add design doc (#13)
add design doc
Showing
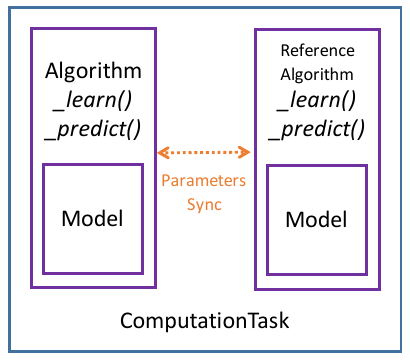
docs/ct.png
0 → 100644
{kind=link}
19.0 KB
docs/design_doc.md
0 → 100644
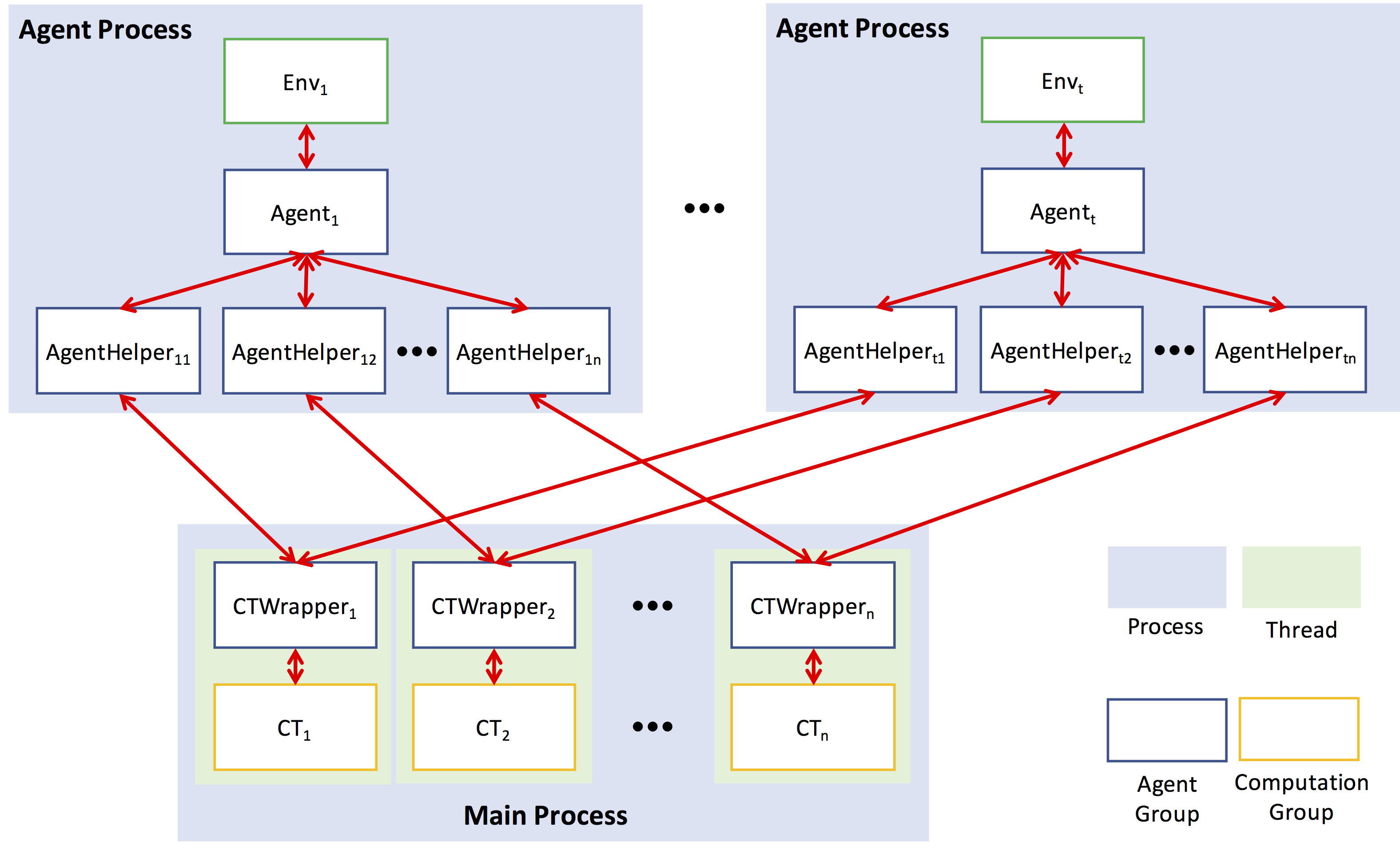
docs/framework.png
0 → 100644
{kind=link}
