Skip to content
体验新版
项目
组织
正在加载...
登录
切换导航
打开侧边栏
PaddlePaddle
PaddleClas
提交
abfced46
P
PaddleClas
项目概览
PaddlePaddle
/
PaddleClas
大约 2 年 前同步成功
通知
118
Star
4999
Fork
1114
代码
文件
提交
分支
Tags
贡献者
分支图
Diff
Issue
19
列表
看板
标记
里程碑
合并请求
6
Wiki
0
Wiki
分析
仓库
DevOps
项目成员
Pages
P
PaddleClas
项目概览
项目概览
详情
发布
仓库
仓库
文件
提交
分支
标签
贡献者
分支图
比较
Issue
19
Issue
19
列表
看板
标记
里程碑
合并请求
6
合并请求
6
Pages
分析
分析
仓库分析
DevOps
Wiki
0
Wiki
成员
成员
收起侧边栏
关闭侧边栏
动态
分支图
创建新Issue
提交
Issue看板
提交
abfced46
编写于
6月 08, 2022
作者:
D
dongshuilong
浏览文件
操作
浏览文件
下载
电子邮件补丁
差异文件
update mainbody and vector search doc
上级
6fcca493
变更
3
隐藏空白更改
内联
并排
Showing
3 changed file
with
82 addition
and
42 deletion
+82
-42
docs/images/algorithm_introduction/hnsw.png
docs/images/algorithm_introduction/hnsw.png
+0
-0
docs/zh_CN/image_recognition_pipeline/mainbody_detection.md
docs/zh_CN/image_recognition_pipeline/mainbody_detection.md
+26
-14
docs/zh_CN/image_recognition_pipeline/vector_search.md
docs/zh_CN/image_recognition_pipeline/vector_search.md
+56
-28
未找到文件。
docs/images/algorithm_introduction/hnsw.png
0 → 100644
浏览文件 @
abfced46
72.5 KB
docs/zh_CN/image_recognition_pipeline/mainbody_detection.md
浏览文件 @
abfced46
...
@@ -19,9 +19,13 @@
...
@@ -19,9 +19,13 @@
-
[
3.3 配置文件改动和说明
](
#3.3
)
-
[
3.3 配置文件改动和说明
](
#3.3
)
-
[
3.4 启动训练
](
#3.4
)
-
[
3.4 启动训练
](
#3.4
)
-
[
3.5 模型预测与调试
](
#3.5
)
-
[
3.5 模型预测与调试
](
#3.5
)
-
[
3.6 模型导出与预测部署
](
#3.6
)
-
[
4. 模型推理部署
](
#4
)
-
[
4.1 推理模型准备
](
#4.1
)
-
[
4.2 基于python预测引擎推理
](
#4.2
)
-
[
4.3 其他推理方式
](
#4.3
)
<a
name=
"1"
></a>
<a
name=
"1"
></a>
## 1. 数据集
## 1. 数据集
...
@@ -37,7 +41,7 @@
...
@@ -37,7 +41,7 @@
在实际训练的过程中,将所有数据集混合在一起。由于是主体检测,这里将所有标注出的检测框对应的类别都修改为
`前景`
的类别,最终融合的数据集中只包含 1 个类别,即前景。
在实际训练的过程中,将所有数据集混合在一起。由于是主体检测,这里将所有标注出的检测框对应的类别都修改为
`前景`
的类别,最终融合的数据集中只包含 1 个类别,即前景。
<a
name=
"2"
></a>
<a
name=
"2"
></a>
## 2. 模型选择
## 2. 模型选择
...
@@ -55,7 +59,7 @@
...
