[Cherry pick] update readme (#4410)
* chang image
Showing
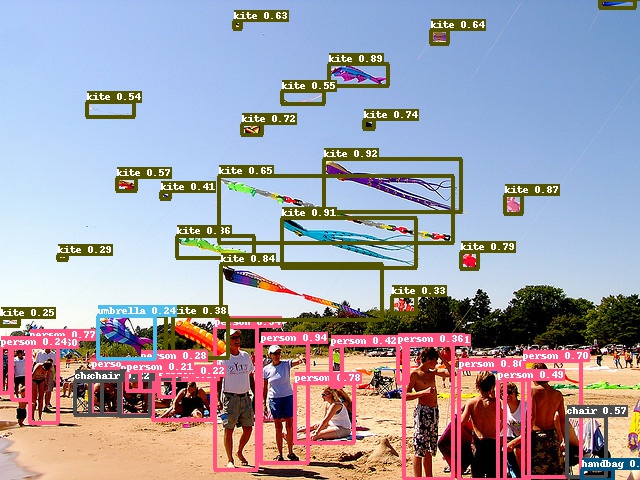
docs/images/det.jpg
已删除
100644 → 0
{kind=link}
161.0 KB
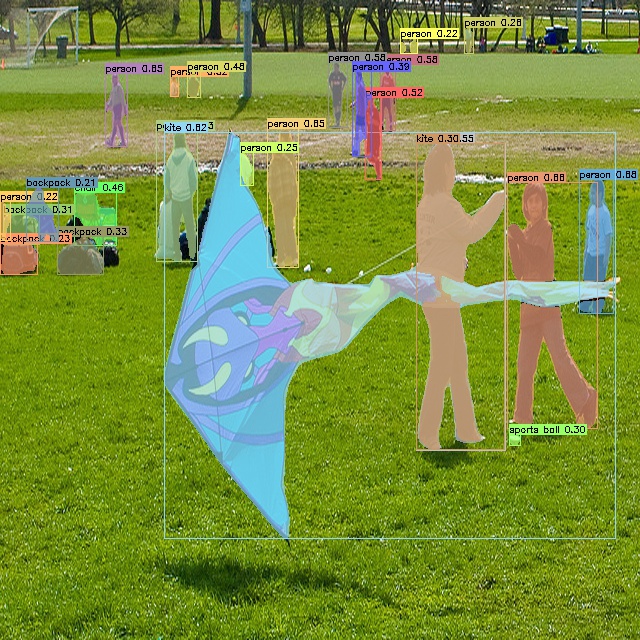
docs/images/ins.jpg
已删除
100644 → 0
{kind=link}
260.1 KB
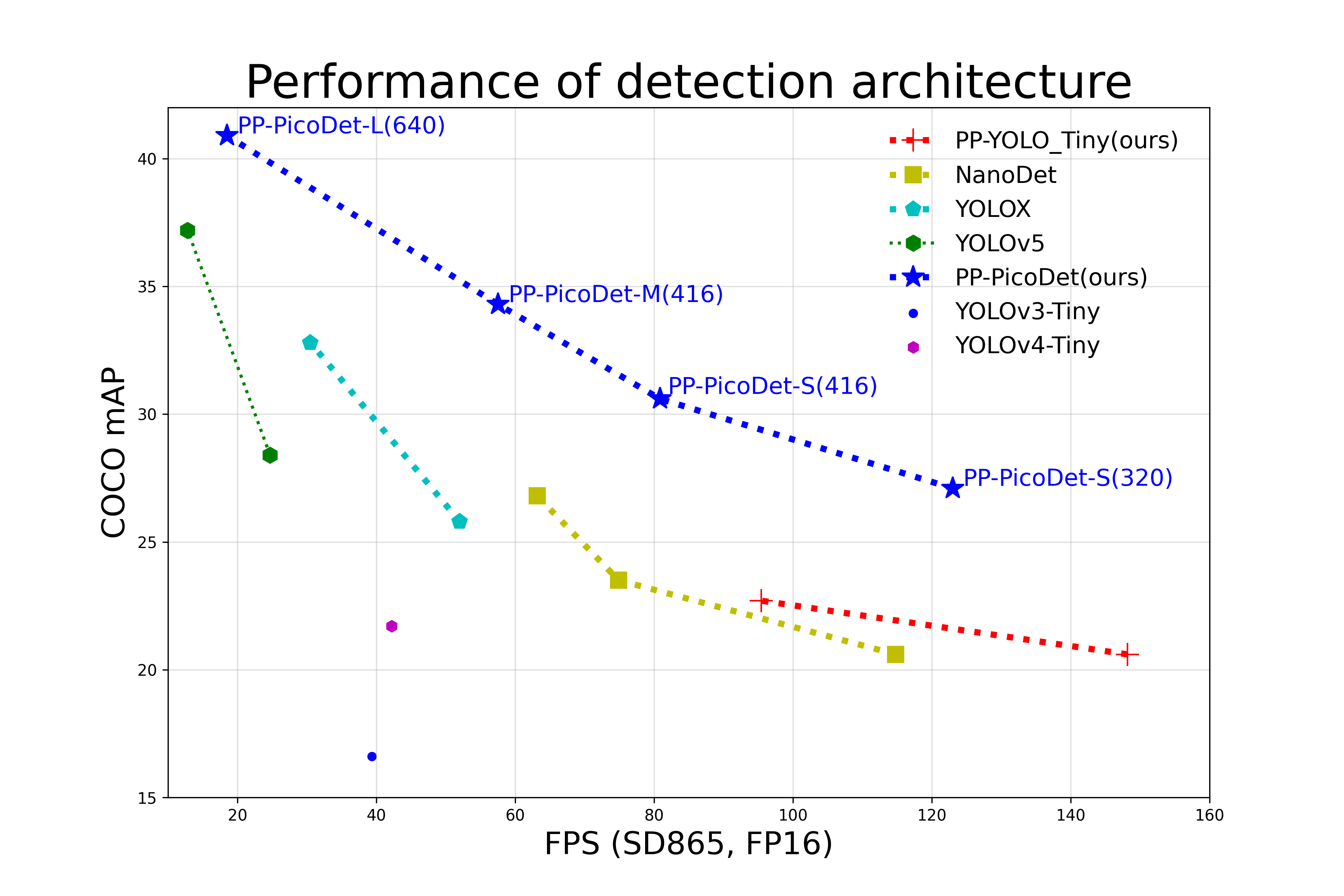
docs/images/mobile_fps_map.png
0 → 100644
{kind=link}
311.8 KB
docs/images/pose.gif
已删除
100644 → 0
{kind=link}

4.9 MB
{kind=link}
{kind=link}
因为 它太大了无法显示 image diff 。你可以改为 查看blob。