328.6 KB
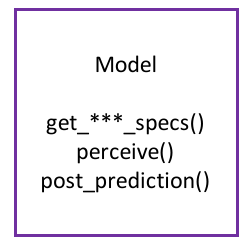
docs/model.png
0 → 100644
{kind=link}
10.5 KB
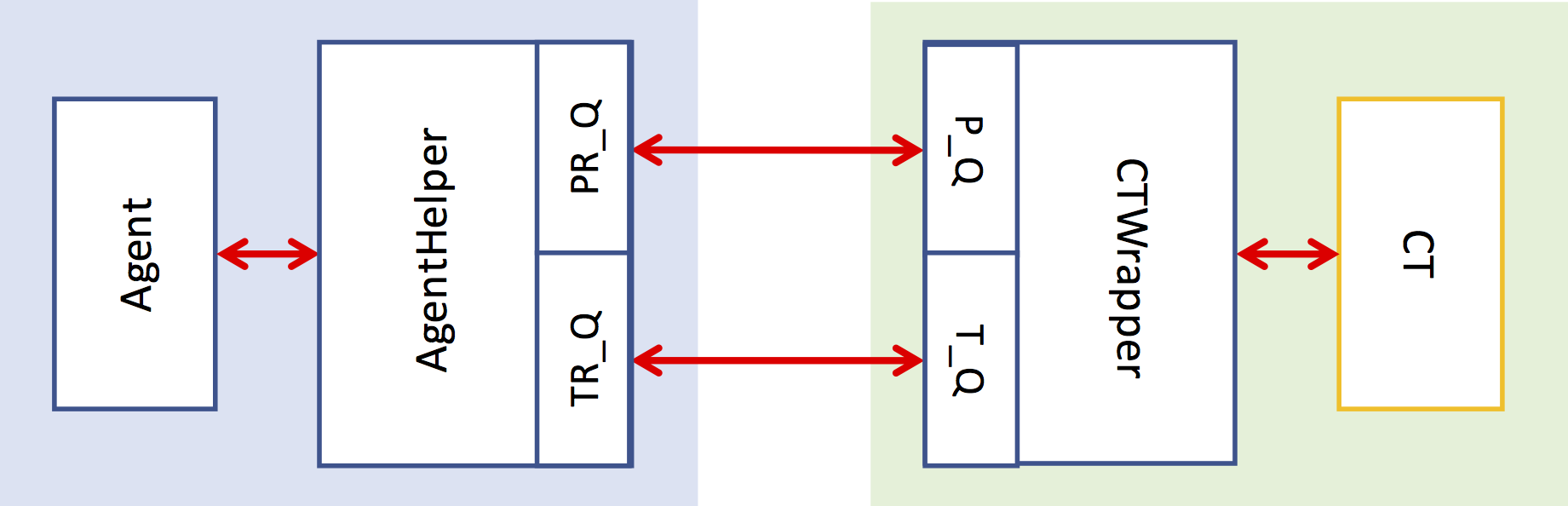
docs/relation.png
0 → 100644
{kind=link}
61.6 KB
docs/step.png
0 → 100644
{kind=link}
16.9 KB