'SkyAR'
)
model
.
MagicSky
(
video_path
=
[
path
to
input
video
path
],
save_path
=
[
path
to
save
video
path
]
)
```
## 模型相关信息
### 模型代码
https://github.com/jm12138/SkyAR_Paddle_GUI
### 依赖
paddlepaddle >= 2.0.0rc0
paddlehub >= 2.0.0rc0
modules/thirdparty/video/Video_editing/SkyAR/__init__.py
0 → 100644
浏览文件 @
d76d727e
modules/thirdparty/video/Video_editing/SkyAR/module.py
0 → 100644
浏览文件 @
d76d727e
import
os
import
paddle.nn
as
nn
from
.skyfilter
import
SkyFilter
from
paddlehub.module.module
import
moduleinfo
@
moduleinfo
(
name
=
"SkyAR"
,
type
=
"CV/Video_editing"
,
author
=
"jm12138"
,
author_email
=
""
,
summary
=
"SkyAR"
,
version
=
"1.0.0"
)
class
SkyAR
(
nn
.
Layer
):
def
__init__
(
self
,
model_path
=
None
):
super
(
SkyAR
,
self
).
__init__
()
self
.
imgs
=
[
'cloudy'
,
'district9ship'
,
'floatingcastle'
,
'galaxy'
,
'jupiter'
,
'rainy'
,
'sunny'
,
'sunset'
,
'supermoon'
]
self
.
videos
=
[
'thunderstorm'
]
if
model_path
:
self
.
model_path
=
model_path
else
:
self
.
model_path
=
os
.
path
.
join
(
self
.
directory
,
'./ResNet50FCN'
)
def
MagicSky
(
self
,
video_path
,
save_path
,
config
=
'jupiter'
,
is_rainy
=
False
,
preview_frames_num
=
0
,
is_video_sky
=
False
,
is_show
=
False
,
skybox_img
=
None
,
skybox_video
=
None
,
rain_cap_path
=
None
,
halo_effect
=
True
,
auto_light_matching
=
False
,
relighting_factor
=
0.8
,
recoloring_factor
=
0.5
,
skybox_center_crop
=
0.5
):
if
config
in
self
.
imgs
:
skybox_img
=
os
.
path
.
join
(
self
.
directory
,
'skybox'
,
'%s.jpg'
%
config
)
skybox_video
=
None
is_video_sky
=
False
elif
config
in
self
.
videos
:
skybox_img
=
None
skybox_video
=
os
.
path
.
join
(
self
.
directory
,
'skybox'
,
'%s.mp4'
%
config
)
is_video_sky
=
True
elif
skybox_img
:
is_video_sky
=
False
skybox_video
=
None
elif
is_video_sky
and
skybox_video
:
skybox_img
=
None
else
:
raise
'please check your configs'
if
not
rain_cap_path
:
rain_cap_path
=
os
.
path
.
join
(
self
.
directory
,
'rain_streaks'
,
'videoplayback.mp4'
)
skyfilter
=
SkyFilter
(
model_path
=
self
.
model_path
,
video_path
=
video_path
,
save_path
=
save_path
,
in_size
=
(
384
,
384
),
halo_effect
=
halo_effect
,
auto_light_matching
=
auto_light_matching
,
relighting_factor
=
relighting_factor
,
recoloring_factor
=
recoloring_factor
,
skybox_center_crop
=
skybox_center_crop
,
rain_cap_path
=
rain_cap_path
,
skybox_img
=
skybox_img
,
skybox_video
=
skybox_video
,
is_video
=
is_video_sky
,
is_rainy
=
is_rainy
,
is_show
=
is_show
)
skyfilter
.
run
(
preview_frames_num
)
modules/thirdparty/video/Video_editing/SkyAR/rain.py
0 → 100644
浏览文件 @
d76d727e
import
cv2
import
numpy
as
np
__all__
=
[
'Rain'
]
class
Rain
():
def
__init__
(
self
,
rain_cap_path
,
rain_intensity
=
1.0
,
haze_intensity
=
4.0
,
gamma
=
2.0
,
light_correction
=
0.9
):
self
.
rain_intensity
=
rain_intensity
self
.
haze_intensity
=
haze_intensity
self
.
gamma
=
gamma
self
.
light_correction
=
light_correction
self
.
frame_id
=
1
self
.
cap
=
cv2
.
