Skip to content
体验新版
项目
组织
正在加载...
登录
切换导航
打开侧边栏
OpenHarmony
Docs
提交
3de8353a
D
Docs
项目概览
OpenHarmony
/
Docs
大约 2 年 前同步成功
通知
161
Star
293
Fork
28
代码
文件
提交
分支
Tags
贡献者
分支图
Diff
Issue
0
列表
看板
标记
里程碑
合并请求
0
Wiki
0
Wiki
分析
仓库
DevOps
项目成员
Pages
D
Docs
项目概览
项目概览
详情
发布
仓库
仓库
文件
提交
分支
标签
贡献者
分支图
比较
Issue
0
Issue
0
列表
看板
标记
里程碑
合并请求
0
合并请求
0
Pages
分析
分析
仓库分析
DevOps
Wiki
0
Wiki
成员
成员
收起侧边栏
关闭侧边栏
动态
分支图
创建新Issue
提交
Issue看板
提交
3de8353a
编写于
10月 17, 2022
作者:
M
mn_manan
浏览文件
操作
浏览文件
下载
电子邮件补丁
差异文件
docs: Optimize light and vibrator development guide
Signed-off-by:
N
mn_manan
<
manan19@huawei.com
>
上级
4deb29fb
变更
3
隐藏空白更改
内联
并排
Showing
3 changed file
with
132 addition
and
118 deletion
+132
-118
zh-cn/device-dev/driver/driver-peripherals-light-des.md
zh-cn/device-dev/driver/driver-peripherals-light-des.md
+61
-58
zh-cn/device-dev/driver/driver-peripherals-vibrator-des.md
zh-cn/device-dev/driver/driver-peripherals-vibrator-des.md
+71
-60
zh-cn/device-dev/driver/figures/Light驱动模型图.png
zh-cn/device-dev/driver/figures/Light驱动模型图.png
+0
-0
未找到文件。
zh-cn/device-dev/driver/driver-peripherals-light-des.md
浏览文件 @
3de8353a
...
...
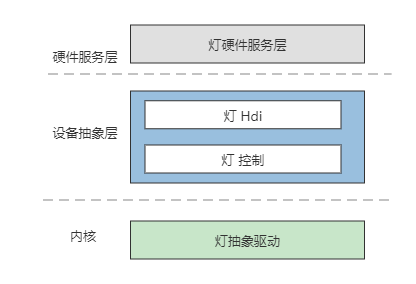
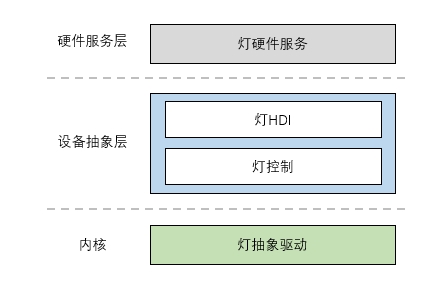
@@ -19,14 +19,14 @@ Light驱动模型为上层Light硬件服务层提供稳定的灯控制能力接

Light驱动模型以标准系统Hi3516DV300为例,介绍整个
驱动加载及运行流程:
以标准系统Hi3516DV300为例,介绍Light模块
驱动加载及运行流程:
1.
从device_info.hcs配置文件的Light Host里
读取Light设备管理配置信息。
2.
从light_config.hcs配置文件
读取Light数据配置信息。
3.
解析Light设备管理配置信息,并关联对应设备驱动
。
4.
客户端下发Light Stub控制到服务端
。
5.
服务端调用Light Stub控制
。
6.
启动Light抽象驱动接口
。
1.
Device Manager从device_info.hcs配置文件中
读取Light设备管理配置信息。
2.
Device Manager从light_config.hcs配置文件中
读取Light数据配置信息。
3.
HCS Parser解析Light设备管理配置信息,加载对应的Light Host,并控制Host完成驱动的加载
。
4.
Light Proxy获取到Light HDI接口服务实例后,通过IPC(Inter-Process Communication)调用到Light Stub
。
5.
Light Stub主要处理与IPC相关的业务逻辑,完成参数反序列化后调用Light Controller
。
6.
Light Controller中是HDI接口的真正实现,通过IPC调用Light抽象驱动接口,进一步操作Light硬件设备
。
## 开发指导
...
...
