add the tutorial: getting started (#97)
* add the tutorial: getting started * fix commemt * minor change
Showing
docs/getting_started.rst
0 → 100644
{kind=link}
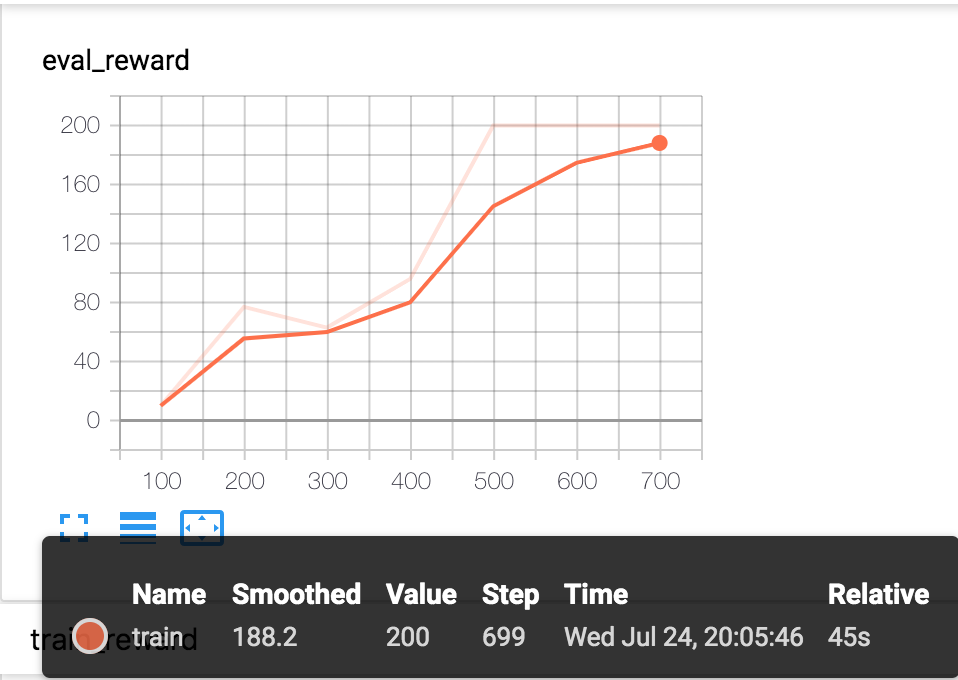
docs/images/quickstart.png
0 → 100644
{kind=link}
71.2 KB
docs/tutorial.rst
已删除
100644 → 0