VideoCapture
(
rain_cap_path
)
def
_get_rain_layer
(
self
):
ret
,
frame
=
self
.
cap
.
read
()
if
ret
:
rain_layer
=
frame
else
:
# if reach the last frame, read from the begining
self
.
cap
.
set
(
cv2
.
CAP_PROP_POS_FRAMES
,
0
)
ret
,
frame
=
self
.
cap
.
read
()
rain_layer
=
frame
rain_layer
=
cv2
.
cvtColor
(
rain_layer
,
cv2
.
COLOR_BGR2RGB
)
/
255.0
rain_layer
=
np
.
array
(
rain_layer
,
dtype
=
np
.
float32
)
return
rain_layer
def
_create_haze_layer
(
self
,
rain_layer
):
return
0.1
*
np
.
ones_like
(
rain_layer
)
def
forward
(
self
,
img
):
# get input image size
h
,
w
,
c
=
img
.
shape
# create a rain layer
rain_layer
=
self
.
_get_rain_layer
()
rain_layer
=
cv2
.
resize
(
rain_layer
,
(
w
,
h
))
rain_layer
=
cv2
.
blur
(
rain_layer
,
(
3
,
3
))
rain_layer
=
rain_layer
*
\
(
1
-
cv2
.
boxFilter
(
img
,
-
1
,
(
int
(
w
/
10
),
int
(
h
/
10
))))
# create a haze layer
haze_layer
=
self
.
_create_haze_layer
(
rain_layer
)
# combine the rain layer and haze layer together
rain_layer
=
self
.
rain_intensity
*
rain_layer
+
\
self
.
haze_intensity
*
haze_layer
# synthesize an output image (screen blend)
img_out
=
1
-
(
1
-
rain_layer
)
*
(
1
-
img
)
# gamma and light correction
img_out
=
self
.
light_correction
*
(
img_out
**
self
.
gamma
)
# check boundary
img_out
=
np
.
clip
(
img_out
,
a_min
=
0
,
a_max
=
1.
)
return
img_out
modules/thirdparty/video/Video_editing/SkyAR/rain_streaks/videoplayback.mp4
0 → 100644
浏览文件 @
d76d727e
文件已添加
modules/thirdparty/video/Video_editing/SkyAR/skybox.py
0 → 100644
浏览文件 @
d76d727e
import
cv2
import
numpy
as
np
from
.rain
import
Rain
from
.utils
import
build_transformation_matrix
,
update_transformation_matrix
,
estimate_partial_transform
,
removeOutliers
,
guidedfilter
class
SkyBox
():
def
__init__
(
self
,
out_size
,
skybox_img
,
skybox_video
,
halo_effect
,
auto_light_matching
,
relighting_factor
,
recoloring_factor
,
skybox_center_crop
,
rain_cap_path
,
is_video
,
is_rainy
):
self
.
out_size_w
,
self
.
out_size_h
=
out_size
self
.
skybox_img
=
skybox_img
self
.
skybox_video
=
skybox_video
self
.
is_rainy
=
is_rainy
self
.
is_video
=
is_video
self
.
halo_effect
=
halo_effect
self
.
auto_light_matching
=
auto_light_matching
self
.
relighting_factor
=
relighting_factor
self
.
recoloring_factor
=
recoloring_factor
self
.
skybox_center_crop
=
skybox_center_crop
self
.
load_skybox
()
self
.
rainmodel
=
Rain
(
rain_cap_path
=
rain_cap_path
,
rain_intensity
=
0.8
,
haze_intensity
=
0.0
,
gamma
=
1.0
,
light_correction
=
1.0
)
# motion parameters
self
.
M
=
np
.
array
([[
1
,
0
,
0
],
[
0
,
1
,
0
]],
dtype
=
np
.
float32
)
self
.
frame_id
=
0
def
tile_skybox_img
(
self
,
imgtile
):
screen_y1
=
int
(
imgtile
.
shape
[
0
]
/
2
-
self
.
out_size_h
/
2
)
screen_x1
=
int
(
imgtile
.
shape
[
1
]
/
2
-
self
.
out_size_w
/
2
)
imgtile
=
np
.
concatenate
(
[
imgtile
[
screen_y1
:,
:,
:],
imgtile
[
0
:
screen_y1
,
:,
:]],
axis
=
0
)
imgtile
=
np
.
concatenate
(
[
imgtile
[:,
screen_x1
:,
:],
imgtile
[:,
0
:
screen_x1
,
:]],
axis
=
1
)
return
imgtile
def
load_skybox
(
self
):
print
(
'initialize skybox...'