@@ -36,33 +36,32 @@ Light驱动模型以标准系统Hi3516DV300为例,介绍整个驱动加载及
### 接口说明
Light驱动模型支持获取系统中所有灯的信息
,动态配置闪烁模式和闪烁时间的能力。Light Hardware服务调用GetLightInfo获取Light设备的基本信息;调用TurnOnLight接口启动配置的闪烁效果
。Light驱动模型对外开放的API接口能力,参考表1。
Light驱动模型支持获取系统中所有灯的信息
、动态配置闪烁模式和闪烁时间的能力。Light硬件服务调用GetLightInfo获取Light设备的基本信息,调用TurnOnLight接口启动配置的闪烁效果,调用TurnOffLight接口关闭Light设备
。Light驱动模型对外开放的API接口能力,参考表1。
**表1**
Light驱动模型对外API接口能力介绍
| 接口名 | 功能描述 |
| ------------------------------------------------------------ | ------------------------------------------------------------ |
|
int32_t (
*GetLightInfo)(struct LightInfo **lightInfo, uint32_t *
count) | 获取系统中所有灯的信息,lightInfo表示灯设备的基本信息,count表示获取灯的个数
。 |
|
int32_t (
*TurnOnLight)(uint32_t lightId, struct LightEffect *
effect) | 根据指定的灯类型打开灯列表中可用的灯,lightId表示灯类型,effect表示要设置的效果信息
。 |
|
int32_t (
*
TurnOffLight)(uint32_t lightId) | 根据指定的灯类型关闭灯列表中可用的灯。
|
|
GetLightInfo([out] struct HdfLightInfo[] info) | 获取当前系统中所有类型的灯信息,info表示指向灯信息的二级指针
。 |
|
TurnOnLight([in] int lightId, [in] struct HdfLightEffect effect) | 根据指定的灯类型ID打开列表中的可用灯,lightId表示灯类型,effect表示指向灯效果的指针
。 |
|
TurnOffLight([in] int lightId) | 根据指定的灯类型ID关闭列表中的可用灯。
|
### 开发步骤
1.
基于HDF驱动框架,按照驱动Driver Entry程序,完成Light抽象驱动开发(主要由Bind、Init、Release、Dispatch函数接口实现),资源配置及HCS配置文件解析。
完成Light驱动的设备信息配置。
1.
基于HDF驱动框架,按照驱动Driver Entry程序,完成Light抽象驱动开发(主要由Bind、Init、Release、Dispatch函数接口实现),资源配置及HCS配置文件解析。
-
调用HDF_INIT将驱动入口注册到HDF框架中。在加载驱动时HDF框架会先调用Bind函数,再调用Init函数加载该驱动。当Init调用异常时,HDF框架会调用Release释放驱动资源并退出。
Light驱动模型使用HCS配置文件作为配置描述源码。HCS配置字段详细介绍请参考
[
配置管理
](
driver-hdf-manage.md
)
。
其Driver Entry入口函数定义如下:
-
Light驱动模型使用HCS配置文件作为配置描述源码。HCS配置字段详细介绍请参考
[
配置管理
](
driver-hdf-manage.md
)
。其Driver Entry入口函数定义如下:
```c
/* 注册灯入口数据结构体对象 */
struct HdfDriverEntry g_lightDriverEntry = {
.moduleVersion = 1, // 灯模块版本号
.moduleName = "HDF_LIGHT", // 灯模块名,要与device_info.hcs文件里灯moduleName字段值一样
.Bind = BindLightDriver, // 灯绑定函数
.Init = InitLightDriver, // 灯初始化函数
.moduleVersion = 1,
// 灯模块版本号
.moduleName = "HDF_LIGHT",
// 灯模块名,要与device_info.hcs文件里灯moduleName字段值一样
.Bind = BindLightDriver,
// 灯绑定函数
.Init = InitLightDriver,
// 灯初始化函数
.Release = ReleaseLightDriver, // 灯资源释放函数
};
/* 调用HDF_INIT将驱动入口注册到HDF框架中
。在加载驱动时HDF框架会先调用Bind函数,再调用Init函数加载该驱动。当Init调用异常时,HDF框架会调用Release函数释放驱动资源并退出
*/
/* 调用HDF_INIT将驱动入口注册到HDF框架中 */
HDF_INIT(g_lightDriverEntry);
```
...
...
@@ -120,7 +119,7 @@ Light驱动模型支持获取系统中所有灯的信息,动态配置闪烁模
}
/* 工作项初始化 */
if (HdfWorkInit(&drvData->work, LightWorkEntry, (void*)drvData) != HDF_SUCCESS) {
HDF_LOGE("%s: init work
Queue
fail!", __func__);
HDF_LOGE("%s: init work fail!", __func__);
return HDF_FAILURE;
}
/* 解析HCS配置文件 */
...
...