@@ -55,7 +59,7 @@
*
速度评测机器的 CPU 具体信息为:
`Intel(R) Xeon(R) Gold 6148 CPU @ 2.40GHz`
,速度指标为开启 mkldnn,线程数设置为 10 测试得到。
*
速度评测机器的 CPU 具体信息为:
`Intel(R) Xeon(R) Gold 6148 CPU @ 2.40GHz`
,速度指标为开启 mkldnn,线程数设置为 10 测试得到。
*
主体检测的预处理过程较为耗时,平均每张图在上述机器上的时间在 40~55 ms 左右,没有包含在上述的预测耗时统计中。
*
主体检测的预处理过程较为耗时,平均每张图在上述机器上的时间在 40~55 ms 左右,没有包含在上述的预测耗时统计中。
<a
name=
"2.1"
></a>
<a
name=
"2.1"
></a>
### 2.1 轻量级主体检测模型
### 2.1 轻量级主体检测模型
...
@@ -72,7 +76,7 @@ PicoDet 由 [PaddleDetection](https://github.com/PaddlePaddle/PaddleDetection)
...
@@ -72,7 +76,7 @@ PicoDet 由 [PaddleDetection](https://github.com/PaddlePaddle/PaddleDetection)
在轻量级主体检测任务中,为了更好地兼顾检测速度与效果,我们使用 PPLCNet_x2_5 作为主体检测模型的骨干网络,同时将训练与预测的图像尺度修改为了 640x640,其余配置与
[
picodet_lcnet_1_5x_416_coco.yml
](
https://github.com/PaddlePaddle/PaddleDetection/blob/develop/configs/picodet/more_config/picodet_lcnet_1_5x_416_coco.yml
)
完全一致。将数据集更换为自定义的主体检测数据集,进行训练,最终得到检测模型。
在轻量级主体检测任务中,为了更好地兼顾检测速度与效果,我们使用 PPLCNet_x2_5 作为主体检测模型的骨干网络,同时将训练与预测的图像尺度修改为了 640x640,其余配置与
[
picodet_lcnet_1_5x_416_coco.yml
](
https://github.com/PaddlePaddle/PaddleDetection/blob/develop/configs/picodet/more_config/picodet_lcnet_1_5x_416_coco.yml
)
完全一致。将数据集更换为自定义的主体检测数据集,进行训练,最终得到检测模型。
<a
name=
"2.2"
></a>
<a
name=
"2.2"
></a>
### 2.2 服务端主体检测模型
### 2.2 服务端主体检测模型
...
@@ -93,13 +97,13 @@ PP-YOLO 由 [PaddleDetection](https://github.com/PaddlePaddle/PaddleDetection)
...
@@ -93,13 +97,13 @@ PP-YOLO 由 [PaddleDetection](https://github.com/PaddlePaddle/PaddleDetection)
在服务端主体检测任务中,为了保证检测效果,我们使用 ResNet50vd-DCN 作为检测模型的骨干网络,使用配置文件
[
ppyolov2_r50vd_dcn_365e_coco.yml
](
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.1/configs/ppyolo/ppyolov2_r50vd_dcn_365e_coco.yml
)
,更换为自定义的主体检测数据集,进行训练,最终得到检测模型。
在服务端主体检测任务中,为了保证检测效果,我们使用 ResNet50vd-DCN 作为检测模型的骨干网络,使用配置文件
[
ppyolov2_r50vd_dcn_365e_coco.yml
](
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.1/configs/ppyolo/ppyolov2_r50vd_dcn_365e_coco.yml
)
,更换为自定义的主体检测数据集,进行训练,最终得到检测模型。
<a
name=
"3"
></a>
<a
name=
"3"
></a>
## 3. 模型训练
## 3. 模型训练
本节主要介绍怎样基于 PaddleDetection,基于自己的数据集,训练主体检测模型。
本节主要介绍怎样基于 PaddleDetection,基于自己的数据集,训练主体检测模型。
<a
name=
"3.1"
></a>
<a
name=
"3.1"
></a>
### 3.1 环境准备
### 3.1 环境准备
...
@@ -116,7 +120,7 @@ pip install -r requirements.txt
...