)
if
not
self
.
is_video
:
# static backgroud
skybox_img
=
cv2
.
imread
(
self
.
skybox_img
,
cv2
.
IMREAD_COLOR
)
skybox_img
=
cv2
.
cvtColor
(
skybox_img
,
cv2
.
COLOR_BGR2RGB
)
self
.
skybox_img
=
cv2
.
resize
(
skybox_img
,
(
self
.
out_size_w
,
self
.
out_size_h
))
cc
=
1.
/
self
.
skybox_center_crop
imgtile
=
cv2
.
resize
(
skybox_img
,
(
int
(
cc
*
self
.
out_size_w
),
int
(
cc
*
self
.
out_size_h
)))
self
.
skybox_imgx2
=
self
.
tile_skybox_img
(
imgtile
)
self
.
skybox_imgx2
=
np
.
expand_dims
(
self
.
skybox_imgx2
,
axis
=
0
)
else
:
# video backgroud
cap
=
cv2
.
VideoCapture
(
self
.
skybox_video
)
m_frames
=
int
(
cap
.
get
(
cv2
.
CAP_PROP_FRAME_COUNT
))
cc
=
1.
/
self
.
skybox_center_crop
self
.
skybox_imgx2
=
np
.
zeros
(
[
m_frames
,
int
(
cc
*
self
.
out_size_h
),
int
(
cc
*
self
.
out_size_w
),
3
],
np
.
uint8
)
for
i
in
range
(
m_frames
):
_
,
skybox_img
=
cap
.
read
()
skybox_img
=
cv2
.
cvtColor
(
skybox_img
,
cv2
.
COLOR_BGR2RGB
)
imgtile
=
cv2
.
resize
(
skybox_img
,
(
int
(
cc
*
self
.
out_size_w
),
int
(
cc
*
self
.
out_size_h
)))
skybox_imgx2
=
self
.
tile_skybox_img
(
imgtile
)
self
.
skybox_imgx2
[
i
,
:]
=
skybox_imgx2
def
skymask_refinement
(
self
,
G_pred
,
img
):
r
,
eps
=
20
,
0.01
refined_skymask
=
guidedfilter
(
img
[:,
:,
2
],
G_pred
[:,
:,
0
],
r
,
eps
)
refined_skymask
=
np
.
stack
(
[
refined_skymask
,
refined_skymask
,
refined_skymask
],
axis
=-
1
)
return
np
.
clip
(
refined_skymask
,
a_min
=
0
,
a_max
=
1
)
def
get_skybg_from_box
(
self
,
m
):
self
.
M
=
update_transformation_matrix
(
self
.
M
,
m
)
nbgs
,
bgh
,
bgw
,
c
=
self
.
skybox_imgx2
.
shape
fetch_id
=
self
.
frame_id
%
nbgs
skybg_warp
=
cv2
.
warpAffine
(
self
.
skybox_imgx2
[
fetch_id
,
:,
:,
:],
self
.
M
,
(
bgw
,
bgh
),
borderMode
=
cv2
.
BORDER_WRAP
)
skybg
=
skybg_warp
[
0
:
self
.
out_size_h
,
0
:
self
.
out_size_w
,
:]
self
.
frame_id
+=
1
return
np
.
array
(
skybg
,
np
.
float32
)
/
255.
def
skybox_tracking
(
self
,
frame
,
frame_prev
,
skymask
):
if
np
.
mean
(
skymask
)
<
0.05
:
print
(
'sky area is too small'
)
return
np
.
array
([[
1
,
0
,
0
],
[
0
,
1
,
0
]],
dtype
=
np
.
float32
)
prev_gray
=
cv2
.
cvtColor
(
frame_prev
,
cv2
.
COLOR_RGB2GRAY
)
prev_gray
=
np
.
array
(
255
*
prev_gray
,
dtype
=
np
.
uint8
)
curr_gray
=
cv2
.
cvtColor
(
frame
,
cv2
.