@@ -158,30 +157,34 @@ Light驱动模型支持获取系统中所有灯的信息,动态配置闪烁模
}
```
-
Light设备管理模块负责系统中Light器件接口发布。在系统启动过程中,HDF框架机制通过Light Host里设备HCS配置信息,加载设备管理驱动。
-
Light设备管理模块负责系统中Light器件接口发布。在系统启动过程中,HDF框架机制通过Light Host里
的
设备HCS配置信息,加载设备管理驱动。
```
```
c
/* Light设备HCS配置 */
device_light :: device {
device0 :: deviceNode {
policy = 2; // 驱动服务发布的策略(0:不提供服务,1:对内核态发布服务;2:对内核态和用户态都发布服务)
priority = 100; // Light驱动启动优先级(0-200),值越大优先级越低,建议配置为100,优先级相同则不保证device的加载顺序
preload = 0; // 驱动按需加载字段,0:加载;2:不加载
permission = 0664; // 驱动创建设备节点权限
moduleName = "HDF_LIGHT"; // Light驱动名称,该字段的值必须和驱动入口结构的moduleName值一致
serviceName = "hdf_light"; // Light驱动对外发布服务的名称,必须唯一
deviceMatchAttr = "hdf_light_driver"; // 驱动私有数据匹配的关键字,必须和驱动私有数据配置表中的match_attr值相等
light :: host {
hostName = "light_host";
device_light :: device {
device0 :: deviceNode {
policy = 2; // 驱动服务发布的策略(0:不提供服务,1:对内核态发布服务;2:对内核态和用户态都发布服务)
priority = 100; // Light驱动启动优先级(0-200),值越大优先级越低,建议配置为100,优先级相同则不保证device的加载顺序
preload = 0; // 驱动按需加载字段,0:加载;2:不加载
permission = 0664; // 驱动创建设备节点权限
moduleName = "HDF_LIGHT"; // Light驱动名称,该字段的值必须和驱动入口结构的moduleName值一致
serviceName = "hdf_light"; // Light驱动对外发布服务的名称,必须唯一
deviceMatchAttr = "hdf_light_driver"; // 驱动私有数据匹配的关键字,必须和驱动私有数据配置表中的match_attr值相等
}
}
}
```
2.
调用配置解析接口,完成器件属性信息解析
,
器件寄存器解析,并注册到Light设备管理中。
2.
调用配置解析接口,完成器件属性信息解析
、
器件寄存器解析,并注册到Light设备管理中。
```
c
/* 分配资源,解析灯HCS配置。 */
static
int32_t
ParseLightInfo
(
const
struct
DeviceResourceNode
*
node
,
const
struct
DeviceResourceIface
*
parser
)
{
.....
/* 从HCS配置获取支持
灯的
类型个数 */
/* 从HCS配置获取支持
的灯
类型个数 */
drvData
->
lightNum
=
parser
->
GetElemNum
(
light
,
"lightId"
);
....
for
(
i
=
0
;
i
<
drvData
->
lightNum
;
++
i
)
{
...
...
@@ -191,38 +194,39 @@ Light驱动模型支持获取系统中所有灯的信息,动态配置闪烁模
}
for
(
i
=
0
;
i
<
drvData
->
lightNum
;
++
i
)
{
.....
/* 类型作为下标开辟空间 */
drvData
->
info
[
temp
]
=
(
struct
LightDeviceInfo
*
)
OsalMemCalloc
(
sizeof
(
struct
LightDeviceInfo
));
.....
/* 将Light设备信息进行填充 */
ret
=
parser
->
GetUint32
(
node
,
"busRNum"
,
(
uint32_t
*
)
&
drvData
->
info
[
temp
]
->
busRNum
,
0
);
if
(
ret
!=
HDF_SUCCESS
)
{
/* 如果没有成功获取busNum,代表不支持设置busNum对应颜色的灯。 */
drvData
->
info
[
temp
]
->
busRNum
=
LIGHT_INVALID_GPIO
;
}
ret
=
parser
->
GetUint32
(
node
,
"busGNum"
,
(
uint32_t
*
)
&
drvData
->
info
[
temp
]
->
busGNum
,
0
);
if
(
ret
!=
HDF_SUCCESS
)
{
drvData
->
info
[
temp
]
->
busGNum
=
LIGHT_INVALID_GPIO
;
}
ret
=
parser
->
GetUint32
(
node
,
"busBNum"
,
(
uint32_t
*
)
&
drvData
->
info
[
temp
]
->
busBNum
,
0
);
if
(
ret
!=
HDF_SUCCESS
)
{
drvData
->
info
[
temp
]
->
busBNum
=
LIGHT_INVALID_GPIO
;
.....
/* 类型作为下标开辟空间 */
drvData
->
info
[
temp
]
=
(
struct
LightDeviceInfo
*
)
OsalMemCalloc
(
sizeof
(
struct
LightDeviceInfo
));
.....