@@ -116,7 +120,7 @@ pip install -r requirements.txt
更多安装教程,请参考:
[
安装文档
](
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.1/docs/tutorials/INSTALL_cn.md
)
更多安装教程,请参考:
[
安装文档
](
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.1/docs/tutorials/INSTALL_cn.md
)
<a
name=
"3.2"
></a>
<a
name=
"3.2"
></a>
### 3.2 数据准备
### 3.2 数据准备
...
@@ -128,7 +132,7 @@ pip install -r requirements.txt
...
@@ -128,7 +132,7 @@ pip install -r requirements.txt
[{
u'id':
1
,
u'name':
u'foreground'
,
u'supercategory':
u'foreground'
}]
[{
u'id':
1
,
u'name':
u'foreground'
,
u'supercategory':
u'foreground'
}]
```
```
<a
name=
"3.3"
></a>
<a
name=
"3.3"
></a>
### 3.3 配置文件改动和说明
### 3.3 配置文件改动和说明
...
@@ -154,7 +158,7 @@ ppyolov2_reader.yml:主要说明数据读取器配置,如 batch size,并
...
@@ -154,7 +158,7 @@ ppyolov2_reader.yml:主要说明数据读取器配置,如 batch size,并
此外,也可以根据实际情况,修改上述文件,比如,如果显存溢出,可以将 batch size 和学习率等比缩小等。
此外,也可以根据实际情况,修改上述文件,比如,如果显存溢出,可以将 batch size 和学习率等比缩小等。
<a
name=
"3.4"
></a>
<a
name=
"3.4"
></a>
### 3.4 启动训练
### 3.4 启动训练
...
@@ -198,7 +202,7 @@ python -m paddle.distributed.launch --gpus 0,1,2,3 tools/train.py -c configs/ppy
...
@@ -198,7 +202,7 @@ python -m paddle.distributed.launch --gpus 0,1,2,3 tools/train.py -c configs/ppy
注意:如果遇到 "
`Out of memory error`
" 问题, 尝试在
`ppyolov2_reader.yml`
文件中调小
`batch_size`
,同时等比例调小学习率。
注意:如果遇到 "
`Out of memory error`
" 问题, 尝试在
`ppyolov2_reader.yml`
文件中调小
`batch_size`
,同时等比例调小学习率。
<a
name=
"3.5"
></a>
<a
name=
"3.5"
></a>
### 3.5 模型预测与调试
### 3.5 模型预测与调试
...
@@ -211,9 +215,11 @@ python tools/infer.py -c configs/ppyolo/ppyolov2_r50vd_dcn_365e_coco.yml --infer
...
@@ -211,9 +215,11 @@ python tools/infer.py -c configs/ppyolo/ppyolov2_r50vd_dcn_365e_coco.yml --infer
`--draw_threshold`
是个可选参数. 根据
[
NMS
](
https://ieeexplore.ieee.org/document/1699659
)
的计算,不同阈值会产生不同的结果
`keep_top_k`
表示设置输出目标的最大数量,默认值为 100,用户可以根据自己的实际情况进行设定。
`--draw_threshold`
是个可选参数. 根据
[
NMS
](
https://ieeexplore.ieee.org/document/1699659
)
的计算,不同阈值会产生不同的结果
`keep_top_k`
表示设置输出目标的最大数量,默认值为 100,用户可以根据自己的实际情况进行设定。
<a
name=
"3.6"
></a>
<a
name=
"4"
></a>
## 4. 模型推理部署
### 3.6 模型导出与预测部署。
<a
name=
"4.1"
></a>
### 4.1 推理模型准备
执行导出模型脚本:
执行导出模型脚本:
...
@@ -225,15 +231,21 @@ python tools/export_model.py -c configs/ppyolo/ppyolov2_r50vd_dcn_365e_coco.yml
...
