merge
Showing
README_cn.md
0 → 100644
README_en.md
已删除
100644 → 0
configs/ppyolo/README.md
0 → 100644
configs/ppyolo/README_cn.md
0 → 100644
configs/ppyolo/ppyolo.yml
0 → 100644
configs/ppyolo/ppyolo_2x.yml
0 → 100644
configs/ppyolo/ppyolo_reader.yml
0 → 100644
configs/ppyolo/ppyolo_test.yml
0 → 100644
configs/ppyolo/ppyolo_tiny.yml
0 → 100755
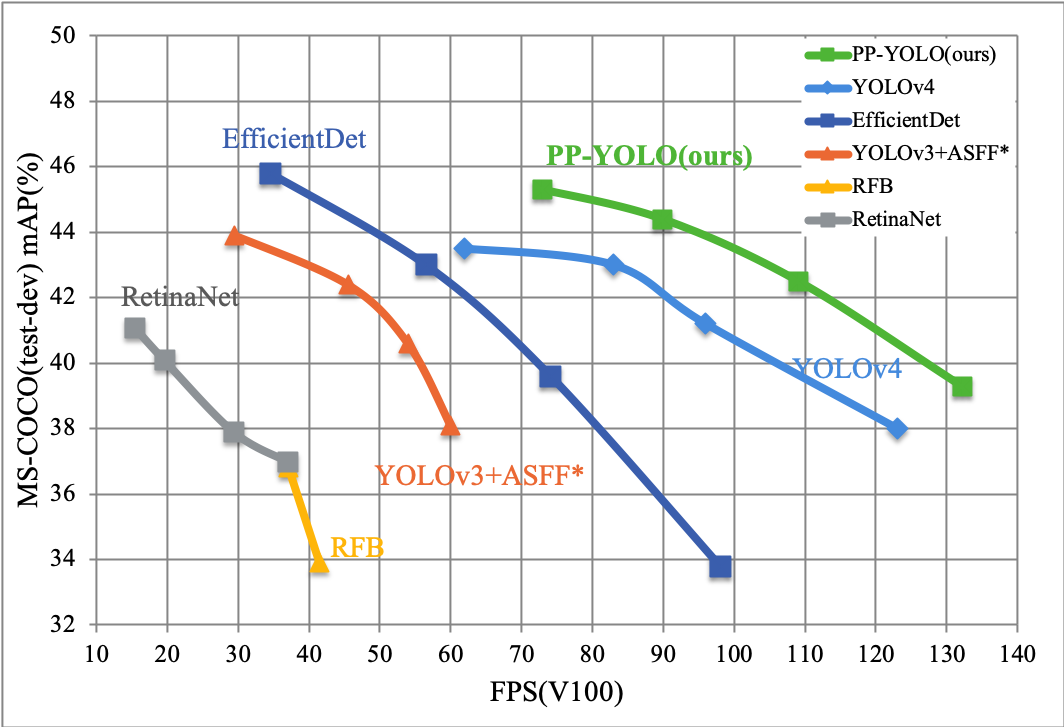
docs/images/ppyolo_map_fps.png
0 → 100644
{kind=link}
131.9 KB