/* 将Light设备信息进行填充 */
ret
=
parser
->
GetUint32
(
node
,
"busRNum"
,
(
uint32_t
*
)
&
drvData
->
info
[
temp
]
->
busRNum
,
0
);
if
(
ret
!=
HDF_SUCCESS
)
{
/* 如果没有成功获取busNum,代表不支持设置busNum对应颜色的灯。 */
drvData
->
info
[
temp
]
->
busRNum
=
LIGHT_INVALID_GPIO
;
}
ret
=
parser
->
GetUint32
(
node
,
"busGNum"
,
(
uint32_t
*
)
&
drvData
->
info
[
temp
]
->
busGNum
,
0
);
if
(
ret
!=
HDF_SUCCESS
)
{
drvData
->
info
[
temp
]
->
busGNum
=
LIGHT_INVALID_GPIO
;
}
ret
=
parser
->
GetUint32
(
node
,
"busBNum"
,
(
uint32_t
*
)
&
drvData
->
info
[
temp
]
->
busBNum
,
0
);
if
(
ret
!=
HDF_SUCCESS
)
{
drvData
->
info
[
temp
]
->
busBNum
=
LIGHT_INVALID_GPIO
;
}
}
.....
return
HDF_SUCCESS
;
}
```
3.
完成Light
获取类型、闪烁和停止接口开发,会
根据闪烁模式创建和销毁定时器。
3.
完成Light
类型获取、闪烁模式设置和停止的接口开发,并实现
根据闪烁模式创建和销毁定时器。
```
c
/* Light驱动服务调用GetAllLightInfo
获取灯类型,
TurnOnLight接口启动闪烁模式,
/* Light驱动服务调用GetAllLightInfo
接口获取灯类型,调用
TurnOnLight接口启动闪烁模式,
调用TurnOffLight接口停止闪烁。 */
static
int32_t
GetAllLightInfo
(
struct
HdfSBuf
*
data
,
struct
HdfSBuf
*
reply
)
{
.....
/* 获取灯
的类型
个数 */
/* 获取灯
类型的
个数 */
if
(
!
HdfSbufWriteUint32
(
reply
,
drvData
->
lightNum
))
{
HDF_LOGE
(
"%s: write sbuf fail"
,
__func__
);
return
HDF_FAILURE
;
...
...
@@ -302,13 +306,13 @@ Light驱动模型支持获取系统中所有灯的信息,动态配置闪烁模
/* 创建定时器 */
if
(
OsalTimerCreate
(
&
drvData
->
timer
,
drvData
->
info
[
lightId
]
->
onTime
,
LightTimerEntry
,
(
uintptr_t
)
lightId
)
!=
HDF_SUCCESS
)
{
HDF_LOGE
(
"%s: create light timer fail!"
,
__func__
);
return
HDF_FAILURE
;
HDF_LOGE
(
"%s: create light timer fail!"
,
__func__
);
return
HDF_FAILURE
;
}
/* 启动周期定时器 */
if
(
OsalTimerStartLoop
(
&
drvData
->
timer
)
!=
HDF_SUCCESS
)
{
HDF_LOGE
(
"%s: start light timer fail!"
,
__func__
);
return
HDF_FAILURE
;
HDF_LOGE
(
"%s: start light timer fail!"
,
__func__
);
return
HDF_FAILURE
;
}
}
return
HDF_SUCCESS
;
...
...
@@ -427,4 +431,3 @@ HWTEST_F(HdfLightTest, EnableLight002, TestSize.Level1)
}
}
```
zh-cn/device-dev/driver/driver-peripherals-vibrator-des.md
浏览文件 @
3de8353a
...
...
@@ -4,7 +4,7 @@
### 功能简介
为了快速开发
传感器
驱动,基于HDF(Hardware Driver Foundation)驱动框架开发了马达(Vibrator)驱动模型。马达驱动模型,屏蔽设备驱动与系统交互的实现,为硬件服务层提供统一稳定的驱动接口能力,为驱动开发者提供开放的接口和解析接口的能力,用于不同操作系统马达设备部件的部署指导和马达设备部件驱动的开发。马达驱动模型如图1所示:
为了快速开发
马达
驱动,基于HDF(Hardware Driver Foundation)驱动框架开发了马达(Vibrator)驱动模型。马达驱动模型,屏蔽设备驱动与系统交互的实现,为硬件服务层提供统一稳定的驱动接口能力,为驱动开发者提供开放的接口和解析接口的能力,用于不同操作系统马达设备部件的部署指导和马达设备部件驱动的开发。马达驱动模型如图1所示:
**图 1**
马达驱动模型图
...
...
