Merge branch 'master' of https://github.com/PaddlePaddle/AutoDL into add_more_config_for_lrc
Showing
.gitignore
0 → 100644
.pre-commit-config.yaml
0 → 100644
.style.yapf
0 → 100644
.travis/precommit.sh
0 → 100644
AutoDL Design/README.md
0 → 100644
AutoDL Design/__init__.py
0 → 100644
AutoDL Design/autodl.py
0 → 100644
AutoDL Design/autodl_agent.py
0 → 100755
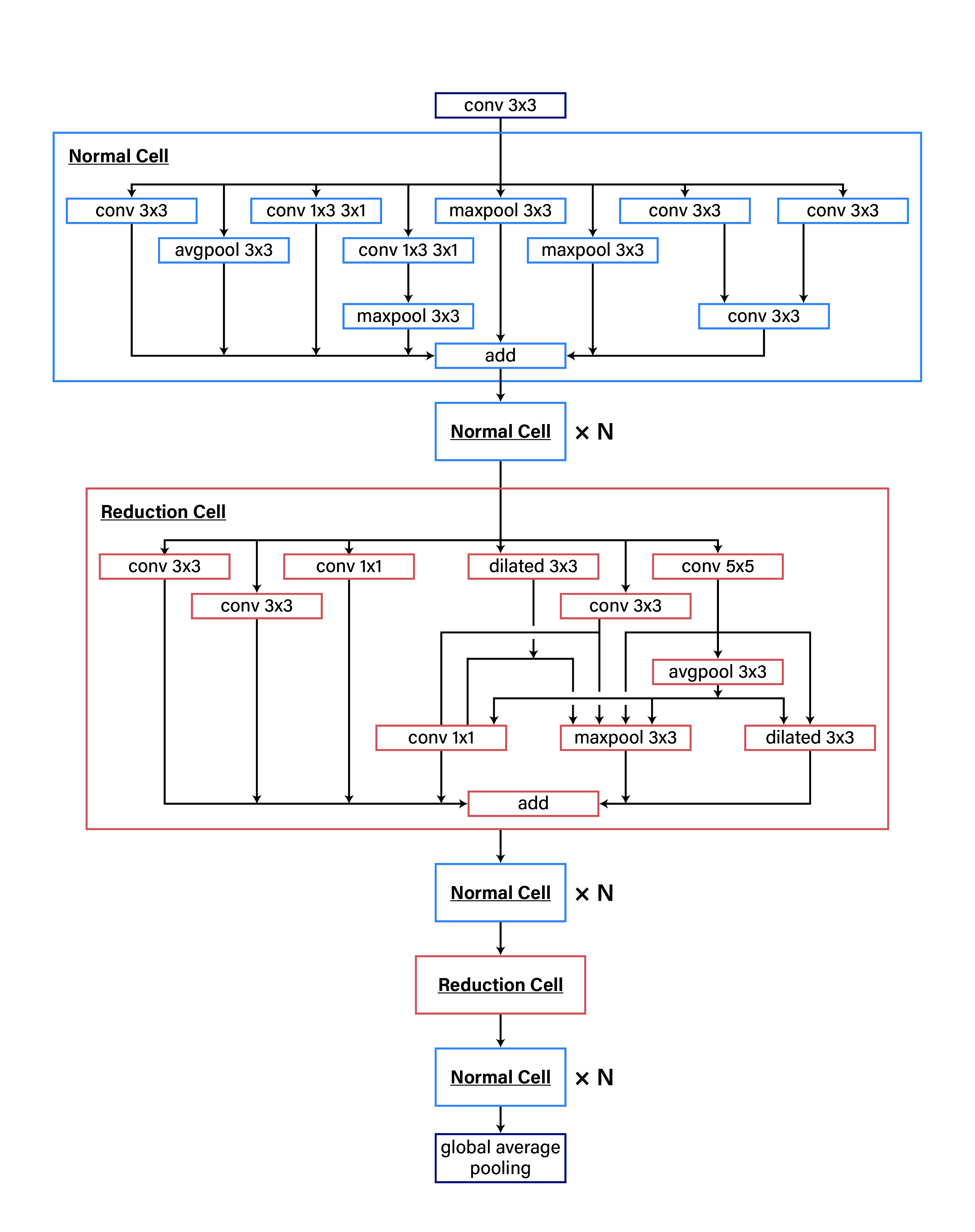
AutoDL Design/img/cnn_net.png
0 → 100644
{kind=link}
322.7 KB
{kind=link}
186.3 KB
AutoDL Design/main.py
0 → 100644
AutoDL Design/policy_model.py
0 → 100644
AutoDL Design/run.sh
0 → 100755
AutoDL Design/simple_main.py
0 → 100755
AutoDL Design/utils.py
0 → 100644
LRC/labels.npz
0 → 100644
文件已添加
LRC/paddle_predict/__init__.py
0 → 100644
LRC/run_cifar.sh
0 → 100644
LRC/run_cifar_test.sh
0 → 100644
LRC/test_mixup.py
0 → 100644
README.md
100644 → 100755