This **eTSFormAbility** sample provides a widget. Users can create, update, and delete widgets on the home screen of their phones or by using their own widget host. This sample also implements widget information persistence by using lightweight data storage.
Sensors in OpenHarmony are an abstraction of underlying hardware-based sensors. Your application can access the underlying sensors via OpenHarmony sensors. Using the APIs provided by OpenHarmony sensors, you can query sensors on your device, subscribe to sensor data, customize algorithms based on sensor data, and develop various sensor-based applications, such as compass, fitness and health, and games applications.
Sensors in OpenHarmony are an abstraction of underlying hardware-based sensors. Your application can access the underlying sensors via the sensors. Using the APIs provided by sensors, you can query sensors on your device, subscribe to sensor data, customize algorithms based on sensor data, and develop various sensor-based applications, such as compass, fitness and health, and games applications.
The sensors are classified into the following categories based on their functions: motion, environment, orientation, light, body, and other categories (such as Hall effect sensors). Each category includes different sensor types. A sensor type may be a single physical sensor or a composite of multiple physical sensors.
A sensor is a device to detect events or changes in an environment and send messages about the events or changes to another device (for example, a CPU). Generally, a sensor is composed of sensitive components and conversion components. Sensors are the cornerstone of the IoT. A unified sensor management framework is required to achieve data sensing at a low latency and low power consumption, thereby keeping up with requirements of "1+8+N" products or business in the Seamless AI Life Strategy. The sensor list is as follows:
| Sensor Type | Sensor Name | Description | Usage |
| SENSOR_TYPE_ACCELEROMETER | Acceleration sensor | Measures the acceleration (including the gravity acceleration) applied to a device on three physical axes (X, Y, and Z), in the unit of m/s<sup>2</sup>.| Detecting the motion status |
| SENSOR_TYPE_ACCELEROMETER_UNCALIBRATED | Uncalibrated acceleration sensor| Measures the uncalibrated acceleration (including the gravity acceleration) applied to a device on three physical axes (X, Y, and Z), in the unit of m/s<sup>2</sup>.| Measuring the acceleration bias estimation |
| SENSOR_TYPE_LINEAR_ACCELERATION | Linear acceleration sensor | Measures the linear acceleration (excluding the gravity acceleration) applied to a device on three physical axes (X, Y, and Z), in the unit of m/s<sup>2</sup>.| Detecting the linear acceleration in each axis |
| SENSOR_TYPE_GRAVITY | Gravity sensor | Measures the gravity acceleration applied to a device on three physical axes (X, Y, and Z), in the unit of m/s<sup>2</sup>.| Measuring the gravity |
| SENSOR_TYPE_GYROSCOPE | Gyroscope sensor | Measures the rotation angular velocity of a device on three physical axes (X, Y, and Z), in the unit of rad/s.| Measuring the rotation angular velocity |
| SENSOR_TYPE_GYROSCOPE_UNCALIBRATED | Uncalibrated gyroscope sensor| Measures the uncalibrated rotation angular velocity of a device on three physical axes (X, Y, and Z), in the unit of rad/s.| Measuring the bias estimation of the rotation angular velocity |
| SENSOR_TYPE_SIGNIFICANT_MOTION | Significant motion sensor | Checks whether a device has a significant motion on three physical axes (X, Y, and Z). The value **0** means that the device does not have a significant motion, and **1** means the opposite.| Detecting significant motions of a device |
| SENSOR_TYPE_PEDOMETER_DETECTION | Pedometer detection sensor | Detects whether a user takes a step. The value can be **0** (the user does not take a step) or **1** (the user takes a step).| Detecting whether a user takes a step |
| SENSOR_TYPE_PEDOMETER | Pedometer sensor | Records the number of steps a user has walked. | Providing the number of steps a user has walked |
| SENSOR_TYPE_AMBIENT_TEMPERATURE | Ambient temperature sensor | Measures the ambient temperature, in the unit of degree Celsius (°C). | Measuring the ambient temperature |
| SENSOR_TYPE_MAGNETIC_FIELD | Magnetic field sensor | Measures the magnetic field on three physical axes (X, Y, and Z), in the unit of μT.| Creating a compass |
