Remove CN comments in roadsign config. (#1791)
* Update QUICK_STARTED_cn.md (#1757) fix typo * cherry-pick #1757 and #1473, test=document_fix
Showing
{kind=link}
273.6 KB
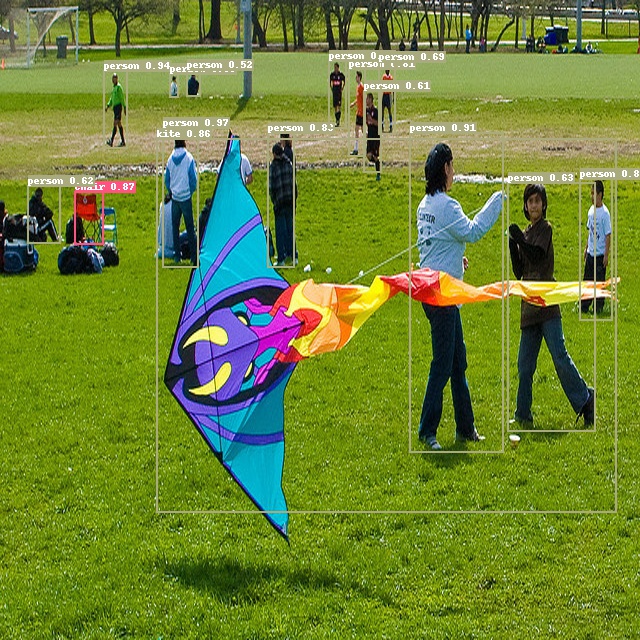
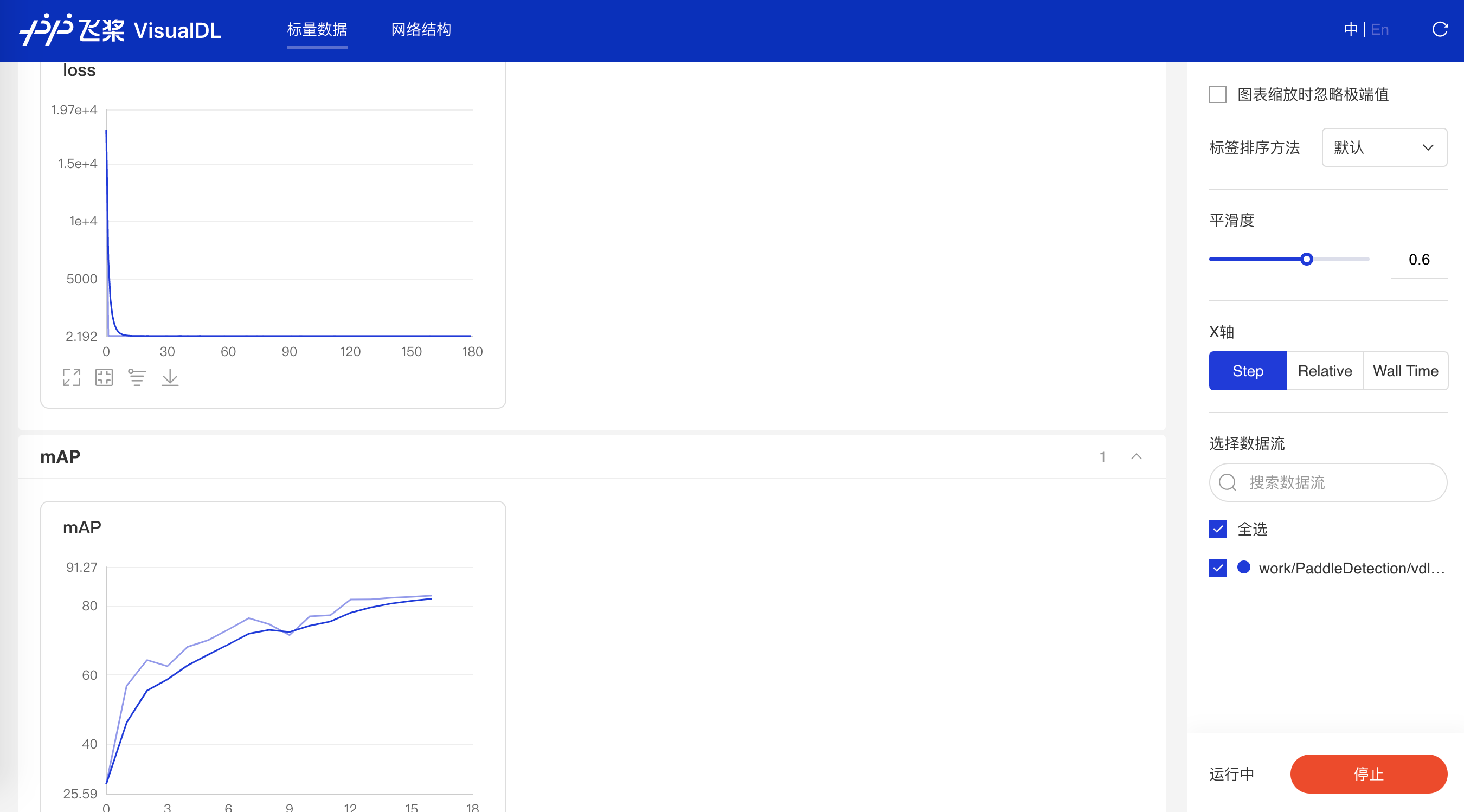
docs/images/visualdl_roadsign.png
0 → 100644
{kind=link}
216.8 KB
* Update QUICK_STARTED_cn.md (#1757) fix typo * cherry-pick #1757 and #1473, test=document_fix
273.6 KB
216.8 KB