Skip to content
体验新版
项目
组织
正在加载...
登录
切换导航
打开侧边栏
PaddlePaddle
PaddleHub
提交
c7421e64
P
PaddleHub
项目概览
PaddlePaddle
/
PaddleHub
大约 2 年 前同步成功
通知
285
Star
12117
Fork
2091
代码
文件
提交
分支
Tags
贡献者
分支图
Diff
Issue
200
列表
看板
标记
里程碑
合并请求
4
Wiki
0
Wiki
分析
仓库
DevOps
项目成员
Pages
P
PaddleHub
项目概览
项目概览
详情
发布
仓库
仓库
文件
提交
分支
标签
贡献者
分支图
比较
Issue
200
Issue
200
列表
看板
标记
里程碑
合并请求
4
合并请求
4
Pages
分析
分析
仓库分析
DevOps
Wiki
0
Wiki
成员
成员
收起侧边栏
关闭侧边栏
动态
分支图
创建新Issue
提交
Issue看板
未验证
提交
c7421e64
编写于
11月 16, 2020
作者:
jm_12138
提交者:
GitHub
11月 16, 2020
浏览文件
操作
浏览文件
下载
电子邮件补丁
差异文件
Add a hand_pose_localization module
上级
25a9268c
变更
4
隐藏空白更改
内联
并排
Showing
4 changed file
with
365 addition
and
0 deletion
+365
-0
hub_module/modules/image/keypoint_detection/hand_pose_localization/README.md
...image/keypoint_detection/hand_pose_localization/README.md
+112
-0
hub_module/modules/image/keypoint_detection/hand_pose_localization/model.py
.../image/keypoint_detection/hand_pose_localization/model.py
+70
-0
hub_module/modules/image/keypoint_detection/hand_pose_localization/module.py
...image/keypoint_detection/hand_pose_localization/module.py
+56
-0
hub_module/modules/image/keypoint_detection/hand_pose_localization/processor.py
...ge/keypoint_detection/hand_pose_localization/processor.py
+127
-0
未找到文件。
hub_module/modules/image/keypoint_detection/hand_pose_localization/README.md
0 → 100644
浏览文件 @
c7421e64
## 模型概述
openpose 手部关键点检测模型
模型详情请参考
[
openpose开源项目
](
https://github.com/CMU-Perceptual-Computing-Lab/openpose
)
## 模型安装
```
shell
$hub
install
hand_pose_localization
```
## API 说明
```
python
def
keypoint_detection
(
self
,
images
=
None
,
paths
=
None
,
batch_size
=
1
,
output_dir
=
'output'
,
visualization
=
False
)
```
预测API,识别出人体手部关键点。
**参数**
*
images (list
\[
numpy.ndarray
\]
): 图片数据,ndarray.shape 为
\[
H, W, C
\]
, 默认设为 None;
*
paths (list
\[
str
\]
): 图片的路径, 默认设为 None;
*
batch
\_
size (int): batch 的大小,默认设为 1;
*
visualization (bool): 是否将识别结果保存为图片文件,默认设为 False;
*
output
\_
dir (str): 图片的保存路径,默认设为 output。
**返回**
*
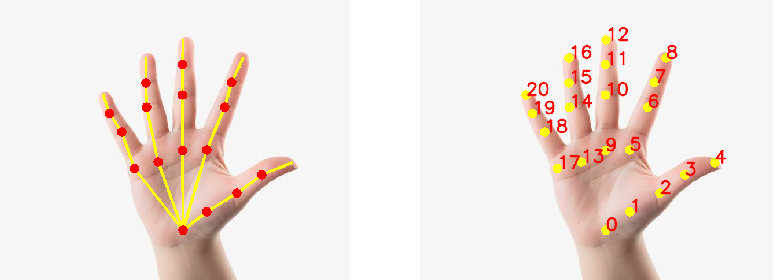
res (list[list[list[int]]]): 每张图片识别到的21个手部关键点组成的列表,每个关键点的格式为[x, y],若有关键点未识别到则为None
## 预测代码示例
```
python
import
cv2
import
paddlehub
as
hub
# use_gpu:是否使用GPU进行预测
model
=
hub
.
