add simple dqn demo (#254)
* add simple dqn * Update README.md * Update train.py * update * update image in README * update readme * simplify * yapf * Update README.md * Update README.md * Update README.md * Update train.py * yapf
Showing
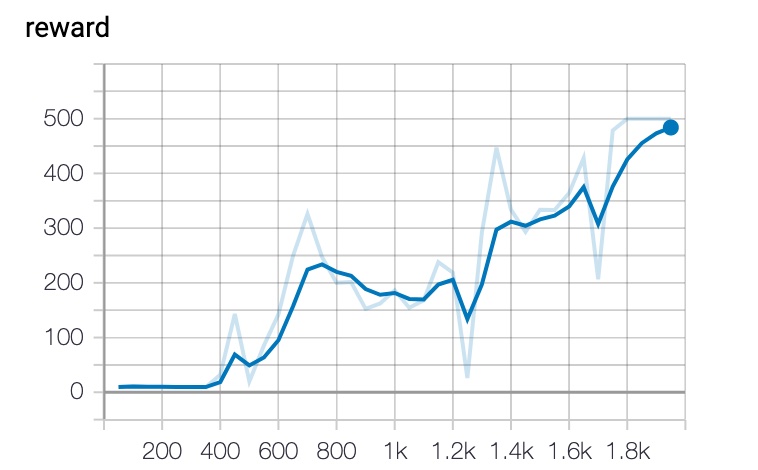
examples/DQN/cartpole.jpg
0 → 100644
{kind=link}
64.3 KB
examples/DQN/cartpole_agent.py
0 → 100755
examples/DQN/cartpole_model.py
0 → 100755
examples/DQN/replay_memory.py
100644 → 100755
examples/DQN/train.py
100644 → 100755
{kind=link}
{kind=link}
examples/DQN_variant/README.md
0 → 100644
文件已移动
examples/DQN_variant/train.py
0 → 100644