@@ -12,7 +12,17 @@
### 基本概念
系统通过调用马达实现对设备的振动控制。目前,马达只有两种振动方式:
根据振动原理的不同,目前马达可以分为两种:
-
转子马达
转子马达依靠旋转带动配重振动,分为普通转子和币型转子两种。转子马达的启停反应慢,并且无法实现多种振动模式,但其优点是成本低且体积小。
-
线性马达
线性马达依靠磁力快速抖动配重来振动,分为纵向线性马达和横向线性马达两种。线性马达的启停都非常快,可以实现不同振感且具有良好的方向性。
系统通过调用马达驱动接口实现对设备的振动控制。目前,马达只有两种振动方式:
-
单次振动
...
...
@@ -20,7 +30,7 @@
-
周期振动
周期振动是指按照预置的效果模式控制振动。例如:预置效果为“haptic.clock.timer” = [600, 600, 200, 600],等待600ms,振动600ms,等待200ms,振动600ms。
周期振动是指按照预置的效果模式控制振动。例如:预置效果为“haptic.clock.timer” = [600, 600, 200, 600],
表示
等待600ms,振动600ms,等待200ms,振动600ms。
### 运作机制
...
...
@@ -30,18 +40,18 @@

马达驱动模型以标准系统Hi3516DV300产品为例,介绍整个
驱动加载及运行流程:
以标准系统Hi3516DV300产品为例,介绍马达模块
驱动加载及运行流程:
1.
从device_info.hcs配置文件中的Vibrator Host
读取Vibrator管理配置信息。
2.
解析Vibrator管理配置信息,并关联对应
马达抽象驱动。
3.
从linear_vibrator_config.hcs配置文件中读取Vibrator数据配置信息。
4.
解析Vibrator数据配置信息,并关联对应
Haptic驱动。
5.
客户端下发Vibrator Stub控制到服务端
。
6.
Vibrator Stub
控制调用马达服务
。
7.
初始化马达
抽象驱动接口。
8.
Haptic
中起线程,解析效果模块。
9.
Haptic调用马达抽象驱动中的Start接口。
10.
马达抽象驱动
调用马达差异化驱动中的Start接口
。
1.
Device Manager从device_info.hcs配置文件中
读取Vibrator管理配置信息。
2.
HCS Parser解析Vibrator管理配置信息,并加载对应的
马达抽象驱动。
3.
Device Manager
从linear_vibrator_config.hcs配置文件中读取Vibrator数据配置信息。
4.
HCS Parser解析Vibrator数据配置信息,并加载对应的
Haptic驱动。
5.
Vibrator Proxy获取到Vibrator HDI接口服务实例后,通过IPC(Inter-Process Communication)调用到Vibrator Stub
。
6.
Vibrator Stub
主要处理与IPC相关的业务逻辑,完成参数反序列化后调用Vibrator Controller
。
7.
Vibrator Controller中是HDI接口的真正实现,通过IPC调用Vibrator
抽象驱动接口。
8.
在Haptic驱动
中起线程,解析效果模块。
9.
Haptic
驱动
调用马达抽象驱动中的Start接口。
10.
马达抽象驱动
进一步调用马达差异化驱动中的Start接口,控制马达设备以给定的效果振动
。
## 开发指导
...
...
@@ -51,36 +61,36 @@
### 接口说明
马达驱动模型支持静态HCS配置和动态参数两种振动效果配置能力。马达硬件服务调用StartOnce接口动态配置持续振动
;
调用Start接口启动静态配置的振动效果。马达驱动模型对HDI开放的API接口能力,如下表所示。
马达驱动模型支持静态HCS配置和动态参数两种振动效果配置能力。马达硬件服务调用StartOnce接口动态配置持续振动
,
调用Start接口启动静态配置的振动效果。马达驱动模型对HDI开放的API接口能力,如下表所示。
**表 1**
马达驱动模型对外API接口能力介绍
| 接口名 | 功能描述 |
| -------------------------------------- | ------------------------------------------------ |
|
int32_t StartOnce(uint32_t duration) | 按照指定持续时间触发振动马达,duration为振动持续时长
。 |
|
int32_t Start(const char
*
effectType) | 按照指定预置效果启动马达,effectType表示预置的预置效果
。 |
|
int32_t Stop(enum VibratorMode mode) | 按照指定的振动模式停止马达振动
。 |
|
int32_t EnableVibratorModulation(uint32_t duration, int32_t intensity, int32_t frequency) | 按照指定振幅、频率、持续时间触发振动马达。duration为振动持续时长,intensity为振动强度,frequency为振动
频率。 |
|
int32_t GetVibratorInfo(struct VibratorInfo
**
vibratorInfo); | 获取马达信息,包括是否支持振幅和频率的设置及振幅和频率的设置范围
。 |
|
StartOnce([in] unsigned int duration) | 控制马达以执行给定持续时间的单次振动,duration表示单次振动的持续时间
。 |
|
Start([in] String effectType) | 控制马达以预置效果执行周期性振动,effectType表示马达振动的预设效果类型
。 |
|
Stop([in] enum HdfVibratorMode mode) | 停止马达振动,mode表示振动模式,可以是单次或周期性的
。 |
|
EnableVibratorModulation([in] unsigned int duration, [in] int intensity, [in] int frequency) | 根据传入的振动效果启动马达,duration表示马达振动的持续时间,intensity表示振动周期内的马达振幅,frequency表示振动周期内的马达
频率。 |
|
GetVibratorInfo([out] struct HdfVibratorInfo[] vibratorInfo) | 获取系统中支持设置振幅和频率的所有马达信息,vibratorInfo表示指向马达信息的指针
。 |
### 开发步骤
Vibrator驱动模型为上层马达硬件服务层提供稳定的马达控制能力接口,包括马达一次振动、马达效果配置震动、马达停止。基于HDF驱动框架开发的马达驱动模型,实现跨操作系统迁移、器件差异配置等功能。具体的开发步骤如下:
1.