COLOR_RGB2GRAY
)
curr_gray
=
np
.
array
(
255
*
curr_gray
,
dtype
=
np
.
uint8
)
mask
=
np
.
array
(
skymask
[:,
:,
0
]
>
0.99
,
dtype
=
np
.
uint8
)
template_size
=
int
(
0.05
*
mask
.
shape
[
0
])
mask
=
cv2
.
erode
(
mask
,
np
.
ones
([
template_size
,
template_size
]))
# ShiTomasi corner detection
prev_pts
=
cv2
.
goodFeaturesToTrack
(
prev_gray
,
mask
=
mask
,
maxCorners
=
200
,
qualityLevel
=
0.01
,
minDistance
=
30
,
blockSize
=
3
)
if
prev_pts
is
None
:
print
(
'no feature point detected'
)
return
np
.
array
([[
1
,
0
,
0
],
[
0
,
1
,
0
]],
dtype
=
np
.
float32
)
# Calculate optical flow (i.e. track feature points)
curr_pts
,
status
,
err
=
cv2
.
calcOpticalFlowPyrLK
(
prev_gray
,
curr_gray
,
prev_pts
,
None
)
# Filter only valid points
idx
=
np
.
where
(
status
==
1
)[
0
]
if
idx
.
size
==
0
:
print
(
'no good point matched'
)
return
np
.
array
([[
1
,
0
,
0
],
[
0
,
1
,
0
]],
dtype
=
np
.
float32
)
prev_pts
,
curr_pts
=
removeOutliers
(
prev_pts
,
curr_pts
)
if
curr_pts
.
shape
[
0
]
<
10
:
print
(
'no good point matched'
)
return
np
.
array
([[
1
,
0
,
0
],
[
0
,
1
,
0
]],
dtype
=
np
.
float32
)
# limit the motion to translation + rotation
dxdyda
=
estimate_partial_transform
((
np
.
array
(
prev_pts
),
np
.
array
(
curr_pts
)))
m
=
build_transformation_matrix
(
dxdyda
)
return
m
def
relighting
(
self
,
img
,
skybg
,
skymask
):
# color matching, reference: skybox_img
step
=
int
(
img
.
shape
[
0
]
/
20
)
skybg_thumb
=
skybg
[::
step
,
::
step
,
:]
img_thumb
=
img
[::
step
,
::
step
,
:]
skymask_thumb
=
skymask
[::
step
,
::
step
,
:]
skybg_mean
=
np
.
mean
(
skybg_thumb
,
axis
=
(
0
,
1
),
keepdims
=
True
)
img_mean
=
np
.
sum
(
img_thumb
*
(
1
-
skymask_thumb
),
axis
=
(
0
,
1
),
keepdims
=
True
)
\
/
((
1
-
skymask_thumb
).
sum
(
axis
=
(
0
,
1
),
keepdims
=
True
)
+
1e-9
)
diff
=
skybg_mean
-
img_mean
img_colortune
=
img
+
self
.
recoloring_factor
*
diff
if
self
.
auto_light_matching
:
img
=
img_colortune
else
:
# keep foreground ambient_light and maunally adjust lighting
img
=
self
.
relighting_factor
*
\
(
img_colortune
+
(
img
.
mean
()
-
img_colortune
.
mean
()))
return
img
def
halo
(
self
,
syneth
,
skybg
,
skymask
):
# reflection
halo
=
0.5
*
cv2
.
blur
(
skybg
*
skymask
,
(
int
(
self
.
out_size_w
/
5
),
int
(
self
.
out_size_w
/
5
)))
# screen blend 1 - (1-a)(1-b)
syneth_with_halo
=
1
-
(
1
-
syneth
)
*
(
1
-
halo
)
return
syneth_with_halo
def
skyblend
(
self
,
img
,
img_prev
,
skymask
):
m
=
self
.
skybox_tracking
(
img
,
img_prev
,
skymask
)
skybg
=
self
.
get_skybg_from_box
(
m
)
img
=
self
.
relighting
(
img
,
skybg
,
skymask
)
syneth
=
img
*
(
1
-
skymask
)
+
skybg
*
skymask
if
self
.
halo_effect
:
# halo effect brings better visual realism but will slow down the speed
syneth
=
self
.
halo
(
syneth
,
skybg
,
skymask
)
if
self
.
is_rainy
:
syneth
=
self
.
rainmodel
.
forward
(
syneth
)
return
np
.