| SENSOR_TYPE_MAGNETIC_FIELD_UNCALIBRATED | Uncalibrated magnetic field sensor | Measures the uncalibrated magnetic field on three physical axes (X, Y, and Z), in the unit of μT.| Measuring the magnetic field bias estimation |
| SENSOR_TYPE_HUMIDITY | Humidity sensor | Measures the ambient relative humidity, in a percentage (%). | Monitoring the dew point, absolute humidity, and relative humidity |
| SENSOR_TYPE_BAROMETER | Barometer sensor | Measures the barometric pressure, in the unit of hPa or mbar. | Measuring the barometric pressure |
| SENSOR_TYPE_ORIENTATION | Orientation sensor | Measures the rotation angles of a device on three physical axes (X, Y, and Z), in the unit of rad.| Providing the three orientation angles of the screen |
| SENSOR_TYPE_ROTATION_VECTOR | Rotation vector sensor | Measures the rotation vector of a device. It is a composite sensor that generates data from the acceleration sensor, magnetic field sensor, and gyroscope sensor.| Detecting the orientation of a device in the East, North, Up (ENU) Cartesian coordinate system |
| SENSOR_TYPE_PROXIMITY | Proximity sensor | Measures the distance between a visible object and the device screen. | Measuring the distance between a person and the device during a call |
| SENSOR_TYPE_AMBIENT_LIGHT | Ambient light sensor | Measures the ambient light intensity of a device, in the unit of lux. | Automatically adjusting the screen brightness and checking whether the screen is covered on the top|
| SENSOR_TYPE_HEART_RATE | Heart rate sensor | Measures the heart rate of a user. | Providing users' heart rate data |
| SENSOR_TYPE_WEAR_DETECTION | Wear detection sensor | Checks whether a user is wearing a wearable device. | Detecting wearables |
| SENSOR_TYPE_HALL | Hall effect sensor | Detects a magnetic field around a device. | Smart cover mode of the device |
| Sensor Type | Sensor Name | Description | Usage |
## Working Principles
| -------- | -------- | -------- | -------- |
| SENSOR_TYPE_ACCELEROMETER | Acceleration sensor | Measures the acceleration (including the gravity acceleration) applied to a device on three physical axes (X, Y, and Z), in the unit of m/s<sup>2</sup>. | Detecting the motion status |
| SENSOR_TYPE_ACCELEROMETER_UNCALIBRATED | Uncalibrated acceleration sensor | Measures the uncalibrated acceleration (including the gravity acceleration) applied to a device on three physical axes (X, Y, and Z), in the unit of m/s<sup>2</sup>. | Measuring the acceleration bias estimation |
| SENSOR_TYPE_LINEAR_ACCELERATION | Linear acceleration sensor | Measures the linear acceleration (excluding the gravity acceleration) applied to a device on three physical axes (X, Y, and Z), in the unit of m/s<sup>2</sup>. | Detecting the linear acceleration in each axis |
| SENSOR_TYPE_GRAVITY | Gravity sensor | Measures the gravity acceleration applied to a device on three physical axes (X, Y, and Z), in the unit of m/s<sup>2</sup>. | Measuring the gravity |
| SENSOR_TYPE_GYROSCOPE | Gyroscope sensor | Measures the rotation angular velocity of a device on three physical axes (X, Y, and Z), in the unit of rad/s. | Measuring the rotation angular velocity |
| SENSOR_TYPE_GYROSCOPE_UNCALIBRATED | Uncalibrated gyroscope sensor | Measures the uncalibrated rotation angular velocity of a device on three physical axes (X, Y, and Z), in the unit of rad/s. | Measuring the bias estimation of the rotation angular velocity |
| SENSOR_TYPE_SIGNIFICANT_MOTION | Significant motion sensor | Checks whether a device has a significant motion on three physical axes (X, Y, and Z). The value can be **0** (having no significant motion) or **1** (having a significant motion). | Detecting significant motions of a device |
| SENSOR_TYPE_DROP_DETECTION | Drop detection sensor | Detects the device drop status. The value can be **0** (the device is not dropped) or **1** (the device is dropped). | Detecting whether a device is dropped |
| SENSOR_TYPE_PEDOMETER_DETECTION | Pedometer detection sensor | Detects whether a user takes a step. The value can be **0** (the user does not take a step) or **1** (the user takes a step). | Detecting whether a user takes a step |
| SENSOR_TYPE_PEDOMETER | Pedometer sensor | Records the number of steps a user has walked. | Providing the number of steps a user has walked |
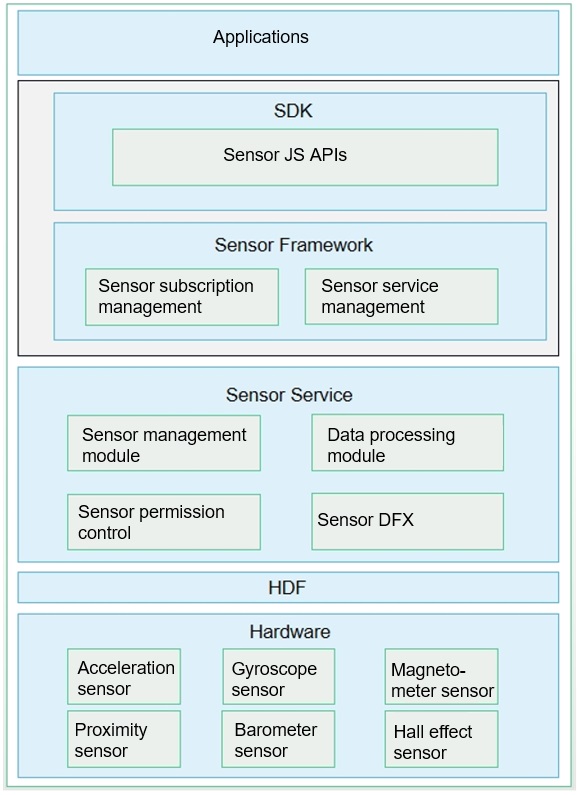
The following modules work cooperatively to implement OpenHarmony sensors: Sensor API, Sensor Framework, Sensor Service, and HDF layer.