Module
(
'hand_pose_localization'
,
use_gpu
=
False
)
# 调用关键点检测API
result
=
model
.
keypoint_detection
(
images
=
[
cv2
.
imread
(
'/PATH/TO/IMAGE'
)])
# or
# result = model.keypoint_detection(paths=['/PATH/TO/IMAGE'])
# 打印预测结果
print
(
result
)
```
## 服务部署
PaddleHub Serving可以部署一个在线人体手部关键点检测服务。
## 第一步:启动PaddleHub Serving
运行启动命令:
```
shell
$
hub serving start
-m
hand_pose_localization
```
这样就完成了一个人体手部关键点检测的在线服务API的部署,默认端口号为8866。
**NOTE:**
如使用GPU预测,则需要在启动服务之前,请设置CUDA
\_
VISIBLE
\_
DEVICES环境变量,否则不用设置。
## 第二步:发送预测请求
配置好服务端,以下数行代码即可实现发送预测请求,获取预测结果
```
python
import
requests
import
json
import
cv2
import
base64
# 图片Base64编码函数
def
cv2_to_base64
(
image
):
data
=
cv2
.
imencode
(
'.jpg'
,
image
)[
1
]
return
base64
.
b64encode
(
data
.
tostring
()).
decode
(
'utf8'
)
# 发送HTTP请求
data
=
{
'images'
:[
cv2_to_base64
(
cv2
.
imread
(
"/PATH/TO/IMAGE"
))]}
headers
=
{
"Content-type"
:
"application/json"
}
url
=
"http://127.0.0.1:8866/predict/hand_pose_localization"
r
=
requests
.
post
(
url
=
url
,
headers
=
headers
,
data
=
json
.
dumps
(
data
))
# 打印预测结果
print
(
r
.
json
()[
"results"
])
```
## 模型相关信息
### 模型代码
https://github.com/CMU-Perceptual-Computing-Lab/openpose
### 依赖
paddlepaddle >= 1.8.0
paddlehub >= 1.8.0
hub_module/modules/image/keypoint_detection/hand_pose_localization/model.py
0 → 100644
浏览文件 @
c7421e64
import
os
import
numpy
as
np
from
paddle.fluid.core
import
AnalysisConfig
,
create_paddle_predictor
__all__
=
[
'Model'
]
class
Model
():
# 初始化函数
def
__init__
(
self
,
modelpath
,
use_gpu
):
# 加载模型预测器
self
.
predictor
=
self
.
load_model
(
modelpath
,
use_gpu
)
# 获取模型的输入输出
self
.
input_names
=
self
.
predictor
.
get_input_names
()
self
.
output_names
=
self
.
predictor
.
get_output_names
()
self
.
input_tensor
=
self
.
predictor
.
get_input_tensor
(
self
.
input_names
[
0
])
self
.
output_tensor
=
self
.
predictor
.
get_output_tensor
(
self
.
output_names
[
0
])
# 模型加载函数
def
load_model
(
self
,
modelpath
,
use_gpu
):
# 对运行位置进行配置
if
use_gpu
:
try
:
places
=
os
.
environ
[
"CUDA_VISIBLE_DEVICES"
]
places
=
int
(
places
[
0
])
except
Exception
as
e
:
print
(
'Error: %s. Please set the environment variables "CUDA_VISIBLE_DEVICES".'
%
e
)
use_gpu
=
False
# 预训练模型路径
model
=
os
.
path
.
join
(
modelpath
,
"__model__"
)
params
=
os
.
path
.
join
(
modelpath
,
"__params__"
)
# 加载模型参数
config
=
AnalysisConfig
(
model
,
params
)
# 设置参数
if
use_gpu
:
config
.
enable_use_gpu
(
100
,
places
)
else
:
config
.
disable_gpu
()
config
.
enable_mkldnn
()
config
.
disable_glog_info
()
config
.
switch_ir_optim
(
True
)
config
.
switch_use_feed_fetch_ops
(
False
)
config
.
switch_specify_input_names
(
True
)
# 通过参数加载模型预测器
predictor
=
create_paddle_predictor
(
config
)
# 返回预测器
return
predictor
# 模型预测函数
def
predict
(
self
,
input_datas
):
outputs
=
[]
# 遍历输入数据进行预测
for
input_data
in
input_datas
:
self
.