clip
(
syneth
,
a_min
=
0
,
a_max
=
1
)
modules/thirdparty/video/Video_editing/SkyAR/skybox/cloudy.jpg
0 → 100644
浏览文件 @
d76d727e
22.5 KB
modules/thirdparty/video/Video_editing/SkyAR/skybox/district9ship.jpg
0 → 100644
浏览文件 @
d76d727e
2.8 MB
modules/thirdparty/video/Video_editing/SkyAR/skybox/floatingcastle.jpg
0 → 100644
浏览文件 @
d76d727e
3.8 MB
modules/thirdparty/video/Video_editing/SkyAR/skybox/galaxy.jpg
0 → 100644
浏览文件 @
d76d727e
203.8 KB
modules/thirdparty/video/Video_editing/SkyAR/skybox/jupiter.jpg
0 → 100644
浏览文件 @
d76d727e
87.8 KB
modules/thirdparty/video/Video_editing/SkyAR/skybox/rainy.jpg
0 → 100644
浏览文件 @
d76d727e
46.9 KB
modules/thirdparty/video/Video_editing/SkyAR/skybox/sunny.jpg
0 → 100644
浏览文件 @
d76d727e
105.2 KB
modules/thirdparty/video/Video_editing/SkyAR/skybox/sunset.jpg
0 → 100644
浏览文件 @
d76d727e
91.0 KB
modules/thirdparty/video/Video_editing/SkyAR/skybox/supermoon.jpg
0 → 100644
浏览文件 @
d76d727e
2.4 MB
modules/thirdparty/video/Video_editing/SkyAR/skybox/thunderstorm.mp4
0 → 100644
浏览文件 @
d76d727e
文件已添加
modules/thirdparty/video/Video_editing/SkyAR/skyfilter.py
0 → 100644
浏览文件 @
d76d727e
import
os
import
cv2
import
paddle
import
numpy
as
np
from
.skybox
import
SkyBox
__all__
=
[
'SkyFilter'
]
class
SkyFilter
():
def
__init__
(
self
,
model_path
,
video_path
,
save_path
,
in_size
,
halo_effect
,
auto_light_matching
,
relighting_factor
,
recoloring_factor
,
skybox_center_crop
,
rain_cap_path
,
skybox_img
,
skybox_video
,
is_video
,
is_rainy
,
is_show
):
self
.
in_size
=
in_size
self
.
is_show
=
is_show
self
.
cap
=
cv2
.
VideoCapture
(
video_path
)
self
.
m_frames
=
int
(
self
.
cap
.
get
(
cv2
.
CAP_PROP_FRAME_COUNT
))
self
.
fps
=
self
.
cap
.
get
(
cv2
.
CAP_PROP_FPS
)
self
.
out_size
=
int
(
self
.
cap
.
get
(
cv2
.
CAP_PROP_FRAME_WIDTH
)),
int
(
self
.
cap
.
get
(
cv2
.
CAP_PROP_FRAME_HEIGHT
))
self
.
model
=
paddle
.
jit
.
load
(
model_path
,
model_filename
=
'__model__'
,
params_filename
=
'__params__'
)
self
.
model
.
eval
()
self
.
skyboxengine
=
SkyBox
(
out_size
=
self
.
out_size
,
skybox_img
=
skybox_img
,
skybox_video
=
skybox_video
,
halo_effect
=
halo_effect
,
auto_light_matching
=
auto_light_matching
,
relighting_factor
=
relighting_factor
,
recoloring_factor
=
recoloring_factor
,
skybox_center_crop
=
skybox_center_crop
,
rain_cap_path
=
rain_cap_path
,
is_video
=
is_video
,
is_rainy
=
is_rainy
)
path
,
_
=
os
.
path
.
split
(
save_path
)
if
path
==
''
:
path
=
'.'
if
not
os
.
path
.
exists
(
path
):
os
.
mkdir
(
path
)
self
.
video_writer
=
cv2
.
VideoWriter
(
save_path
,
cv2
.
VideoWriter_fourcc
(
*
'MP4V'
),
self
.
fps
,
self
.
out_size
)
def
synthesize
(
self
,
img_HD
,
img_HD_prev
):
h
,
w
,
_
=
img_HD
.
shape
img
=
cv2
.
resize
(
img_HD
,
self
.
in_size
)
img
=
np
.
array
(
img
,
dtype
=
np
.
float32
)
img
=
img
.
transpose
(
2
,
0
,
1
)
img
=
img
[
np
.
newaxis
,
...]
img
=
paddle
.
to_tensor
(
img
)
G_pred
=
self
.
model
(
img
)
G_pred
=
paddle
.
nn
.
functional
.
