[feature] add rcan model for remote sensing image super-resolution (#610)
* [feature] add rcan model for super-resolution
Showing
configs/rcan_rssr_x4.yaml
0 → 100644
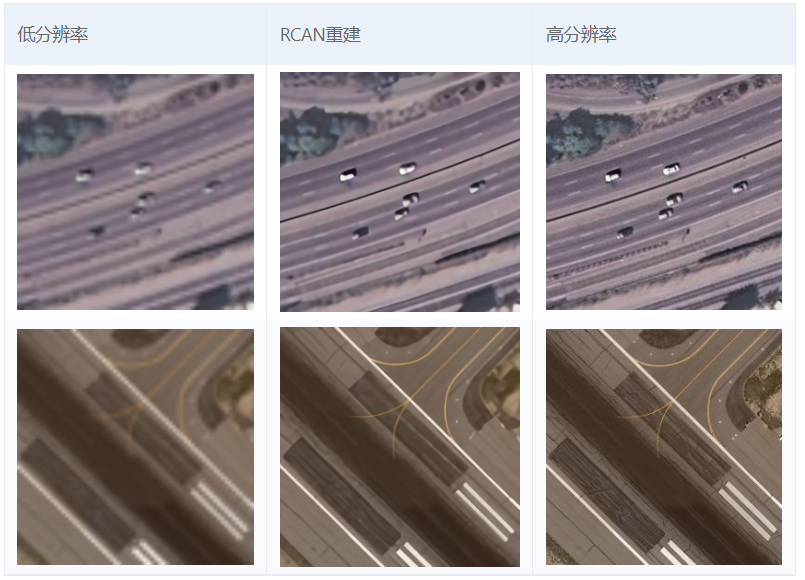
docs/imgs/RSSR.png
0 → 100644
{kind=link}
435.0 KB
ppgan/models/generators/rcan.py
0 → 100644
ppgan/models/rcan_model.py
0 → 100644