input_tensor
.
copy_from_cpu
(
input_data
)
self
.
predictor
.
zero_copy_run
()
output
=
self
.
output_tensor
.
copy_to_cpu
()
outputs
.
append
(
output
)
# 预测结果合并
outputs
=
np
.
concatenate
(
outputs
,
0
)
# 返回预测结果
return
outputs
\ No newline at end of file
hub_module/modules/image/keypoint_detection/hand_pose_localization/module.py
0 → 100644
浏览文件 @
c7421e64
# coding=utf-8
import
os
from
paddlehub
import
Module
from
paddlehub.module.module
import
moduleinfo
,
serving
from
hand_pose_localization.model
import
Model
from
hand_pose_localization.processor
import
base64_to_cv2
,
Processor
@
moduleinfo
(
name
=
"hand_pose_localization"
,
# 模型名称
type
=
"CV/keypoint_detection"
,
# 模型类型
author
=
"jm12138"
,
# 作者名称
author_email
=
"jm12138@qq.com"
,
# 作者邮箱
summary
=
"hand_pose_localization"
,
# 模型介绍
version
=
"1.0.0"
# 版本号
)
class
Hand_Pose_Localization
(
Module
):
# 初始化函数
def
_initialize
(
self
,
use_gpu
=
False
):
# 设置模型路径
self
.
model_path
=
os
.
path
.
join
(
self
.
directory
,
"hand_pose_localization"
)
# 加载模型
self
.
model
=
Model
(
self
.
model_path
,
use_gpu
)
# 关键点检测函数
def
keypoint_detection
(
self
,
images
=
None
,
paths
=
None
,
batch_size
=
1
,
output_dir
=
'output'
,
visualization
=
False
):
# 加载数据处理器
processor
=
Processor
(
images
,
paths
,
batch_size
,
output_dir
)
# 模型预测
outputs
=
self
.
model
.
predict
(
processor
.
input_datas
)
# 结果后处理
results
=
processor
.
postprocess
(
outputs
,
visualization
)
# 返回结果
return
results
# Hub Serving
@
serving
def
serving_method
(
self
,
images
,
**
kwargs
):
# 获取输入数据
images_decode
=
[
base64_to_cv2
(
image
)
for
image
in
images
]
# 关键点检测
results
=
self
.
keypoint_detection
(
images_decode
,
**
kwargs
)
# 返回结果
return
results
\ No newline at end of file
hub_module/modules/image/keypoint_detection/hand_pose_localization/processor.py
0 → 100644
浏览文件 @
c7421e64
import
os
import
cv2
import
time
import
base64
import
numpy
as
np
__all__
=
[
'base64_to_cv2'
,
'Processor'
]
def
check_dir
(
dir_path
):
# 目录检查函数
if
not
os
.
path
.
exists
(
dir_path
):
os
.
makedirs
(
dir_path
)
elif
os
.
path
.
isfile
(
dir_path
):
os
.
remove
(
dir_path
)
os
.
makedirs
(
dir_path
)
def
base64_to_cv2
(
b64str
):
# base64转cv2函数
data
=
base64
.
b64decode
(
b64str
.
encode
(
'utf8'
))
data
=
np
.
fromstring
(
data
,
np
.
uint8
)
data
=
cv2
.
imdecode
(
data
,
cv2
.
IMREAD_COLOR
)
return
data
class
Processor
():
# 初始化函数
def
__init__
(
self
,
images
=
None
,
paths
=
None
,
batch_size
=
1
,
output_dir
=
'output'
):
# 变量设置
self
.
num_points
=
21
self
.
inHeight
=
368
self
.
threshold
=
0.1
self
.
point_pairs
=
[[
0
,
1
],[
1
,
2
],[
2
,
3
],[
3
,
4
],
[
0
,
5
],[
5
,
6
],[
6
,
7
],[
7
,
8
],
[
0
,
9
],[
9
,
10
],[
10
,
11
],[
11
,
12
],
[
0
,
13
],[
13
,
14
],[
14
,
15
],[
15
,
16
],
[
0
,
17
],[
17
,
18
],[
18
,
19
],[
19
,
20
]]
self
.