interpolate
(
G_pred
,
(
h
,
w
),
mode
=
'bicubic'
,
align_corners
=
False
)
G_pred
=
G_pred
[
0
,
:].
transpose
([
1
,
2
,
0
])
G_pred
=
paddle
.
concat
([
G_pred
,
G_pred
,
G_pred
],
axis
=-
1
)
G_pred
=
G_pred
.
detach
().
numpy
()
G_pred
=
np
.
clip
(
G_pred
,
a_max
=
1.0
,
a_min
=
0.0
)
skymask
=
self
.
skyboxengine
.
skymask_refinement
(
G_pred
,
img_HD
)
syneth
=
self
.
skyboxengine
.
skyblend
(
img_HD
,
img_HD_prev
,
skymask
)
return
syneth
,
G_pred
,
skymask
def
run
(
self
,
preview_frames_num
=
0
):
img_HD_prev
=
None
frames_num
=
preview_frames_num
if
0
<
preview_frames_num
<
self
.
m_frames
else
self
.
m_frames
print
(
'frames_num: %d, running evaluation...'
%
frames_num
)
for
idx
in
range
(
1
,
frames_num
+
1
):
ret
,
frame
=
self
.
cap
.
read
()
if
ret
:
frame
=
cv2
.
resize
(
frame
,
self
.
out_size
)
img_HD
=
cv2
.
cvtColor
(
frame
,
cv2
.
COLOR_BGR2RGB
)
img_HD
=
np
.
array
(
img_HD
/
255.
,
dtype
=
np
.
float32
)
if
img_HD_prev
is
None
:
img_HD_prev
=
img_HD
syneth
,
_
,
_
=
self
.
synthesize
(
img_HD
,
img_HD_prev
)
result
=
np
.
array
(
255.0
*
syneth
[:,
:,
::
-
1
],
dtype
=
np
.
uint8
)
self
.
video_writer
.
write
(
result
)
if
self
.
is_show
:
show_img
=
np
.
concatenate
([
frame
,
result
],
1
)
h
,
w
=
show_img
.
shape
[:
2
]
show_img
=
cv2
.
resize
(
show_img
,
(
720
,
int
(
720
/
w
*
h
)))
cv2
.
imshow
(
'preview'
,
show_img
)
k
=
cv2
.
waitKey
(
1
)
if
(
k
==
27
)
or
(
cv2
.
getWindowProperty
(
'preview'
,
0
)
==
-
1
):
self
.
video_writer
.
release
()
cv2
.
destroyAllWindows
()
break
print
(
'processing: %d / %d ...'
%
(
idx
,
frames_num
))
img_HD_prev
=
img_HD
else
:
self
.
video_writer
.
release
()
cv2
.
destroyAllWindows
()
break
modules/thirdparty/video/Video_editing/SkyAR/utils.py
0 → 100644
浏览文件 @
d76d727e
import
cv2
import
numpy
as
np
from
sklearn.neighbors
import
KernelDensity
__all__
=
[
'build_transformation_matrix'
,
'update_transformation_matrix'
,
'estimate_partial_transform'
,
'removeOutliers'
,
'guidedfilter'
]
def
build_transformation_matrix
(
transform
):
"""Convert transform list to transformation matrix
:param transform: transform list as [dx, dy, da]
:return: transform matrix as 2d (2, 3) numpy array
"""
transform_matrix
=
np
.
zeros
((
2
,
3
))
transform_matrix
[
0
,
0
]
=
np
.
cos
(
transform
[
2
])
transform_matrix
[
0
,
1
]
=
-
np
.
sin
(
transform
[
2
])
transform_matrix
[
1
,
0
]
=
np
.
sin
(
transform
[
2
])
transform_matrix
[
1
,
1
]
=
np
.
cos
(
transform
[
2
])
transform_matrix
[
0
,
2
]
=
transform
[
0
]
transform_matrix
[
1
,
2
]
=
transform
[
1
]
return
transform_matrix
def
update_transformation_matrix
(
M
,
m
):
# extend M and m to 3x3 by adding an [0,0,1] to their 3rd row
M_
=
np
.
concatenate
([
M
,
np
.
zeros
([
1
,
3
])],
axis
=
0
)
M_
[
-
1
,
-
1
]
=
1
m_
=
np
.
concatenate
([
m
,
np
.
zeros
([
1
,
3
])],
axis
=
0
)
m_
[
-
1
,
-
1
]
=
1
M_new
=
np
.