| SENSOR_TYPE_AMBIENT_TEMPERATURE | Ambient temperature sensor. | Measures the ambient temperature, in the unit of degree Celsius (°C). | Measuring the ambient temperature |
| SENSOR_TYPE_MAGNETIC_FIELD | Magnetic field sensor | Measures the magnetic field on three physical axes (X, Y, and Z), in the unit of μT. | Creating a compass |
| SENSOR_TYPE_MAGNETIC_FIELD_UNCALIBRATED | Uncalibrated magnetic field sensor | Measures the uncalibrated magnetic field on three physical axes (X, Y, and Z), in the unit of μT. | Measuring the magnetic field bias estimation |
| SENSOR_TYPE_HUMIDITY | Humidity sensor | Measures the ambient relative humidity, in a percentage (%). | Monitoring the dew point, absolute humidity, and relative humidity |
| SENSOR_TYPE_BAROMETER | Barometer sensor | Measures the barometric pressure, in the unit of hPa or mbar. | Measuring the barometric pressure |
| SENSOR_TYPE_SAR | Specific Absorption Rate (SAR) sensor | Measures the SAR, in the unit of W/kg. | Measuring the SAR of electromagnetic waves for a device |
| Sensor Type | Sensor Name | Description | Usage |
| -------- | -------- | -------- | -------- |
| SENSOR_TYPE_6DOF | Degrees of Freedom (DoF) sensor | Measures the forward/backward, up/down, and left/right translational movement of a device on the three axes (X, Y, and Z) in the unit of m or mm as well as the roll, pitch, and yaw rotation angles on the three axes (X, Y, and Z) in the unit of rad. | Positioning an object by detecting its freedom of translational and rotational motions, for example, VR |
| SENSOR_TYPE_SCREEN_ROTATION | Screen rotation sensor | Checks the rotation status of the device screen. | Detecting whether the device screen is rotating |
| SENSOR_TYPE_DEVICE_ORIENTATION | Device orientation sensor | Measures the rotation angles of the device, in the unit of rad. | Measuring the angles that a device has rotated |
| SENSOR_TYPE_ORIENTATION | Orientation sensor | Measures the rotation angles of a device on three physical axes (X, Y, and Z), in the unit of rad. | Providing the three orientation angles of the screen |
| SENSOR_TYPE_ROTATION_VECTOR | Rotation vector sensor | Measures the rotation vector of a device. It is a composite sensor that generates data from the acceleration sensor, magnetic field sensor, and gyroscope sensor. | Detecting the orientation of a device in the East, North, Up (ENU) Cartesian coordinate system |
| SENSOR_TYPE_GAME_ROTATION_VECTOR<br/>SENSOR_TYPE_GEOMAGNETIC_ROTATION_VECTOR | Game rotation vector sensor<br/>Geomagnetic rotation vector sensor | Measures the game rotation vector of a device. It is a composite sensor that generates data from the acceleration sensor and gyroscope sensor.<br/>Measures the geomagnetic rotation vector of a device. It is a composite sensor that generates data from the acceleration sensor and magnetic field sensor. | Applied in games<br/>Measuring the geomagnetic rotation vector |
| Sensor Type | Sensor Name | Description | Usage |
| -------- | -------- | -------- | -------- |
| SENSOR_TYPE_PROXIMITY | Proximity sensor | Measures the distance between a visible object and the device screen. | Measuring the distance between a person and the device during a call |
| SENSOR_TYPE_TOF | Time of flight (ToF) sensor | Measures the time required for light to travel a distance in the medium. | Facial recognition |
| SENSOR_TYPE_AMBIENT_LIGHT | Ambient light sensor | Measures the ambient light intensity of a device, in the unit of lux. | Automatically adjusting the screen brightness and checking whether the screen is covered on the top |
| SENSOR_TYPE_COLOR_TEMPERATURE | Color temperature sensor | Measures the ambient color temperature. | Image processing on the device |
| SENSOR_TYPE_COLOR_RGB | RGB color sensor | Measures the ambient RGB color values. | Color detection implemented by the reflectance of RGB colors |
| SENSOR_TYPE_COLOR_XYZ | XYZ color sensor | Measures the ambient XYZ color values. | Identifying true-color spots to reproduce more natural colors |
**Table5** Body - ohos.sensor.agent.CategoryBodyAgent
| Sensor Type | Sensor Name | Description | Usage |
| -------- | -------- | -------- | -------- |
| SENSOR_TYPE_HEART_RATE | Heart rate sensor | Measures the heart rate of a user. | Providing users' heart rate data |
| SENSOR_TYPE_WEAR_DETECTION | Wear detection sensor | Checks whether a user is wearing a wearable device. | Detecting wearables |
**Table6** Others
| Sensor Type | Sensor Name | Description | Usage |
| -------- | -------- | -------- | -------- |
| SENSOR_TYPE_HALL | Hall effect sensor | Detects a magnetic field around a device. | Smart cover mode of the device |
| SENSOR_TYPE_GRIP_DETECTOR | Grip detection sensor | Detects grip force applied on a device. | Detecting whether the device is gripped on its sides |
| SENSOR_TYPE_MAGNET_BRACKET | Magnet bracket sensor | Checks whether a device is magnetized. | Detecting an in-vehicle or indoor device |
| SENSOR_TYPE_PRESSURE_DETECTOR | Pressure detection sensor | Detects pressure force applied on a device. | Detecting pressure on the top of the device |
## How a Service Is Shared Using Huawei Share
The following modules work cooperatively to implement OpenHarmony sensors: Sensor API, Sensor Framework, Sensor Service, and HD_IDL.
**Figure1** Working principles for OpenHarmony sensors
- Sensor API: provides APIs for performing basic operations on sensors, including querying the sensor list, subscribing to or unsubscribing from sensor data, and executing control commands. This module makes application development simpler.
- Sensor API: provides APIs for performing basic operations on sensors, including querying the sensor list, subscribing to or unsubscribing from sensor data, and executing control commands. This module makes application development simpler.
...
@@ -90,22 +45,22 @@ The following modules work cooperatively to implement OpenHarmony sensors: Senso
...
@@ -90,22 +45,22 @@ The following modules work cooperatively to implement OpenHarmony sensors: Senso
- Sensor Service: interacts with the HD_IDL module to receive, parse, and distribute data, manages foreground and background policies and sensors of a device, and controls sensor permissions.
- Sensor Service: interacts with the HD_IDL module to receive, parse, and distribute data, manages foreground and background policies and sensors of a device, and controls sensor permissions.
- HD_IDL: selects proper policies based on the hardware first in first out (FIFO) and frequency, and adapts to different devices.