基于HDF驱动框架,按照驱动Driver Entry程序,完成马达抽象驱动开发
,主要由Bind、Init、Release、Dispatch函数接口实现
,配置资源和HCS解析。
1.
基于HDF驱动框架,按照驱动Driver Entry程序,完成马达抽象驱动开发
(主要由Bind、Init、Release、Dispatch函数接口实现)
,配置资源和HCS解析。
-
调用HDF_INIT将驱动入口注册到HDF框架中
,
在加载驱动时HDF框架会先调用Bind函数,再调用Init函数加载该驱动。当Init调用异常时,HDF框架会调用Release释放驱动资源并退出马达驱动模型,使用HCS作为配置描述源码。HCS配置字段详细介绍参考
[
配置管理
](
driver-hdf-manage.md
)
。其中Driver Entry入口函数定义如下:
-
调用HDF_INIT将驱动入口注册到HDF框架中
。
在加载驱动时HDF框架会先调用Bind函数,再调用Init函数加载该驱动。当Init调用异常时,HDF框架会调用Release释放驱动资源并退出马达驱动模型,使用HCS作为配置描述源码。HCS配置字段详细介绍参考
[
配置管理
](
driver-hdf-manage.md
)
。其中Driver Entry入口函数定义如下:
```c
/* 注册马达抽象驱动入口数据结构体对象 */
struct HdfDriverEntry g_vibratorDriverEntry = {
.moduleVersion = 1, // 马达模块版本号
.moduleName = "HDF_VIBRATOR", // 马达模块名,要与device_info.hcs文件里的马达moduleName字段值一样
.Bind = BindVibratorDriver, // 马达绑定函数
.Init = InitVibratorDriver, // 马达初始化函数
.moduleVersion = 1,
// 马达模块版本号
.moduleName = "HDF_VIBRATOR",
// 马达模块名,要与device_info.hcs文件里的马达moduleName字段值一样
.Bind = BindVibratorDriver,
// 马达绑定函数
.Init = InitVibratorDriver,
// 马达初始化函数
.Release = ReleaseVibratorDriver, // 马达资源释放函数
};
/* 调用HDF_INIT将驱动入口注册到HDF框架中 */
HDF_INIT(g_vibratorDriverEntry);
```
...
...
@@ -152,18 +162,19 @@ Vibrator驱动模型为上层马达硬件服务层提供稳定的马达控制能
```c
/* 马达设备HCS配置 */
vibrator :: host {
hostName = "vibrator_host";
device_vibrator :: device {
device0 :: deviceNode {
policy = 2; // 驱动服务发布的策略
priority = 100; // 驱动启动优先级(0-200),值越大优先级越低,建议配置100,优先级相同则不保证device的加载顺序
preload = 0; // 驱动按需加载字段,0表示加载,2表示不加载
permission = 0664; // 驱动创建设备节点权限
moduleName = "HDF_VIBRATOR"; // 驱动名称,该字段的值必须和驱动入口结构的moduleName值一致
serviceName = "hdf_misc_vibrator"; // 驱动对外发布服务的名称,必须唯一
deviceMatchAttr = "hdf_vibrator_driver"; // 驱动私有数据匹配的关键字,必须和驱动私有数据配置表中的match_attr值相等
}
}
hostName = "vibrator_host";
device_vibrator :: device {
device0 :: deviceNode {
policy = 2; // 驱动服务发布的策略
priority = 100; // 驱动启动优先级(0-200),值越大优先级越低,建议配置100,优先级相同则不保证device的加载顺序
preload = 0; // 驱动按需加载字段,0表示加载,2表示不加载
permission = 0664; // 驱动创建设备节点权限
moduleName = "HDF_VIBRATOR"; // 驱动名称,该字段的值必须和驱动入口结构的moduleName值一致
serviceName = "hdf_misc_vibrator"; // 驱动对外发布服务的名称,必须唯一
deviceMatchAttr = "hdf_vibrator_driver"; // 驱动私有数据匹配的关键字,必须和驱动私有数据配置表中的match_attr值相等
}
}
}
```
2.