images
=
images
self
.
paths
=
paths
self
.
batch_size
=
batch_size
self
.
output_dir
=
output_dir
# 获取原始输入数据
self
.
datas
=
self
.
load_datas
()
# 对原始输入数据进行预处理
self
.
input_datas
=
self
.
preprocess
()
# 读取数据函数
def
load_datas
(
self
):
datas
=
[]
# 读取数据列表
if
self
.
paths
is
not
None
:
for
im_path
in
self
.
paths
:
assert
os
.
path
.
isfile
(
im_path
),
"The {} isn't a valid file path."
.
format
(
im_path
)
im
=
cv2
.
imread
(
im_path
).
astype
(
'float32'
)
datas
.
append
(
im
)
if
self
.
images
is
not
None
:
datas
=
self
.
images
# 返回数据列表
return
datas
# 数据预处理函数
def
preprocess
(
self
):
input_datas
=
[]
# 数据预处理
for
i
,
img
in
enumerate
(
self
.
datas
):
img_height
,
img_width
,
_
=
img
.
shape
aspect_ratio
=
img_width
/
img_height
inWidth
=
int
(((
aspect_ratio
*
self
.
inHeight
)
*
8
)
//
8
)
inpBlob
=
cv2
.
dnn
.
blobFromImage
(
img
,
1.0
/
255
,
(
inWidth
,
self
.
inHeight
),
(
0
,
0
,
0
),
swapRB
=
False
,
crop
=
False
)
input_datas
.
append
(
inpBlob
)
# 数据按batch_size切分
input_datas
=
np
.
concatenate
(
input_datas
,
0
)
split_num
=
len
(
self
.
datas
)
//
self
.
batch_size
+
1
if
len
(
self
.
datas
)
%
self
.
batch_size
!=
0
else
len
(
self
.
datas
)
//
self
.
batch_size
input_datas
=
np
.
array_split
(
input_datas
,
split_num
)
# 返回预处理完成的数据
return
input_datas
# 结果后处理函数
def
postprocess
(
self
,
outputs
,
visualization
):
all_points
=
[]
# 结果后处理
for
im_id
,
img
in
enumerate
(
self
.
datas
):
points
=
[]
for
idx
in
range
(
self
.
num_points
):
probMap
=
outputs
[
im_id
,
idx
,
:,
:]
img_height
,
img_width
,
_
=
img
.
shape
probMap
=
cv2
.
resize
(
probMap
,
(
img_width
,
img_height
))
minVal
,
prob
,
minLoc
,
point
=
cv2
.
minMaxLoc
(
probMap
)
if
prob
>
self
.
threshold
:
points
.
append
([
int
(
point
[
0
]),
int
(
point
[
1
])])
else
:
points
.
append
(
None
)
all_points
.
append
(
points
)
# 结果可视化
if
visualization
:
# 检查输出目录
check_dir
(
self
.
output_dir
)
# 结果可视化
self
.
vis_pose
(
img
,
points
,
im_id
)
# 返回后处理结果
return
all_points
# 结果可视化
def
vis_pose
(
self
,
img
,
points
,
im_id
):
# 根据结果绘制关键点到原图像上
for
pair
in
self
.
point_pairs
:
partA
=
pair
[
0
]
partB
=
pair
[
1
]
if
points
[
partA
]
and
points
[
partB
]:
cv2
.
line
(
img
,
tuple
(
points
[
partA
]),
tuple
(
points
[
partB
]),
(
0
,
255
,
255
),
3
)
cv2
.
circle
(
img
,
tuple
(
points
[
partA
]),
8
,
(
0
,
0
,
255
),
thickness
=-
1
,
lineType
=
cv2
.
FILLED
)
# 可视化图像保存
cv2
.
imwrite
(
os
.
path
.
join
(
self
.
output_dir
,
'%d_%d.jpg'
%
(
im_id
,
time
.
time
())),
img
)
编辑
预览
Markdown
is supported
0%
请重试
或
添加新附件
.
添加附件
取消
You are about to add
0
people
to the discussion. Proceed with caution.
先完成此消息的编辑!
取消
想要评论请
注册
或
登录