- HDF layer: selects proper policies based on the hardware first in first out (FIFO) and frequency, and adapts to different devices.
## Limitations and Constraints
## Constraints
To obtain data of the following sensors, you must claim the required permissions.
1.To obtain data of the following sensors, you must claim the required permissions.
| Acceleration sensor, uncalibrated acceleration sensor, and linear acceleration sensor| ohos.permission.ACCELEROMETER | system_grant | Allows your application to subscribe to data of these acceleration-related sensors in the motion category.|
| Gyroscope sensor and uncalibrated gyroscope sensor | ohos.permission.GYROSCOPE | system_grant | Allows an application to subscribe to data of the gyroscope-related sensors in the motion category.|
| Pedometer sensor | ohos.permission.ACTIVITY_MOTION | user_grant | Allows an application to subscribe to the motion status. |
| Heart rate sensor | ohos.permission.READ_HEALTH_DATA | user_grant | Allows an application to read health data. |
| Acceleration sensor, uncalibrated acceleration sensor, and linear acceleration sensor | ohos.permission.ACCELEROMETER | system_grant | Allows your application to subscribe to data of these acceleration-related sensors in the motion category. |
| Gyroscope sensor and uncalibrated gyroscope sensor | ohos.permission.GYROSCOPE | system_grant | Allows your application to subscribe to data of these gyroscope-related sensors in the motion category. |
| Pedometer sensor | ohos.permission.ACTIVITY_MOTION | user_grant | Allows your application to subscribe to the motion status. |
| Heart rate sensor | ohos.permission.READ_HEALTH_DATA | user_grant | Allows your application to read health data. |
The APIs for subscribing to and unsubscribing from sensor data work in pairs. If you do not need sensor data, call the unsubscription API to stop sensor data reporting.
2.The APIs for subscribing to and unsubscribing from sensor data work in pairs. If you do not need sensor data, call the unsubscription API to stop sensor data reporting.
| ohos.vibrator | vibrate(duration: number): Promise<void> | Triggers vibration with the specified duration. This API uses a promise to return the result.|
| ohos.vibrator | vibrate(duration: number, callback?: AsyncCallback<void>): void | Triggers vibration with the specified duration. This API uses a callback to return the result.|
| ohos.vibrator | vibrate(effectId: EffectId): Promise<void> | Triggers vibration with the specified effect. This API uses a promise to return the result.|
| ohos.vibrator | vibrate(effectId: EffectId, callback?: AsyncCallback<void>): void | Triggers vibration with the specified effect. This API uses a callback to return the result.|
| ohos.vibrator | stop(stopMode: VibratorStopMode, callback?: AsyncCallback<void>): void | Stops vibration. This API uses a callback to return the result.|
## How to Develop
## How to Develop
1. Declare the permissions required for controlling vibrators on the hardware device in the **config.json** file.
1. Declare the permissions required for controlling vibrators on the hardware device in the **config.json** file.
```
```
"reqPermissions":[
"reqPermissions":[
{
{
...
@@ -58,26 +58,26 @@ You can set different vibration effects as needed, for example, customizing vibr
...
@@ -58,26 +58,26 @@ You can set different vibration effects as needed, for example, customizing vibr
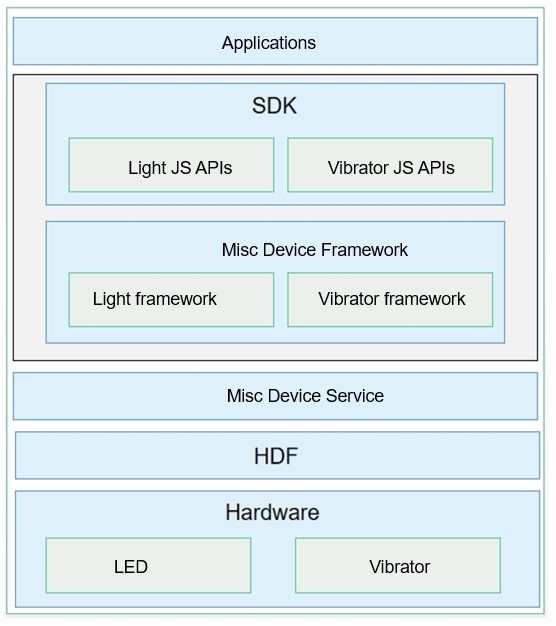
- Vibrator API: provides basic vibrator APIs, including the APIs for querying the vibrator list, querying the vibrator by effect, and triggering and stopping vibration.
- Vibrator API: provides basic vibrator APIs, including the APIs for querying the vibrator list, querying the vibrator by effect, and triggering and stopping vibration.
...
@@ -17,9 +18,9 @@ The vibrator is a Misc device that consists of four modules: Vibrator API, Vibra
...
@@ -17,9 +18,9 @@ The vibrator is a Misc device that consists of four modules: Vibrator API, Vibra
- Vibrator Service: manages services of vibrators.
- Vibrator Service: manages services of vibrators.
- HD_IDL: adapts to different devices.
- HDF layer: adapts to different devices.
## Constraints
## Constraints
When using a vibrator, you need to declare and obtain the **ohos.permission.VIBRATE** permission first so that you can control the vibration effect.
When using a vibrator, you must declare the **ohos.permission.VIBRATE** permission before you can control the vibration effect. The sensitivity level of this permission is **system_grant**.
@@ -20,9 +20,22 @@ Note: Video playback requires hardware capabilities such as display, audio, and
...