创建马达效果模型,解析马达效果HCS配置。
...
...
@@ -202,23 +213,23 @@ Vibrator驱动模型为上层马达硬件服务层提供稳定的马达控制能
}
```
-
马达效果模型使用HCS作为配置描述源码,
hcs
配置文件字段详细介绍参考
[
配置管理
](
driver-hdf-manage.md
)
。
-
马达效果模型使用HCS作为配置描述源码,
HCS
配置文件字段详细介绍参考
[
配置管理
](
driver-hdf-manage.md
)
。
```
hcs
```
c
/* 马达数据配置模板(vibrator_config.hcs) */
root {
vibratorConfig {
boardConfig {
match_attr = "hdf_vibrator_driver"; // 需要和马达设备配置match_attr字段保持一致
match_attr = "hdf_vibrator_driver"; // 需要和马达设备配置
文件中的
match_attr字段保持一致
vibratorAttr {
/* 0:转子;1:线性 */
deviceType = 1; // 设备类型
supportPreset = 1; // 支持的预设类型
deviceType = 1;
// 设备类型
supportPreset = 1;
// 支持的预设类型
}
vibratorHapticConfig {
haptic_clock_timer {
effectName = "haptic.clock.timer";
type = 1; // 0:内置模式;1:时间序列
type = 1;
// 0:内置模式;1:时间序列
seq = [600, 600, 200, 600]; // 时间序列
}
haptic_default_effect {
...
...
@@ -232,9 +243,9 @@ Vibrator驱动模型为上层马达硬件服务层提供稳定的马达控制能
}
```
3.
完成马达
振动和停止接口开发,会根据振动效果的
模式创建和销毁定时器。
3.
完成马达
信息获取、振动模式设置和停止的接口开发,并实现根据振动
模式创建和销毁定时器。
马达硬件服务调用StartOnce接口动态配置持续振动时间
;
调用StartEffect接口启动静态配置的振动效果,为驱动开发者提供抽象的配置接口能力。
马达硬件服务调用StartOnce接口动态配置持续振动时间
,
调用StartEffect接口启动静态配置的振动效果,为驱动开发者提供抽象的配置接口能力。
```
c
/* 按照指定持续时间触发振动马达,duration为振动持续时长。 */
...
...
@@ -259,7 +270,7 @@ Vibrator驱动模型为上层马达硬件服务层提供稳定的马达控制能
return
HDF_SUCCESS
;
}
/* 按照预置效果启动马达,effectType表示预置的
预置
效果。 */
/* 按照预置效果启动马达,effectType表示预置的
振动
效果。 */
static
int32_t
StartEffect
(
struct
HdfSBuf
*
data
,
struct
HdfSBuf
*
reply
)
{
int32_t
ret
;
...
...
@@ -313,11 +324,11 @@ Vibrator驱动模型为上层马达硬件服务层提供稳定的马达控制能
int32_t
intensity
;
int32_t
frequency
;
int32_t
ret
;
.....
.....
(
void
)
OsalMutexLock
(
&
drvData
->
mutex
);
drvData
->
mode
=
VIBRATOR_MODE_ONCE
;
(
void
)
OsalMutexUnlock
(
&
drvData
->
mutex
);
/* 设置振幅和频率 */
/* 设置振幅和频率 */
ret
=
drvData
->
ops
.
SetParameter
(
intensity
,
frequency
);
if
(
ret
!=
HDF_SUCCESS
)
{
HDF_LOGE
(
"%s: set parameter failed"
,
__func__
);
...
...
@@ -380,7 +391,7 @@ Vibrator驱动模型为上层马达硬件服务层提供稳定的马达控制能
}
/* 注册马达信息接口 */
int32_t RegisterVibratorInfo(struct VibratorInfo *vibratorInfo)
int32_t RegisterVibratorInfo(struct VibratorInfo *vibratorInfo)
{
struct VibratorDriverData *drvData = GetVibratorDrvData();
...
...
