Update faq_2021_s1 (#572)
Showing
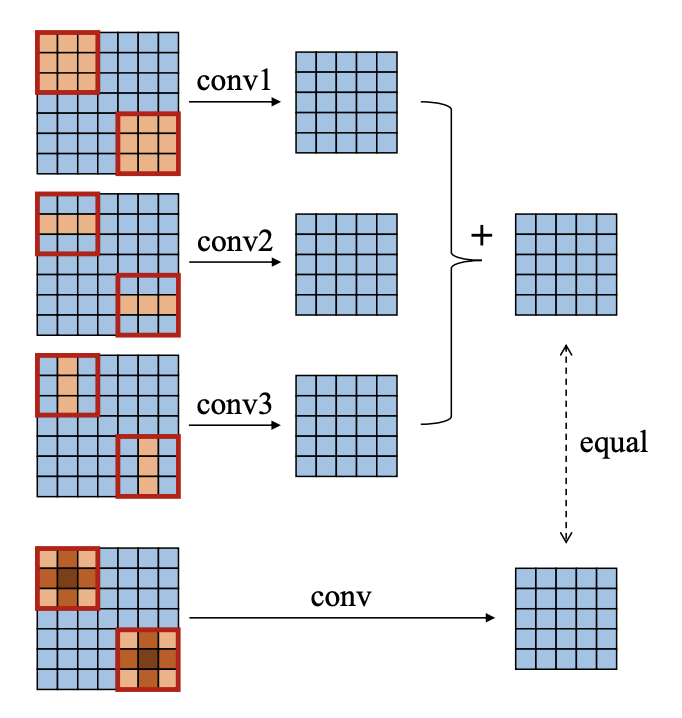
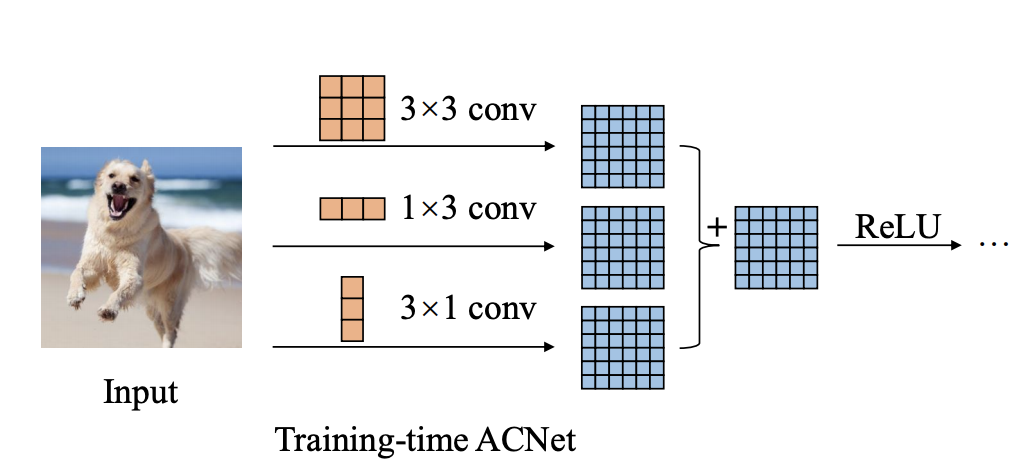
docs/images/faq/ACNetFusion.png
0 → 100644
{kind=link}

132.8 KB
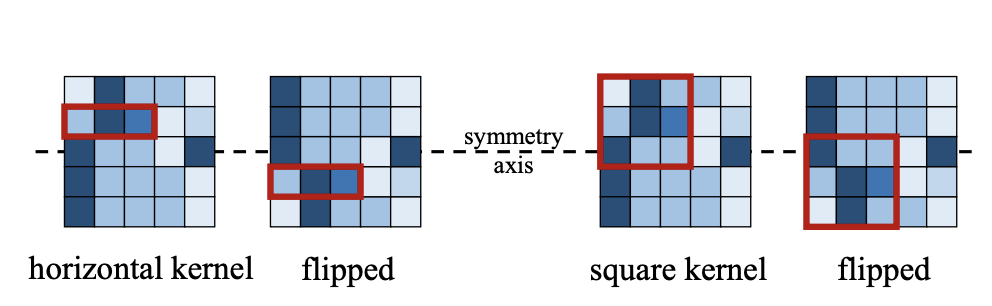
docs/images/faq/ACNetReParams.png
0 → 100644
{kind=link}
53.5 KB
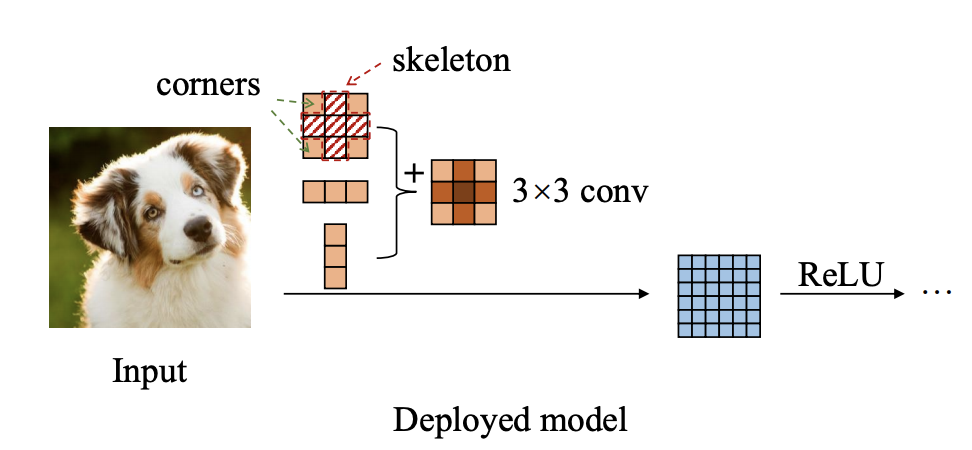