@@ -20,9 +20,22 @@ Note: Video playback requires hardware capabilities such as display, audio, and
2. The third-party application transfers the surface ID to the VideoPlayer JS.
2. The third-party application transfers the surface ID to the VideoPlayer JS.
3. The media service flushes the frame data to the surface buffer.
3. The media service flushes the frame data to the surface buffer.
## Compatibility
You are advised to use the mainstream playback formats and resolutions, rather than custom or abnormal streams to avoid playback failure, frame freezing, and artifacts. The system is not affected by incompatibility issues. If such an error occurs, you can exit stream playback mode.
The table below lists the mainstream playback formats and resolutions.
| Video Container Specification| Specification Description | Resolution |
@@ -39,7 +39,7 @@ This document provides a Page ability instance with two pages. For more informat
...
@@ -39,7 +39,7 @@ This document provides a Page ability instance with two pages. For more informat
## Tool Preparation
## Tool Preparation
1. Install the latest version of [DevEco Studio](https://developer.harmonyos.com/cn/develop/deveco-studio#download_beta).
1. Install the latest version of [DevEco Studio](https://developer.harmonyos.com/cn/develop/deveco-studio#download_beta_openharmony).
2. Install DevEco Studio and configure the development environment. For details, see [Configuring the OpenHarmony SDK](https://developer.harmonyos.com/en/docs/documentation/doc-guides/ohos-setting-up-environment-0000001263160443).
2. Install DevEco Studio and configure the development environment. For details, see [Configuring the OpenHarmony SDK](https://developer.harmonyos.com/en/docs/documentation/doc-guides/ohos-setting-up-environment-0000001263160443).
> To use eTS, your DevEco Studio must be V3.0.0.601 Beta1 or later.
> To use eTS, your DevEco Studio must be V3.0.0.601 Beta1 or later.
>
>
> For best possible results, use [DevEco Studio V3.0.0.900 Beta3](https://developer.harmonyos.com/cn/develop/deveco-studio#download_beta) for your development.
> For best possible results, use [DevEco Studio V3.0.0.900 Beta3](https://developer.harmonyos.com/cn/develop/deveco-studio#download_beta_openharmony) for your development.
> This feature will be available in DevEco Studio V2.2 Beta1 and later versions.
> This feature will be available in DevEco Studio V2.2 Beta1 and later versions.
>
>
> For best possible results, use [DevEco Studio V3.0.0.900 Beta3](https://developer.harmonyos.com/cn/develop/deveco-studio#download_beta) for your development.
> For best possible results, use [DevEco Studio V3.0.0.900 Beta3](https://developer.harmonyos.com/cn/develop/deveco-studio#download_beta_openharmony) for your development.
On the OpenHarmony low-code development pages, you can design your app UI in an efficient, intuitive manner, with a wide array of UI editing features complying with [JS Development Specifications](../reference/apis).
On the OpenHarmony low-code development pages, you can design your app UI in an efficient, intuitive manner, with a wide array of UI editing features complying with [JS Development Specifications](../reference/apis).
> For best possible results, use [DevEco Studio V3.0.0.900 Beta3](https://developer.harmonyos.com/cn/develop/deveco-studio#download_beta) for your development.
> For best possible results, use [DevEco Studio V3.0.0.900 Beta3](https://developer.harmonyos.com/cn/develop/deveco-studio#download_beta_openharmony) for your development.
> The initial APIs of this module are supported since API version 8. Newly added APIs will be marked with a superscript to indicate their earliest API version.
| type | string | Yes| Event type. The value is **notify**.|
| callback | Callback<number> | No| Callback used to return the field strength state. If this parameter is not specified, all callbacks associated with the specified event will be unregistered.|
Deletes a widget. This API uses a promise to return the result. After this API is called, the application can no longer use the widget, and the Widget Manager will not retain the widget information.
Deletes a widget. This API uses a promise to return the result. After this API is called, the application can no longer use the widget, and the Widget Manager will not retain the widget information.
**System capability**:
SystemCapability.Ability.Form
**Parameters**
**Parameters**
| Name| Type | Mandatory| Description |
| Name| Type | Mandatory| Description |
| ------ | ------ | ---- | ------- |
| ------ | ------ | ---- | ------- |
| formId | string | Yes | ID of a widget.|
| formId | string | Yes | ID of a widget.|
**System capability**:
**Return value**
SystemCapability.Ability.Form
| Type| Description|
| -------- | -------- |
| Promise<void> | Promise used to return the result indicating whether the API is successfully called.|
Instructs the widget framework to make a widget visible. This API uses a promise to return the result. After this API is called, **onVisibilityChange** is invoked to notify the widget provider.
Instructs the widget framework to make a widget visible. This API uses a promise to return the result. After this API is called, **onVisibilityChange** is invoked to notify the widget provider.
**System capability**:
SystemCapability.Ability.Form
**Parameters**
**Parameters**
| Name| Type | Mandatory| Description |
| Name| Type | Mandatory| Description |
| ------ | ------ | ---- | ------- |
| ------ | ------ | ---- | ------- |
| formId | string | Yes | ID of a widget.|
| formId | string | Yes | ID of a widget.|
**System capability**:
**Return value**
SystemCapability.Ability.Form
| Type| Description|
| -------- | -------- |
| Promise<void> | Promise used to return the result indicating whether the API is successfully called.|
Instructs the widget framework to make a widget invisible. This API uses a promise to return the result. After this API is called, **onVisibilityChange** is invoked to notify the widget provider.
Instructs the widget framework to make a widget invisible. This API uses a promise to return the result. After this API is called, **onVisibilityChange** is invoked to notify the widget provider.