@@ -225,15 +231,21 @@ python tools/export_model.py -c configs/ppyolo/ppyolov2_r50vd_dcn_365e_coco.yml
注意:
`PaddleDetection`
导出的 inference 模型的文件格式为
`model.xxx`
,这里如果希望与 PaddleClas 的 inference 模型文件格式保持一致,需要将其
`model.xxx`
文件修改为
`inference.xxx`
文件,用于后续主体检测的预测部署。
注意:
`PaddleDetection`
导出的 inference 模型的文件格式为
`model.xxx`
,这里如果希望与 PaddleClas 的 inference 模型文件格式保持一致,需要将其
`model.xxx`
文件修改为
`inference.xxx`
文件,用于后续主体检测的预测部署。
更多模型导出教程,请参考:
[
EXPORT_MODEL
](
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.
1
/deploy/EXPORT_MODEL.md
)
更多模型导出教程,请参考:
[
EXPORT_MODEL
](
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.
4
/deploy/EXPORT_MODEL.md
)
最终,目录
`inference/ppyolov2_r50vd_dcn_365e_coco`
中包含
`inference.pdiparams`
,
`inference.pdiparams.info`
以及
`inference.pdmodel`
文件,其中
`inference.pdiparams`
为保存的 inference 模型权重文件,
`inference.pdmodel`
为保存的 inference 模型结构文件。
最终,目录
`inference/ppyolov2_r50vd_dcn_365e_coco`
中包含
`inference.pdiparams`
,
`inference.pdiparams.info`
以及
`inference.pdmodel`
文件,其中
`inference.pdiparams`
为保存的 inference 模型权重文件,
`inference.pdmodel`
为保存的 inference 模型结构文件。
<a
name=
"4.2"
></a>
### 4.2 基于python预测引擎推理
导出模型之后,在主体检测与识别任务中,就可以将检测模型的路径更改为该 inference 模型路径,完成预测。
导出模型之后,在主体检测与识别任务中,就可以将检测模型的路径更改为该 inference 模型路径,完成预测。
以商品识别为例,其配置文件为
[
inference_product.yaml
](
../../../deploy/configs/inference_product.yaml
)
,修改其中的
`Global.det_inference_model_dir`
字段为导出的主体检测 inference 模型目录,参考
[
图像识别快速开始教程
](
../quick_start/quick_start_recognition.md
)
,即可完成商品检测与识别过程。
以商品识别为例,其配置文件为
[
inference_product.yaml
](
../../../deploy/configs/inference_product.yaml
)
,修改其中的
`Global.det_inference_model_dir`
字段为导出的主体检测 inference 模型目录,参考
[
图像识别快速开始教程
](
../quick_start/quick_start_recognition.md
)
,即可完成商品检测与识别过程。
<a
name=
"4.3"
></a>
### 4.3 其他推理方式
其他推理方法,如C++推理部署、PaddleServing部署等请参考
[
检测模型推理部署
](
https://github.com/PaddlePaddle/PaddleDetection/blob/release/2.4/deploy/README.md
)
。
### FAQ
### FAQ
...
...
docs/zh_CN/image_recognition_pipeline/vector_search.md
浏览文件 @
abfced46
# 向量检索
# 向量检索
## 目录
-
[
1. 向量检索应用场景介绍
](
#1
)
-
[
2. 向量检索算法介绍
](
#2
)
-
[
2.1 HNSW
](
#2.1
)
-
[
2.2 IVF
](
#2.2
)
-
[
2.3 FLAT
](
#2.3
)
-
[
3. 检索库安装
](
#3
)
-
[
4. 使用及配置文档介绍
](
#4
)
-
[
4.1 建库及配置文件参数
](
#4.1
)
-
[
4.2 检索配置文件参数
](
#4.2
)
<a
name=
"1"
></a>
## 1. 向量检索应用场景介绍
向量检索技术在图像识别、图像检索中应用比较广泛。其主要目标是,对于给定的查询向量,在已经建立好的向量库中,与库中所有的待查询向量,进行特征向量的相似度或距离计算,得到相似度排序。在图像识别系统中,我们使用
[
Faiss
](
https://github.com/facebookresearch/faiss
)
对此部分进行支持,具体信息请详查
[
Faiss 官网
](
https://github.com/facebookresearch/faiss
)
。
`Faiss`
主要有以下优势
向量检索技术在图像识别、图像检索中应用比较广泛。其主要目标是,对于给定的查询向量,在已经建立好的向量库中,与库中所有的待查询向量,进行特征向量的相似度或距离计算,得到相似度排序。在图像识别系统中,我们使用
[
Faiss
](
https://github.com/facebookresearch/faiss
)
对此部分进行支持,具体信息请详查
[
Faiss 官网
](
https://github.com/facebookresearch/faiss
)
。
`Faiss`
主要有以下优势
-
适配性好:支持 Windos、Linux、MacOS 系统
-
适配性好:支持 Windos、Linux、MacOS 系统
...