matmul
(
m_
,
M_
)
return
M_new
[
0
:
2
,
:]
def
estimate_partial_transform
(
matched_keypoints
):
"""Wrapper of cv2.estimateRigidTransform for convenience in vidstab process
:param matched_keypoints: output of match_keypoints util function; tuple of (cur_matched_kp, prev_matched_kp)
:return: transform as list of [dx, dy, da]
"""
prev_matched_kp
,
cur_matched_kp
=
matched_keypoints
transform
=
cv2
.
estimateAffinePartial2D
(
np
.
array
(
prev_matched_kp
),
np
.
array
(
cur_matched_kp
))[
0
]
if
transform
is
not
None
:
# translation x
dx
=
transform
[
0
,
2
]
# translation y
dy
=
transform
[
1
,
2
]
# rotation
da
=
np
.
arctan2
(
transform
[
1
,
0
],
transform
[
0
,
0
])
else
:
dx
=
dy
=
da
=
0
return
[
dx
,
dy
,
da
]
def
removeOutliers
(
prev_pts
,
curr_pts
):
d
=
np
.
sum
((
prev_pts
-
curr_pts
)
**
2
,
axis
=-
1
)
**
0.5
d_
=
np
.
array
(
d
).
reshape
(
-
1
,
1
)
kde
=
KernelDensity
(
kernel
=
'gaussian'
,
bandwidth
=
0.5
).
fit
(
d_
)
density
=
np
.
exp
(
kde
.
score_samples
(
d_
))
prev_pts
=
prev_pts
[
np
.
where
((
density
>=
0.1
))]
curr_pts
=
curr_pts
[
np
.
where
((
density
>=
0.1
))]
return
prev_pts
,
curr_pts
def
boxfilter
(
img
,
r
):
(
rows
,
cols
)
=
img
.
shape
imDst
=
np
.
zeros_like
(
img
)
imCum
=
np
.
cumsum
(
img
,
0
)
imDst
[
0
:
r
+
1
,
:]
=
imCum
[
r
:
2
*
r
+
1
,
:]
imDst
[
r
+
1
:
rows
-
r
,
:]
=
imCum
[
2
*
r
+
1
:
rows
,
:]
-
imCum
[
0
:
rows
-
2
*
r
-
1
,
:]
imDst
[
rows
-
r
:
rows
,
:]
=
np
.
tile
(
imCum
[
rows
-
1
,
:],
[
r
,
1
])
-
imCum
[
rows
-
2
*
r
-
1
:
rows
-
r
-
1
,
:]
imCum
=
np
.
cumsum
(
imDst
,
1
)
imDst
[:,
0
:
r
+
1
]
=
imCum
[:,
r
:
2
*
r
+
1
]
imDst
[:,
r
+
1
:
cols
-
r
]
=
imCum
[:,
2
*
r
+
1
:
cols
]
-
imCum
[:,
0
:
cols
-
2
*
r
-
1
]
imDst
[:,
cols
-
r
:
cols
]
=
np
.
tile
(
imCum
[:,
cols
-
1
],
[
r
,
1
]).
T
-
imCum
[:,
cols
-
2
*
r
-
1
:
cols
-
r
-
1
]
return
imDst
def
guidedfilter
(
img
,
p
,
r
,
eps
):
(
rows
,
cols
)
=
img
.
shape
N
=
boxfilter
(
np
.
ones
([
rows
,
cols
]),
r
)
meanI
=
boxfilter
(
img
,
r
)
/
N
meanP
=
boxfilter
(
p
,
r
)
/
N
meanIp
=
boxfilter
(
img
*
p
,
r
)
/
N
covIp
=
meanIp
-
meanI
*
meanP
meanII
=
boxfilter
(
img
*
img
,
r
)
/
N
varI
=
meanII
-
meanI
*
meanI
a
=
covIp
/
(
varI
+
eps
)
b
=
meanP
-
a
*
meanI
meanA
=
boxfilter
(
a
,
r
)
/
N
meanB
=
boxfilter
(
b
,
r
)
/
N
q
=
meanA
*
img
+
meanB
return
q
编辑
预览
Markdown
is supported
0%
请重试
或
添加新附件
.
添加附件
取消
You are about to add
0
people
to the discussion. Proceed with caution.
先完成此消息的编辑!
取消
想要评论请
注册
或
登录










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}