**System capability**:
SystemCapability.Ability.Form
**Parameters**
**Parameters**
| Name| Type | Mandatory| Description |
| Name| Type | Mandatory| Description |
| ------ | ------ | ---- | ------- |
| ------ | ------ | ---- | ------- |
| formId | string | Yes | ID of a widget.|
| formId | string | Yes | ID of a widget.|
**System capability**:
**Return value**
SystemCapability.Ability.Form
| Type| Description|
| -------- | -------- |
| Promise<void> | Promise used to return the result indicating whether the API is successfully called.|
Instructs the widget framework to make a widget to be updatable. This API uses a promise to return the result. After this API is called, the widget is in the enabled state and can receive updates from the widget provider.
Instructs the widget framework to make a widget to be updatable. This API uses a promise to return the result. After this API is called, the widget is in the enabled state and can receive updates from the widget provider.
**System capability**:
SystemCapability.Ability.Form
**Parameters**
**Parameters**
| Name| Type | Mandatory| Description |
| Name| Type | Mandatory| Description |
| ------ | ------ | ---- | ------- |
| ------ | ------ | ---- | ------- |
| formId | string | Yes | ID of a widget.|
| formId | string | Yes | ID of a widget.|
**System capability**:
**Return value**
SystemCapability.Ability.Form
| Type| Description|
| -------- | -------- |
| Promise<void> | Promise used to return the result indicating whether the API is successfully called.|
Instructs the widget framework to make a widget not to be updatable. This API uses a promise to return the result. After this API is called, the widget is in the disabled state and cannot receive updates from the widget provider.
Instructs the widget framework to make a widget not to be updatable. This API uses a promise to return the result. After this API is called, the widget is in the disabled state and cannot receive updates from the widget provider.
**System capability**:
SystemCapability.Ability.Form
**Parameters**
**Parameters**
| Name| Type | Mandatory| Description |
| Name| Type | Mandatory| Description |
| ------ | ------ | ---- | ------- |
| ------ | ------ | ---- | ------- |
| formId | string | Yes | ID of a widget.|
| formId | string | Yes | ID of a widget.|
**System capability**:
**Return value**
SystemCapability.Ability.Form
| Type| Description|
| -------- | -------- |
| Promise<void> | Promise used to return the result indicating whether the API is successfully called.|
**Example**
**Example**
...
@@ -509,6 +556,12 @@ Checks whether the system is ready. This API uses a promise to return the result
...
@@ -509,6 +556,12 @@ Checks whether the system is ready. This API uses a promise to return the result
SystemCapability.Ability.Form
SystemCapability.Ability.Form
**Return value**
| Type| Description|
| -------- | -------- |
| Promise<void> | Promise used to return the result indicating whether the API is successfully called.|
Unregisters a callback with the corresponding query condition by using the handle, so that no callback is triggered when the media attributes change.
- Parameters
| Name| Type| Mandatory| Description|
| -------- | -------- | -------- | -------- |
| type | boolean | Yes| Must enter the string **change**.|
| callback | Callback<MediaQueryResult> | No| Callback to be unregistered. If the default value is used, all callbacks of the handle are unregistered.|
- Example
```
import mediaquery from '@ohos.mediaquery'
listener = mediaquery.matchMediaSync('(orientation: landscape)'); // Listen for landscape events.
A digit-to-analog converter (DAC) is a device that converts a digital signal into an analog signal in electronics.
The DAC APIs provide a set of methods for DAC data transfer, including:
- Opening or closing a DAC device
- Setting the target digital-to-analog (DA) value
### Basic Concepts
The DAC module provides the output channel for the process control computer system. It connects to the executor to implement automatic control of the production process. It is also an important module in the analog-to-digital converter using feedback technologies.
- Resolution
The number of binary bits that can be converted by a DAC. A greater number of bits indicates a higher resolution.
- Conversion precision
Difference between the actual output value of the DAC and the theoretical value when the maximum value is added to the input end. The conversion precision of a DAC converter varies depending on the structure of the chip integrated on the DAC and the interface circuit configuration. The ideal conversion precision value should be as small as possible. To achieve optimal DAC conversion precision, the DAC must have high resolution. In addition, errors in the devices or power supply of the interface circuits will affect the conversion precision. When the error exceeds a certain degree, a DAC conversion error will be caused.
- Conversion speed
The conversion speed is determined by the setup time. The setup time is the period from the time the input suddenly changes from all 0s to all 1s to the time the output voltage remains within the FSR ± ½LSB (or FSR ± x%FSR). It is the maximum response time of the DAC, and hence used to measure the conversion speed.
The full scale range (FSR) is the maximum range of the output signal amplitude of a DAC. Different DACs have different FSRs, which can be limited by positive and negative currents or voltages.
The least significant byte (LSB) refers to bit 0 (the least significant bit) in a binary number.
### Working Principles
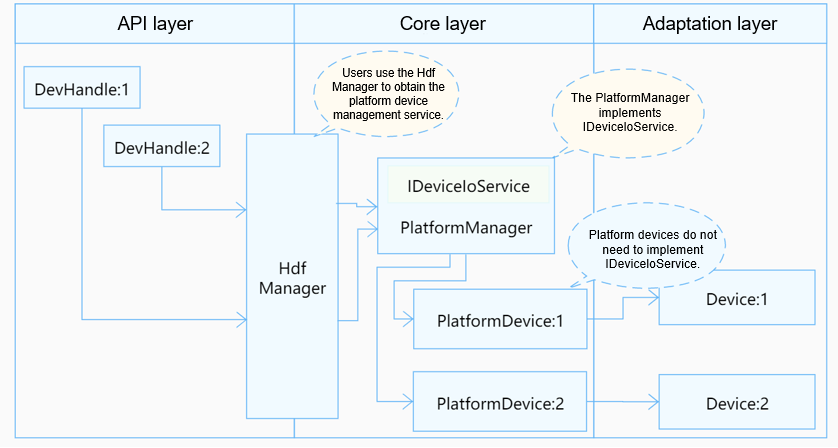
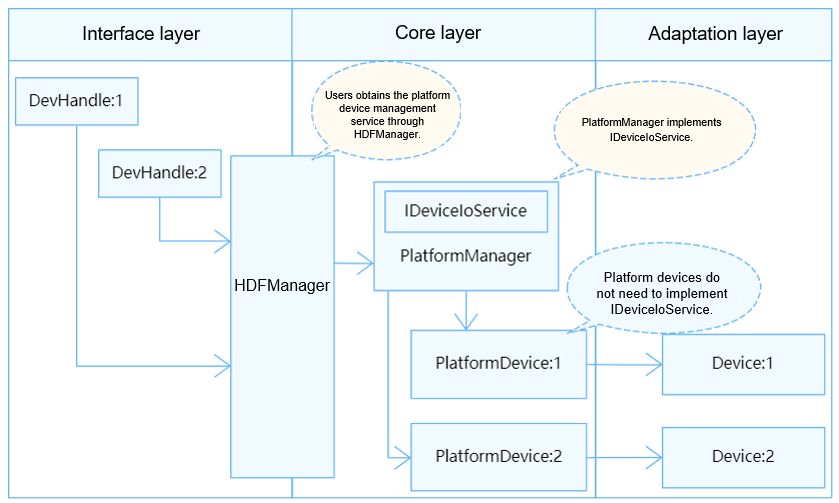
In the Hardware Driver Foundation (HDF), the DAC module uses the unified service mode for API adaptation. In this mode, a device service is used as the DAC manager to handle access requests from the devices of the same type in a unified manner. The unified service mode applies to the scenario where there are many device objects of the same type. If the independent service mode is used, more device nodes need to be configured and memory resources will be consumed by services. The figure below shows the unified service mode.
The DAC module is divided into the following layers:
- The interface layer provides APIs for opening or closing a device and writing data.
- The core layer provides the capabilities of binding, initializing, and releasing devices.
- The adaptation layer implements other functions.
NOTE<br/>The core layer can call the functions of the interface layer and uses the hook to call functions of the adaptation layer. In this way, the adaptation layer can indirectly call the functions of the interface layer, but the interface layer cannot call the functions of the adaptation layer.
Currently, the DAC module supports only the kernels (LiteOS) of mini and small systems.
## Development Guidelines
### When to Use
The DAC module converts digital signals into analog signals in the form of current, voltage, or charge. It is mainly used in audio devices. Audio players and headsets use the DAC module as the digital-to-analog conversion channels.
### Available APIs
The table below describes the APIs of the DAC module. For more details, see API Reference.
To streamline your device development process, OpenHarmony provides the useful tools listed below.
**Table 1** Tools for device development
| Tool | Description | Related Resources|
| ---- | ------ | ------ |
| DevEco Device Tool | A one-stop integrated development environment (IDE) provided for developers of OpenHarmony-powered smart devices. It allows on-demand component customization, as well as code editing, compilation, burning, and debugging. The tool supports C and C++ languages and can be installed in Visual Studio Code as a plug-in.| [HUAWEI DevEco Device Tool User Guide](https://device.harmonyos.com/en/docs/documentation/guide/service_introduction-0000001050166905)|
| Docker | A containerization platform used to build and containerize applications. The Docker environments in OpenHarmony encapsulate compilation toolchains for different OpenHarmony variants, so you can start your building straightaway without having to install the compilation toolchain on your own.| [Docker Environment](gettools-acquire.md)|
||**hpm remove** or **hpm rm bundlename**| Uninstalls dependent HPM Parts.|
| Viewing information| **hpm list** or **hpm ls**| Displays the dependency tree of the HPM part.|
| Viewing information| **hpm list** or **hpm ls**| Displays the dependency tree of the HPM part.|
| hpm dependencies | Generates the dependency relationship data of the HPM Part. (This command is also integrated in the **hpm ui** command. After you run the hpm ui command, a hpm UI is displayed with the dependencies.)|
|| hpm dependencies | Generates the dependency relationship data of the HPM Part. (This command is also integrated in the **hpm ui** command. After you run the hpm ui command, a hpm UI is displayed with the dependencies.)|
| Searching for HPM Parts| hpm search name | Searches for HPM Parts. **--json** is used to specify the search result in JSON format, and **-type** is used to set the target type, which can be **part**, **distribution**, or **code-segment**.|
| Searching for HPM Parts| hpm search name | Searches for HPM Parts. **--json** is used to specify the search result in JSON format, and **-type** is used to set the target type, which can be **part**, **distribution**, or **code-segment**.|
| Setting HPM configuration items| hpm config set key value | Sets configuration items, such as the server address and network proxy.|
| Setting HPM configuration items| hpm config set key value | Sets configuration items, such as the server address and network proxy.|
| Updating HPM Part versions| hpm update | Updates the versions of dependent HPM Parts.|
| Updating HPM Part versions| hpm update | Updates the versions of dependent HPM Parts.|
| hpm check-update | Checks whether version updates are available to dependent HPM Parts.|
|| hpm check-update | Checks whether version updates are available to dependent HPM Parts.|
| Building| hpm build | Builds an HPM Part.|
| Building| hpm build | Builds an HPM Part.|
| hpm dist | Builds a distribution. The build depends on the **dist** script in **scripts** of **bundle.json**.|
|| hpm dist | Builds a distribution. The build depends on the **dist** script in **scripts** of **bundle.json**.|
| Packing | hpm pack | Packs dependencies of local HPM Parts.|
| Packing | hpm pack | Packs dependencies of local HPM Parts.|
| Burning| hpm run flash | Burns the firmware. The firmware burning depends on the **flash** script in **scripts** of **bundle.json**.|
| Burning| hpm run flash | Burns the firmware. The firmware burning depends on the **flash** script in **scripts** of **bundle.json**.|
| Publishing| hpm publish | Publishes an HPM Part, which must be unique in the repository and has a unique version. (An account is required for login.)|
| Publishing| hpm publish | Publishes an HPM Part, which must be unique in the repository and has a unique version. (An account is required for login.)|
...
@@ -242,7 +242,7 @@ HPM Part dependencies (including indirect dependencies) can be displayed by runn
...
@@ -242,7 +242,7 @@ HPM Part dependencies (including indirect dependencies) can be displayed by runn
Lightweight CPU isolation enables dynamic CPU isolation based on the system load and user configuration. The kernel migrates the tasks and interrupts from the isolated CPU to other CPUs for execution. The isolated CPU enters the idle state, which reduces the power consumption. In addition, user-mode configuration and query APIs are provided for better system optimization.
## Configuration
### Enabling Lightweight CPU Isolation
Enable related configuration items and dependencies.
To enable lightweight CPU isolation, you need to enable the corresponding configuration items and dependencies during kernel compilation. The related configuration items are as follows:
```
CONFIG_CPU_ISOLATION_OPT=y
CONFIG_SCHED_CORE_CTRL=y
```
Enable the following dependencies:
```
CONFIG_SMP=y
CONFIG_SCHED_WALT=y
```
## Available APIs
APIs are provided to set the number of isolated CPU cores and record the current status. Configurations can be performed based on CPU clusters. These APIs are located in the first CPU device directory of each CPU cluster, for example, `/sys/devices/system/cpu/cpu0/core_ctl`.
The Related Thread Group (RTG) provides optimized scheduling of a group of important threads. The load of an RTG can be collected and predicted separately and the preferred CPU cluster can be set to allow the important threads to run on the optimal CPU and the kernel to select a proper CPU frequency based on the group loads.
## Configuration
### Enabling RTG
To enable RTG, you need to enable the related configuration items and dependencies during kernel compilation. The related configuration items are as follows:
```
CONFIG_SCHED_RTG=y
CONFIG_SCHED_RTG_DEBUG=y
CONFIG_SCHED_RTG_FRAME=y
CONFIG_SCHED_RTG_RT_THREAD_LIMIT=y
```
Enable the following dependencies:
```
CONFIG_SCHED_WALT=y
```
### Adding a Process or Thread to an RTG
By default, 20 RTGs are created in the kernel. The group with ID of 1 is reserved and cannot be added with any process or thread.
```Bash
// Add a process to an RTG.
echo 2 > /proc/<pid>/sched_group_id
// Remove a process from an RTG. The group with ID of 0 is not an RTG.
echo 0 > /proc/<pid>/sched_group_id
```
### Obtaining RTG Information
The RTG information includes group ID, preferred CPU cluster ID, and thread information.
```Bash
cat /proc/sched_rtg_debug
// The following information is displayed:
RTG_ID : 2 // RTG ID.
RTG_INTERVAL : UPDATE:8ms\#INVALID:4294ms // CPU frequency modulation interval and valid load duration.
RTG_CLUSTER : -1 // CPU cluster ID. The value **-1** means that the preferred cluster is not set.
RTG_THREADS: 0/1 // Total number of threads in the group.
STATE COMM PID PRIO CPU // Thread information, including the status, name, PID, priority, and CPU ID.
> 为确保运行效果,本文以使用**DevEco Studio V3.0.0.900 Beta3**版本为例,点击[此处](https://developer.harmonyos.com/cn/develop/deveco-studio#download_beta)获取下载链接。
> 为确保运行效果,本文以使用**DevEco Studio V3.0.0.900 Beta3**版本为例,点击[此处](https://developer.harmonyos.com/cn/develop/deveco-studio#download_beta_openharmony)获取下载链接。
> 为确保运行效果,本文以使用**DevEco Studio V3.0.0.900 Beta3**版本为例,点击[此处](https://developer.harmonyos.com/cn/develop/deveco-studio#download_beta)获取下载链接。
> 为确保运行效果,本文以使用**DevEco Studio V3.0.0.900 Beta3**版本为例,点击[此处](https://developer.harmonyos.com/cn/develop/deveco-studio#download_beta_openharmony)获取下载链接。
> 为确保运行效果,本文以使用**DevEco Studio V3.0.0.900 Beta3**版本为例,点击[此处](https://developer.harmonyos.com/cn/develop/deveco-studio#download_beta)获取下载链接。
> 为确保运行效果,本文以使用**DevEco Studio V3.0.0.900 Beta3**版本为例,点击[此处](https://developer.harmonyos.com/cn/develop/deveco-studio#download_beta_openharmony)获取下载链接。
> - 从API Version 6开始,该接口不再维护,可以使用接口['@ohos.data.storage'](js-apis-data-storage.md)。在API Version 9后,推荐使用新接口 ['@ohos.data.preferences'](js-apis-data-preferences.md)。
> - 从API Version 6开始,该接口不再维护,可以使用接口[`@ohos.data.storage`](js-apis-data-storage.md)。在API Version 9后,推荐使用新接口 [`@ohos.data.preferences`](js-apis-data-preferences.md)。
>
>
> - 本模块首批接口从API version 3开始支持。后续版本的新增接口,采用上角标单独标记接口的起始版本。
> - 本模块首批接口从API version 3开始支持。后续版本的新增接口,采用上角标单独标记接口的起始版本。
{kind=link}
{kind=link}
{kind=link}

{kind=link}
{kind=link}