驱动子系统Camera模块开发指南标准化
修改说明:
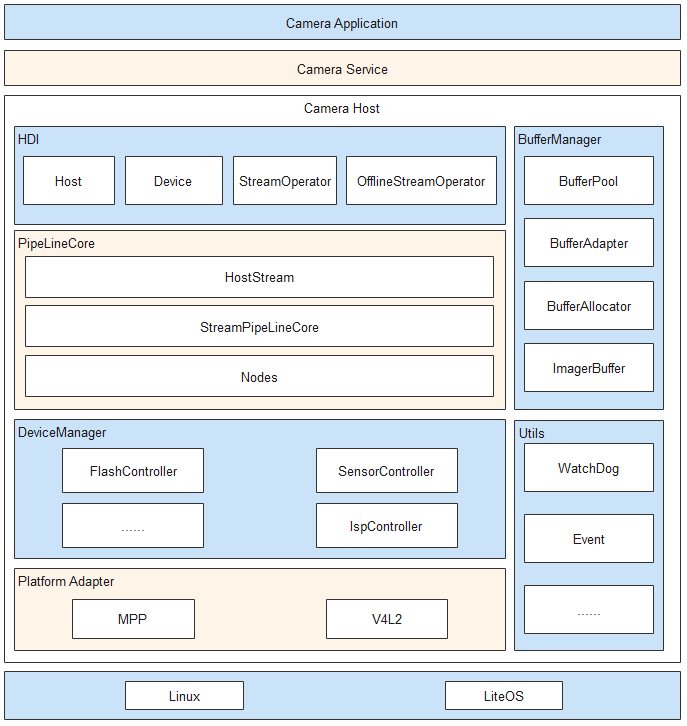
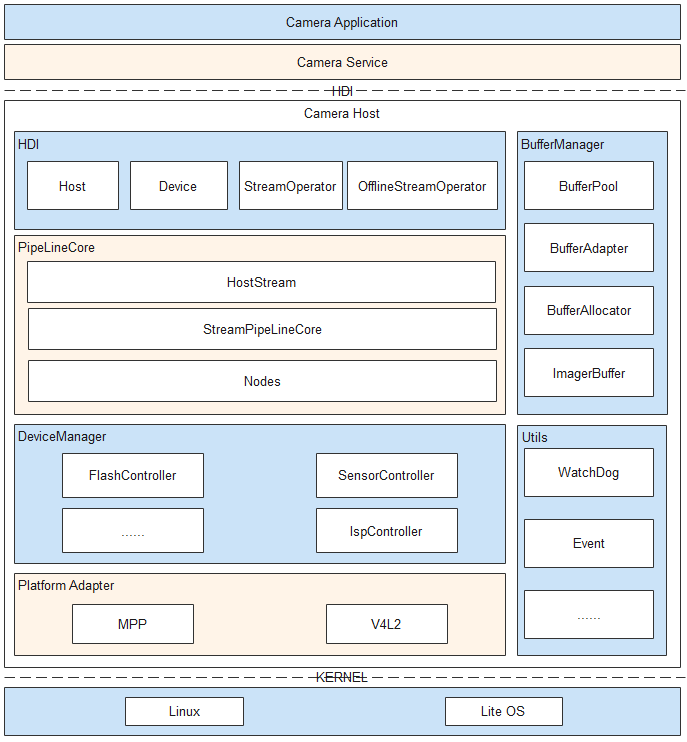
1、添加Camera模块驱动模型.png
2、Camera模块开发指南标准化
Signed-off-by:  lujianhui <1483564738@qq.com>
lujianhui <1483564738@qq.com>
Showing
{kind=link}
{kind=link}
| W: | H:
| W: | H:
修改说明:
1、添加Camera模块驱动模型.png
2、Camera模块开发指南标准化
Signed-off-by: lujianhui <1483564738@qq.com>
| W: | H:
| W: | H: