Skip to content
体验新版
项目
组织
正在加载...
登录
切换导航
打开侧边栏
逝缘~
rt-thread
提交
a8581ac8
R
rt-thread
项目概览
逝缘~
/
rt-thread
与 Fork 源项目一致
Fork自
RT-Thread / rt-thread
通知
1
Star
0
Fork
0
代码
文件
提交
分支
Tags
贡献者
分支图
Diff
Issue
0
列表
看板
标记
里程碑
合并请求
0
DevOps
流水线
流水线任务
计划
Wiki
0
Wiki
分析
仓库
DevOps
项目成员
Pages
R
rt-thread
项目概览
项目概览
详情
发布
仓库
仓库
文件
提交
分支
标签
贡献者
分支图
比较
Issue
0
Issue
0
列表
看板
标记
里程碑
合并请求
0
合并请求
0
Pages
DevOps
DevOps
流水线
流水线任务
计划
分析
分析
仓库分析
DevOps
Wiki
0
Wiki
成员
成员
收起侧边栏
关闭侧边栏
动态
分支图
创建新Issue
流水线任务
提交
Issue看板
前往新版Gitcode,体验更适合开发者的 AI 搜索 >>
未验证
提交
a8581ac8
编写于
8月 05, 2022
作者:
L
liYang~
提交者:
GitHub
8月 05, 2022
浏览文件
操作
浏览文件
下载
电子邮件补丁
差异文件
[Ardunio]为stm32f103-blue-pill对接RTdunio软件包 (#6231)
* 对接RTdunio
上级
76885ca9
变更
13
隐藏空白更改
内联
并排
Showing
13 changed file
with
295 addition
and
25 deletion
+295
-25
bsp/stm32/stm32f072-st-nucleo/applications/arduino_main.cpp
bsp/stm32/stm32f072-st-nucleo/applications/arduino_main.cpp
+2
-1
bsp/stm32/stm32f103-blue-pill/applications/SConscript
bsp/stm32/stm32f103-blue-pill/applications/SConscript
+3
-0
bsp/stm32/stm32f103-blue-pill/applications/arduino_main.cpp
bsp/stm32/stm32f103-blue-pill/applications/arduino_main.cpp
+24
-0
bsp/stm32/stm32f103-blue-pill/applications/arduino_pinout/README.md
...stm32f103-blue-pill/applications/arduino_pinout/README.md
+74
-0
bsp/stm32/stm32f103-blue-pill/applications/arduino_pinout/SConscript
...tm32f103-blue-pill/applications/arduino_pinout/SConscript
+9
-0
bsp/stm32/stm32f103-blue-pill/applications/arduino_pinout/blue-pill-f103-pinout.png
...ill/applications/arduino_pinout/blue-pill-f103-pinout.png
+0
-0
bsp/stm32/stm32f103-blue-pill/applications/arduino_pinout/pins_arduino.c
...f103-blue-pill/applications/arduino_pinout/pins_arduino.c
+61
-0
bsp/stm32/stm32f103-blue-pill/applications/arduino_pinout/pins_arduino.h
...f103-blue-pill/applications/arduino_pinout/pins_arduino.h
+60
-0
bsp/stm32/stm32f103-blue-pill/board/CubeMX_Config/CubeMX_Config.ioc
...stm32f103-blue-pill/board/CubeMX_Config/CubeMX_Config.ioc
+26
-22
bsp/stm32/stm32f103-blue-pill/board/CubeMX_Config/Src/stm32f1xx_hal_msp.c
...103-blue-pill/board/CubeMX_Config/Src/stm32f1xx_hal_msp.c
+7
-0
bsp/stm32/stm32f103-blue-pill/board/Kconfig
bsp/stm32/stm32f103-blue-pill/board/Kconfig
+26
-0
bsp/stm32/stm32f401-st-nucleo/applications/arduino_main.cpp
bsp/stm32/stm32f401-st-nucleo/applications/arduino_main.cpp
+2
-1
bsp/stm32/stm32f401-st-nucleo/board/Kconfig
bsp/stm32/stm32f401-st-nucleo/board/Kconfig
+1
-1
未找到文件。
bsp/stm32/stm32f072-st-nucleo/applications/arduino_main.cpp
浏览文件 @
a8581ac8
...
...
@@ -13,11 +13,12 @@
void
setup
(
void
)
{
/* put your setup code here, to run once: */
Serial
.
begin
();
}
void
loop
(
void
)
{
/* put your main code here, to run repeatedly: */
Serial
.
println
(
"Hello Arduino!
\n
"
);
Serial
.
println
(
"Hello Arduino!"
);
delay
(
800
);
}
bsp/stm32/stm32f103-blue-pill/applications/SConscript
浏览文件 @
a8581ac8
...
...
@@ -5,6 +5,9 @@ cwd = GetCurrentDir()
src
=
Glob
(
'*.c'
)
CPPPATH
=
[
cwd
]
if
GetDepend
([
'PKG_USING_RTDUINO'
])
and
not
GetDepend
([
'RTDUINO_NO_SETUP_LOOP'
]):
src
+=
[
'arduino_main.cpp'
]
group
=
DefineGroup
(
'Applications'
,
src
,
depend
=
[
''
],
CPPPATH
=
CPPPATH
)
list
=
os
.
listdir
(
cwd
)
...
...
bsp/stm32/stm32f103-blue-pill/applications/arduino_main.cpp
0 → 100644
浏览文件 @
a8581ac8
/*
* Copyright (c) 2006-2022, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2022-08-05 liYony first version
*/
#include <Arduino.h>
void
setup
(
void
)
{
/* put your setup code here, to run once: */
Serial
.
begin
();
}
void
loop
(
void
)
{
/* put your main code here, to run repeatedly: */
Serial
.
println
(
"Hello Arduino!"
);
delay
(
800
);
}
bsp/stm32/stm32f103-blue-pill/applications/arduino_pinout/README.md
0 → 100644
浏览文件 @
a8581ac8
# STM32F103 Blue-Pill开发板的Arduino生态兼容说明
## 1 RTduino - RT-Thread的Arduino生态兼容层
STM32F103 Blue-Pill开发板已经完整适配了
[
RTduino软件包
](
https://github.com/RTduino/RTduino
)
,即RT-Thread的Arduino生态兼容层。用户可以按照Arduino的编程习惯来操作该BSP,并且可以使用大量Arduino社区丰富的库,是对RT-Thread生态的极大增强。更多信息,请参见
[
RTduino软件包说明文档
](
https://github.com/RTduino/RTduino
)
。
### 1.1 如何开启针对本BSP的Arduino生态兼容层
Env 工具下敲入 menuconfig 命令,或者 RT-Thread Studio IDE 下选择 RT-Thread Settings:
```
Kconfig
Hardware Drivers Config --->
Onboard Peripheral Drivers --->
[*] Support Arduino
```
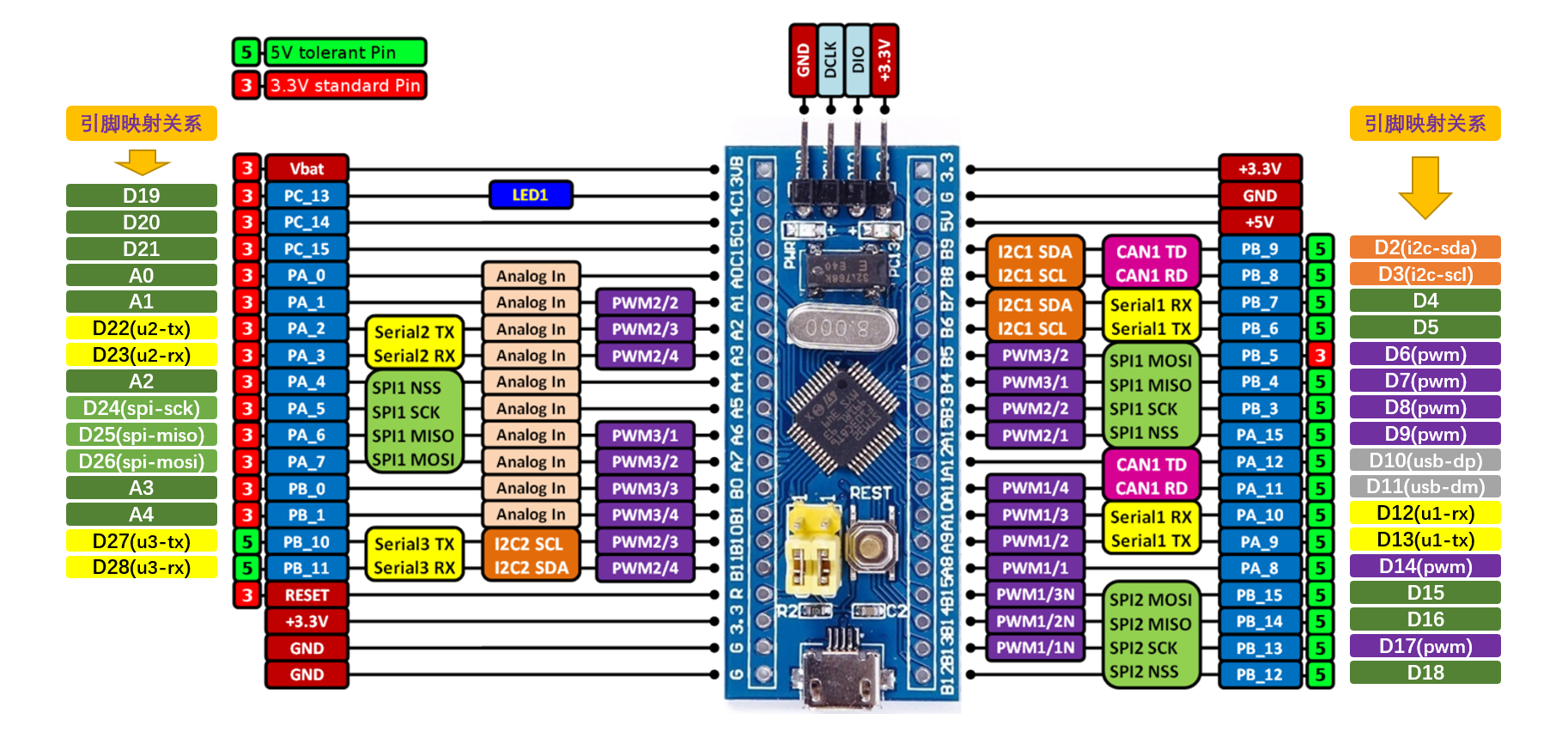
## 2 Arduino引脚排布

该BSP遵照Arduino UNO板的引脚排列方式,并扩展增加了Blue-pill自身的板载资源功能引脚。详见
`pins_arduino.c`
| Arduino引脚编号 | STM32引脚编号 | 5V容忍 | 备注 |
| --------------- | ------------- | ------ | ------------------------------------------------------------ |
| 0 (D0) | -- | | 该引脚在UNO板中为串口RX引脚,不可当做普通IO |
| 1 (D1) | -- | | 该引脚在UNO板中为串口TX引脚,不可当做普通IO |
| 2 (D2) | PB9 | 是 | I2C1-SDA,被RT-Thread的I2C设备框架i2c1总线接管,不可当做普通IO |
| 3 (D3) | PB8 | 是 | I2C1_SCL,被RT-Thread的I2C设备框架i2c1总线接管,不可当做普通IO |
| 4 (D4) | PB7 | 是 | |
| 5 (D5) | PB6 | 是 | |
| 6 (D6) | PB5 | 否 | PWM3-CH2(定时器3发生) |
| 7 (D7) | PB4 | 是 | PWM3-CH1(定时器3发生) |
| 8 (D8) | PB3 | 是 | PWM2-CH2(定时器2发生) |
| 9 (D9) | PA15 | 是 | PWM2-CH1(定时器2发生) |
| 10 (D10) | PA12 | 是 | USB-DB,不可当做普通IO |
| 11 (D11) | PA11 | 是 | USB-DM,不可当做普通IO |
| 12 (D12) | PA10 | 是 | UART1-RX,被RT-Thread的UART设备框架uart1接管,不可当做普通IO |
| 13 (D13) | PA9 | 是 | UART1-RX,被RT-Thread的UART设备框架uart1接管,不可当做普通IO |
| 14 (D14) | PA8 | 是 | PWM1-CH1(定时器1发生) |
| 15 (D15) | PB15 | 是 | |
| 16 (D16) | PB14 | 是 | |
| 17 (D17) | PB13 | 是 | PWM1-CH1N(定时器1发生) |
| 18 (D18) | PB12 | 是 | |
| 19 (D19) | PC13 | 否 | 板载LED默认引脚 |
| 20 (D20) | PC14 | 否 | |
| 21 (D21) | PC15 | 否 | |
| 22 (D22) | PA2 | 否 | UART2-TX,被RT-Thread的UART设备框架uart2接管,不可当做普通IO |
| 23 (D23) | PA3 | 否 | UART2-RX,被RT-Thread的UART设备框架uart2接管,不可当做普通IO |
| 24 (D24) | PA5 | 否 | SPI-SCK, SPI功能尚未完全实现,目前仅作普通IO使用 |
| 25 (D25) | PA6 | 否 | SPI-MISO,SPI功能尚未完全实现,目前仅作普通IO使用 |
| 26 (D26) | PA7 | 否 | SPI-MOSI,SPI功能尚未完全实现,目前仅作普通IO使用 |
| 27 (D27) | PB10 | 是 | UART3-TX,被RT-Thread的UART设备框架uart3接管,不可当做普通IO |
| 28 (D28) | PB11 | 是 | UART3-RX,被RT-Thread的UART设备框架uart3接管,不可当做普通IO |
| A0 | PA0 | 否 | ADC |
| A1 | PA1 | 否 | ADC |
| A2 | PA4 | 否 | ADC |
| A3 | PB0 | 否 | ADC |
| A4 | PB1 | 否 | ADC |
| A5 | -- | | 芯片内部参考电压 ADC |
| A6 | -- | | 芯片内部温度 ADC |
> 注意:
>
> 1. 驱动舵机和analogWrite函数要选择不同定时器发生的PWM信号引脚,由于STM32的定时器4个通道需要保持相同的频率,如果采用相同的定时器发生的PWM分别驱动舵机和analogWrite,可能会导致舵机失效。
> 4. D10引脚是PWM反相位引脚(也就是常说的互补输出引脚CHxN)。但是这里不用考虑到占空比互补问题(CHx-20%,CHxN-80%),直接正常使用即可。
> 4. STM32的PA15引脚默认作为JTAG下载使用,但是如果采用SWD调试时,PA15(D9)可以作为普通的IO口使用,但是需要设置一些寄存器。
> 参考资料
>
> 1. 暂无
## 3 I2C总线
STM32F103 Blue-Pill板的I2C总线是板上丝印的
`SCL/D3`
和
`SDA/D2`
引脚,这两个引脚是被RT-Thread I2C设备框架接管的,不需要直接操控这两个引脚,直接引用
`#include <Wire.h>`
(Arduino官方I2C头文件)即可使用。
bsp/stm32/stm32f103-blue-pill/applications/arduino_pinout/SConscript
0 → 100644
浏览文件 @
a8581ac8
from
building
import
*
cwd
=
GetCurrentDir
()
src
=
Glob
(
'*.c'
)
+
Glob
(
'*.cpp'
)
inc
=
[
cwd
]
group
=
DefineGroup
(
'Arduino'
,
src
,
depend
=
[
'PKG_USING_RTDUINO'
],
CPPPATH
=
inc
)
Return
(
'group'
)
bsp/stm32/stm32f103-blue-pill/applications/arduino_pinout/blue-pill-f103-pinout.png
0 → 100644
浏览文件 @
a8581ac8
1.1 MB
bsp/stm32/stm32f103-blue-pill/applications/arduino_pinout/pins_arduino.c
0 → 100644
浏览文件 @
a8581ac8
/*
* Copyright (c) 2006-2022, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2022-08-05 liYony first version
*/
#include <Arduino.h>
#include <board.h>
#include "pins_arduino.h"
/*
{Arduino Pin, RT-Thread Pin [, Device Name(PWM or ADC), Channel]}
[] means optional
Digital pins must NOT give the device name and channel.
Analog pins MUST give the device name and channel(ADC, PWM or DAC).
Arduino Pin must keep in sequence.