docs/images/faq/DeployedACNet.png
0 → 100644
{kind=link}
132.6 KB
{kind=link}
33.7 KB
{kind=link}
56.6 KB
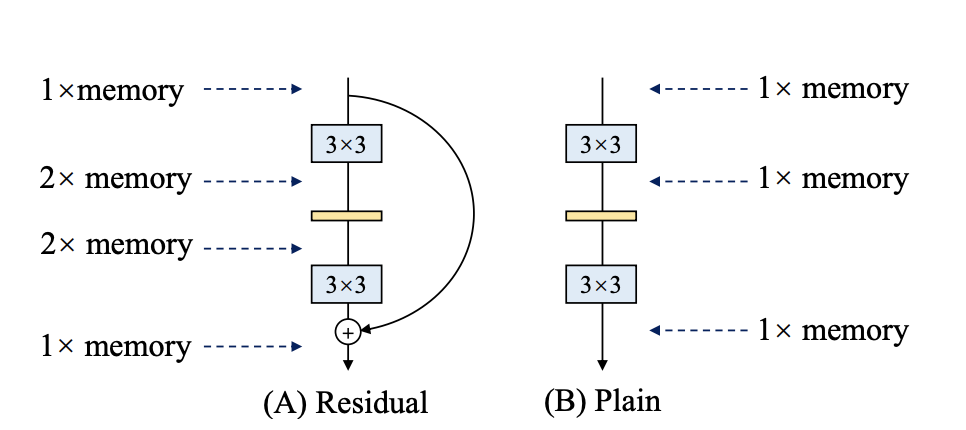
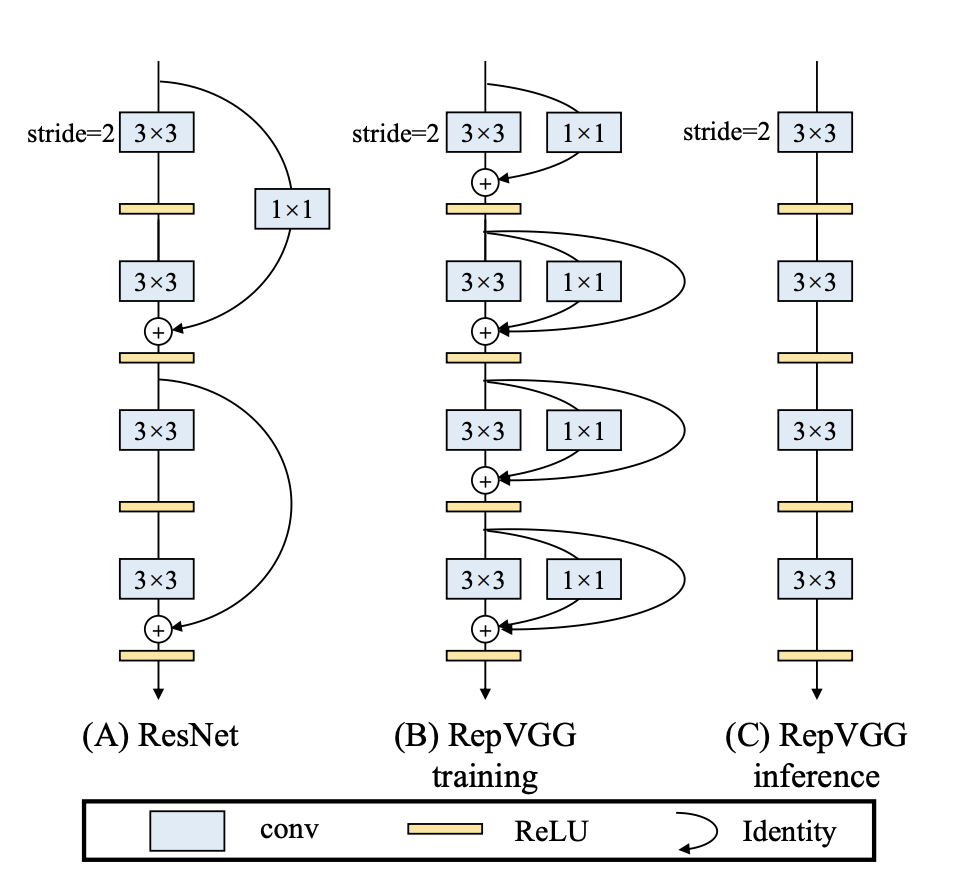
docs/images/faq/RepVGG.png
0 → 100644
{kind=link}
106.3 KB
{kind=link}
161.9 KB
{kind=link}
119.6 KB