@@ -407,29 +418,29 @@ Vibrator驱动模型为上层马达硬件服务层提供稳定的马达控制能
static int32_t StopModulationParameter()
{
uint8_t value[DRV2605L_VALUE_BUTT];
struct Drv2605lDriverData *drvData = NULL;
struct Drv2605lDriverData *drvData = NULL;
drvData = GetDrv2605lDrvData();
CHECK_VIBRATOR_NULL_PTR_RETURN_VALUE(drvData, HDF_FAILURE);
CHECK_VIBRATOR_NULL_PTR_RETURN_VALUE(drvData, HDF_FAILURE);
CHECK_VIBRATOR_NULL_PTR_RETURN_VALUE(drvData->drv2605lCfgData, HDF_FAILURE);
value[DRV2605L_ADDR_INDEX] = (uint8_t)DRV2605_REG_MODE;
value[DRV2605L_VALUE_INDEX] = (uint8_t)DRV2605_MODE_STANDBY;
if (WriteDrv2605l(&drvData->drv2605lCfgData->vibratorBus.i2cCfg, value, sizeof(value)) != HDF_SUCCESS) {
HDF_LOGE("%s: i2c addr [%0X] write failed", __func__, value[DRV2605L_ADDR_INDEX]);
return HDF_FAILURE;
return HDF_FAILURE;
}
value[DRV2605L_ADDR_INDEX] = (uint8_t)DRV2605_REG_RTPIN;
value[DRV2605L_VALUE_INDEX] = (uint8_t)&drvData->drv2605lCfgData->vibratorAttr.defaultIntensity;
if (WriteDrv2605l(&drvData->drv2605lCfgData->vibratorBus.i2cCfg, value, sizeof(value)) != HDF_SUCCESS) {
HDF_LOGE("%s: i2c addr [%0X] write failed", __func__, value[DRV2605L_ADDR_INDEX]);
HDF_LOGE("%s: i2c addr [%0X] write failed", __func__, value[DRV2605L_ADDR_INDEX]);
}
value[DRV2605L_ADDR_INDEX] = (uint8_t)DRV2605_REG_LRARESON;
value[DRV2605L_VALUE_INDEX] = (uint8_t)&drvData->drv2605lCfgData->vibratorAttr.defaultFrequency;
if (WriteDrv2605l(&drvData->drv2605lCfgData->vibratorBus.i2cCfg, value, sizeof(value)) != HDF_SUCCESS) {
HDF_LOGE("%s: i2c addr [%0X] write failed", __func__, value[DRV2605L_ADDR_INDEX]);
HDF_LOGE("%s: i2c addr [%0X] write failed", __func__, value[DRV2605L_ADDR_INDEX]);
}
return HDF_SUCCESS;
...
...
@@ -439,7 +450,7 @@ Vibrator驱动模型为上层马达硬件服务层提供稳定的马达控制能
static void SetModulationParameter(int32_t intensity, int32_t frequency)
{
uint8_t value[DRV2605L_VALUE_BUTT];
struct Drv2605lDriverData *drvData = NULL;
struct Drv2605lDriverData *drvData = NULL;
drvData = GetDrv2605lDrvData();
CHECK_VIBRATOR_NULL_PTR_RETURN_VALUE(drvData, HDF_FAILURE);
...
...
@@ -453,7 +464,7 @@ Vibrator驱动模型为上层马达硬件服务层提供稳定的马达控制能
}
} else {
HDF_LOGD("%s: the setting of intensity 0 is not supported and \
will be set as the system default intensity", __func__);
will be set as the system default intensity", __func__);
}
if (frequency != 0) {
...
...
@@ -472,9 +483,9 @@ Vibrator驱动模型为上层马达硬件服务层提供稳定的马达控制能
### 调测验证
驱动开发完成后,在
传感器
单元测试里面开发自测试用例,验证驱动基本功能。测试环境采用开发者自测试平台。
驱动开发完成后,在
马达
单元测试里面开发自测试用例,验证驱动基本功能。测试环境采用开发者自测试平台。
```
```
c++
/* 用例执行前,初始化马达接口实例。 */
void
HdfVibratorTest
::
SetUpTestCase
()
{
...
...
zh-cn/device-dev/driver/figures/Light驱动模型图.png
查看替换文件 @
4deb29fb
浏览文件 @
3de8353a
9.8 KB
|
W:
|
H:
24.8 KB
|
W:
|
H:
2-up
Swipe
Onion skin
编辑
预览
Markdown
is supported
0%
请重试
或
添加新附件
.
添加附件
取消
You are about to add
0
people
to the discussion. Proceed with caution.
先完成此消息的编辑!
取消
想要评论请
注册
或
登录
{kind=link}
{kind=link}