*/
const
pin_map_t
pin_map_table
[]
=
{
{
D0
},
/* RX */
{
D1
},
/* TX */
{
D2
},
/* I2C1-SDA */
{
D3
},
/* I2C1-SCL */
{
D4
,
GET_PIN
(
B
,
7
)},
{
D5
,
GET_PIN
(
B
,
6
)},
{
D6
,
GET_PIN
(
B
,
5
),
"pwm3"
,
2
},
/* PWM */
{
D7
,
GET_PIN
(
B
,
4
),
"pwm3"
,
1
},
/* PWM */
{
D8
,
GET_PIN
(
B
,
3
),
"pwm2"
,
2
},
/* PWM */
{
D9
,
GET_PIN
(
A
,
15
),
"pwm2"
,
1
},
/* PWM */
{
D10
},
/* USB-DP */
{
D11
},
/* USB-DM */
{
D12
},
/* UART1-RX */
{
D13
},
/* UART1-TX */
{
D14
,
GET_PIN
(
A
,
8
),
"pwm1"
,
1
},
/* PWM */
{
D15
,
GET_PIN
(
B
,
15
)},
{
D16
,
GET_PIN
(
B
,
14
)},
{
D17
,
GET_PIN
(
B
,
13
),
"pwm1"
,
-
1
},
/* PWM */
{
D18
,
GET_PIN
(
B
,
12
)},
{
D19
,
GET_PIN
(
C
,
13
)},
/* user led1 */
{
D20
,
GET_PIN
(
C
,
14
)},
{
D21
,
GET_PIN
(
C
,
15
)},
{
D22
},
/* UART2-TX */
{
D23
},
/* UART2-RX */
/* The connection of RTdunio SPI has not been completed, *
* and it can only be used as a common GPIO at present. */
{
D24
,
GET_PIN
(
A
,
5
)},
/* SPI-SCK */
{
D25
,
GET_PIN
(
A
,
6
)},
/* SPI-MISO */
{
D26
,
GET_PIN
(
A
,
7
)},
/* SPI-MOSI */
{
D27
},
/* UART3-TX */
{
D28
},
/* UART3-RX */
{
A0
,
GET_PIN
(
A
,
0
),
"adc1"
,
0
},
/* ADC */
{
A1
,
GET_PIN
(
A
,
1
),
"adc1"
,
1
},
/* ADC */
{
A2
,
GET_PIN
(
A
,
4
),
"adc1"
,
4
},
/* ADC */
{
A3
,
GET_PIN
(
B
,
0
),
"adc1"
,
8
},
/* ADC */
{
A4
,
GET_PIN
(
B
,
1
),
"adc1"
,
9
},
/* ADC */
{
A5
,
RT_NULL
,
"adc1"
,
17
},
/* ADC, On-Chip: internal reference voltage, ADC_CHANNEL_VREFINT */
{
A6
,
RT_NULL
,
"adc1"
,
16
}
/* ADC, On-Chip: internal temperature sensor, ADC_CHANNEL_TEMPSENSOR */
};
bsp/stm32/stm32f103-blue-pill/applications/arduino_pinout/pins_arduino.h
0 → 100644
浏览文件 @
a8581ac8
/*
* Copyright (c) 2006-2022, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2022-08-05 liYony first version
*/
#ifndef Pins_Arduino_h
#define Pins_Arduino_h
/* pins alias. Must keep in sequence */
#define D0 (0)
#define D1 (1)
#define D2 (2)
#define D3 (3)
#define D4 (4)
#define D5 (5)
#define D6 (6)
#define D7 (7)
#define D8 (8)
#define D9 (9)
#define D10 (10)
#define D11 (11)
#define D12 (12)
#define D13 (13)
#define D14 (14)
#define D15 (15)
#define D16 (16)
#define D17 (17)
#define D18 (18)
#define D19 (19)
#define D20 (20)
#define D21 (21)
#define D22 (22)
#define D23 (23)
#define D24 (24)
#define D25 (25)
#define D26 (26)
#define D27 (27)
#define D28 (28)
#define A0 (29)
#define A1 (30)
#define A2 (31)
#define A3 (32)
#define A4 (33)
#define A5 (34)
#define A6 (35)
#define F_CPU 72000000L
/* CPU: 72MHz */
#define LED_BUILTIN D19
/* Default Built-in LED */
#define RTDUINO_DEFAULT_IIC_BUS_NAME "i2c1"
#define RTDUINO_SERIAL2_DEVICE_NAME "uart2"
#define RTDUINO_SERIAL3_DEVICE_NAME "uart3"
#endif
/* Pins_Arduino_h */
bsp/stm32/stm32f103-blue-pill/board/CubeMX_Config/CubeMX_Config.ioc
浏览文件 @
a8581ac8
...