@@ -20,17 +36,33 @@
...
@@ -20,17 +36,33 @@
--------------------------
--------------------------
## 目录
<a
name=
"2"
></a>
## 2. 使用的检索算法
目前
`PaddleClas`
中检索模块,支持三种检索算法
**HNSW32**
、
**IVF**
、
**FLAT**
。每种检索算法,满足不同场景。其中
`HNSW32`
为默认方法,此方法的检索精度、检索速度可以取得一个较好的平衡,具体算法介绍可以查看
[
官方文档
](
https://github.com/facebookresearch/faiss/wiki
)
。
<a
name=
"2.1"
></a>
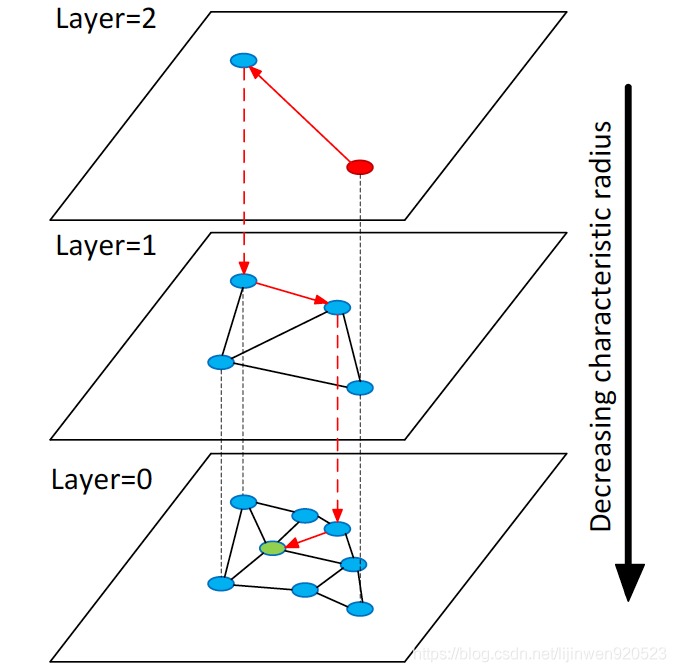
### 2.1 HNSW方法
此方法为图索引方法,如下图所示,在建立索引的时候,分为不同的层,所以检索精度较高,速度较快,但是特征库只支持添加图像功能,不支持删除图像特征功能。基于图的向量检索算法在向量检索的评测中性能都是比较优异的。如果比较在乎检索算法的效率,而且可以容忍一定的空间成本,多数场景下比较推荐基于图的检索算法。而HNSW是一种典型的,应用广泛的图算法,很多分布式检索引擎都对HNSW算法进行了分布式改造,以应用于高并发,大数据量的线上查询。此方法为默认方法。
<div
align=
"center"
>
<img
src=
"../../images/algorithm_introduction/hnsw.png"
width =
"400"
/>
</div>
<a
name=
"2.2"
></a>
### 2.2 IVF
-
[
1. 检索库安装
](
#1
)
一种倒排索引检索方法。速度较快,但是精度略低。特征库支持增加、删除图像特征功能。IVF主要利用倒排的思想保存每个聚类中心下的向量,每次查询向量的时候找到最近的几个中心,分别搜索这几个中心下的向量。通过减小搜索范围,大大提升搜索效率。
-
[
2. 使用的检索算法
](
#2
)
-
[
3. 使用及配置文档介绍
](
#3
)
-
[
3.1 建库及配置文件参数
](
#3.1
)
-
[
3.2 检索配置文件参数
](
#3.2
)
<a
name=
"1"
></a>
<a
name=
"2.3"
></a>
### 2.3 FLAT
## 1. 检索库安装
暴力检索算法。精度最高,但是数据量大时,检索速度较慢。特征库支持增加、删除图像特征功能。
<a
name=
"3"
></a>
## 3. 检索库安装
`Faiss`
具体安装方法如下:
`Faiss`
具体安装方法如下:
...
@@ -40,27 +72,16 @@ pip install faiss-cpu==1.7.1post2
...
@@ -40,27 +72,16 @@ pip install faiss-cpu==1.7.1post2
若使用时,不能正常引用,则
`uninstall`
之后,重新
`install`
,尤其是
`windows`
下。
若使用时,不能正常引用,则
`uninstall`
之后,重新
`install`
,尤其是
`windows`
下。
<a
name=
"2"
></a>
## 2. 使用的检索算法
目前
`PaddleClas`
中检索模块,支持如下三种检索算法
-
**HNSW32**
: 一种图索引方法。检索精度较高,速度较快。但是特征库只支持添加图像功能,不支持删除图像特征功能。(默认方法)
-
**IVF**
:倒排索引检索方法。速度较快,但是精度略低。特征库支持增加、删除图像特征功能。
-
**FLAT**
: 暴力检索算法。精度最高,但是数据量大时,检索速度较慢。特征库支持增加、删除图像特征功能。
每种检索算法,满足不同场景。其中
`HNSW32`
为默认方法,此方法的检索精度、检索速度可以取得一个较好的平衡,具体算法介绍可以查看
[
官方文档
](
https://github.com/facebookresearch/faiss/wiki
)
。
<a
name=
"
3"
></a>
<a
name=
"
4"
></a>
##
3
. 使用及配置文档介绍
##
4
. 使用及配置文档介绍
涉及检索模块配置文件位于:
`deploy/configs/`
下,其中
`
build_*.yaml`
是建立特征库的相关配置文件,
`inference_*.yaml`
是检索或者分类的推理
配置文件。
涉及检索模块配置文件位于:
`deploy/configs/`
下,其中
`
inference_*.yaml`
是检索或者分类的推理配置文件,同时也是建立特征库的相关
配置文件。
<a
name=
"
3.1"
></a>
<a
name=
"
4.1"
></a>
###
3
.1 建库及配置文件参数
###
4
.1 建库及配置文件参数
建库的具体操作如下:
建库的具体操作如下:
...
@@ -68,14 +89,14 @@ pip install faiss-cpu==1.7.1post2
...
@@ -68,14 +89,14 @@ pip install faiss-cpu==1.7.1post2
# 进入 deploy 目录
# 进入 deploy 目录
cd
deploy
cd
deploy
# yaml 文件根据需要改成自己所需的具体 yaml 文件
# yaml 文件根据需要改成自己所需的具体 yaml 文件
python python/build_gallery.py
-c
configs/
build
_
***
.yaml
python python/build_gallery.py
-c
configs/
inference
_
***
.yaml
```
```
其中
`yaml`
文件的建库的配置如下,在运行时,请根据实际情况进行修改。建库操作会将根据
`data_file`
的图像列表,将
`image_root`
下的图像进行特征提取,并在
`index_dir`
下进行存储,以待后续检索使用。
其中
`yaml`
文件的建库的配置如下,在运行时,请根据实际情况进行修改。建库操作会将根据
`data_file`
的图像列表,将
`image_root`
下的图像进行特征提取,并在
`index_dir`
下进行存储,以待后续检索使用。
其中
`data_file`
文件存储的是图像文件的路径和标签,每一行的格式为:
`image_path label`
。中间间隔以
`yaml`
文件中
`delimiter`
参数作为间隔。
其中
`data_file`
文件存储的是图像文件的路径和标签,每一行的格式为:
`image_path label`
。中间间隔以
`yaml`
文件中
`delimiter`
参数作为间隔。
关于特征提取的具体模型参数,可查看
`yaml`
文件。
关于特征提取的具体模型参数,可查看
`yaml`
文件。
注意下面的配置参数只列举了建立索引库相关部分。
```
yaml
```
yaml
# indexing engine config
# indexing engine config
...
@@ -88,6 +109,7 @@ IndexProcess:
...
@@ -88,6 +109,7 @@ IndexProcess:
delimiter
:
"
\t
"
delimiter
:
"
\t
"
dist_type
:
"
IP"
dist_type
:
"
IP"
embedding_size
:
512
embedding_size
:
512
batch_size
:
32
```
```
-
**index_method**
:使用的检索算法。目前支持三种,HNSW32、IVF、Flat
-
**index_method**
:使用的检索算法。目前支持三种,HNSW32、IVF、Flat
...
@@ -98,23 +120,29 @@ IndexProcess:
...
@@ -98,23 +120,29 @@ IndexProcess:
-
**delimiter**
:
**data_file**
中每一行的间隔符
-
**delimiter**
:
**data_file**
中每一行的间隔符
-
**dist_type**
: 特征匹配过程中使用的相似度计算方式。例如
`IP`
内积相似度计算方式,
`L2`
欧式距离计算方法
-
**dist_type**
: 特征匹配过程中使用的相似度计算方式。例如
`IP`
内积相似度计算方式,
`L2`
欧式距离计算方法
-
**embedding_size**
:特征维度
-
**embedding_size**
:特征维度
-
**batch_size**
:建立特征库时,特征提取的
`batch_size`
<a
name=
"3.2"
></a>
<a
name=
"4.2"
></a>
### 4.2 检索配置文件参数
### 3.2 检索配置文件参数
将检索的过程融合到
`PP-ShiTu`
的整体流程中,请参考
[
README
](
../../../README_ch.md
)
中
`PP-ShiTu 图像识别系统介绍`
部分。检索具体使用操作请参考
[
识别快速开始文档
](
../quick_start/quick_start_recognition.md
)
。
将检索的过程融合到
`PP-ShiTu`
的整体流程中,请参考
[
README
](
../../../README_ch.md
)
中
`PP-ShiTu 图像识别系统介绍`
部分。检索具体使用操作请参考
[
识别快速开始文档
](
../quick_start/quick_start_recognition.md
)
。
其中,检索部分配置如下,整体检索配置文件,请参考
`deploy/configs/inference_*.yaml`
文件。
其中,检索部分配置如下,整体检索配置文件,请参考
`deploy/configs/inference_*.yaml`
文件。
注意:此部分参数只是列举了离线检索相关部分参数。
```
yaml
```
yaml
IndexProcess
:
IndexProcess
:
index_dir
:
"
./recognition_demo_data_v1.1/gallery_logo/index/"
index_dir
:
"
./recognition_demo_data_v1.1/gallery_logo/index/"
return_k
:
5
return_k
:
5
score_thres
:
0.5
score_thres
:
0.5
hamming_radius
:
100
```
```
与建库配置文件不同,新参数主要如下:
与建库配置文件不同,新参数主要如下:
-
`return_k`
: 检索结果返回
`k`
个结果
-
`return_k`
: 检索结果返回
`k`
个结果
-
`score_thres`
: 检索匹配的阈值
-
`score_thres`
: 检索匹配的阈值
-
`hamming_radius`
: 汉明距离半径。此参数只有在使用二值特征模型,
`dist_type`
设置为
`hamming`
时才能生效。具体二值特征模型使用方法请参考
[
哈希编码
](
./deep_hashing.md
)
编辑
预览
Markdown
is supported
0%
请重试
或
添加新附件
.
添加附件
取消
You are about to add
0
people
to the discussion. Proceed with caution.
先完成此消息的编辑!
取消
想要评论请
注册
或
登录
{kind=link}