...
@@ -33,33 +33,34 @@ Mcu.Pin12=PB0
Mcu.Pin13=PB1
Mcu.Pin14=PB10
Mcu.Pin15=PB11
Mcu.Pin16=P
A8
Mcu.Pin17=PA
9
Mcu.Pin18=PA
10
Mcu.Pin19=PA1
1
Mcu.Pin16=P
B13
Mcu.Pin17=PA
8
Mcu.Pin18=PA
9
Mcu.Pin19=PA1
0
Mcu.Pin2=PD0-OSC_IN
Mcu.Pin20=PA1
2
Mcu.Pin21=PA1
3
Mcu.Pin22=PA1
4
Mcu.Pin23=PA1
5
Mcu.Pin24=P
B3
Mcu.Pin25=PB
4
Mcu.Pin26=PB
5
Mcu.Pin27=
VP_ADC1_TempSens_Input
Mcu.Pin28=VP_ADC1_
Vref
_Input
Mcu.Pin29=VP_
RTC_VS_RTC_Activate
Mcu.Pin20=PA1
1
Mcu.Pin21=PA1
2
Mcu.Pin22=PA1
3
Mcu.Pin23=PA1
4
Mcu.Pin24=P
A15
Mcu.Pin25=PB
3
Mcu.Pin26=PB
4
Mcu.Pin27=
PB5
Mcu.Pin28=VP_ADC1_
TempSens
_Input
Mcu.Pin29=VP_
ADC1_Vref_Input
Mcu.Pin3=PD1-OSC_OUT
Mcu.Pin30=VP_SYS_VS_Systick
Mcu.Pin31=VP_TIM1_VS_ClockSourceINT
Mcu.Pin32=VP_TIM2_VS_ClockSourceINT
Mcu.Pin33=VP_TIM3_VS_ClockSourceINT
Mcu.Pin30=VP_RTC_VS_RTC_Activate
Mcu.Pin31=VP_SYS_VS_Systick
Mcu.Pin32=VP_TIM1_VS_ClockSourceINT
Mcu.Pin33=VP_TIM2_VS_ClockSourceINT
Mcu.Pin34=VP_TIM3_VS_ClockSourceINT
Mcu.Pin4=PA0-WKUP
Mcu.Pin5=PA1
Mcu.Pin6=PA2
Mcu.Pin7=PA3
Mcu.Pin8=PA4
Mcu.Pin9=PA5
Mcu.PinsNb=3
4
Mcu.PinsNb=3
5
Mcu.ThirdPartyNb=0
Mcu.UserConstants=
Mcu.UserName=STM32F103C8Tx
...
...
@@ -122,6 +123,9 @@ PB10.Mode=Asynchronous
PB10.Signal=USART3_TX
PB11.Mode=Asynchronous
PB11.Signal=USART3_RX
PB13.Locked=true
PB13.Mode=PWM Generation1 CH1 CH1N
PB13.Signal=TIM1_CH1N
PB3.Signal=S_TIM2_CH2
PB4.Signal=S_TIM3_CH1
PB5.Signal=S_TIM3_CH2
...
...
@@ -195,7 +199,7 @@ SH.ADCx_IN8.0=ADC1_IN8,IN8
SH.ADCx_IN8.ConfNb=1
SH.ADCx_IN9.0=ADC1_IN9,IN9
SH.ADCx_IN9.ConfNb=1
SH.S_TIM1_CH1.0=TIM1_CH1,PWM Generation1 CH1
SH.S_TIM1_CH1.0=TIM1_CH1,PWM Generation1 CH1
CH1N
SH.S_TIM1_CH1.ConfNb=1
SH.S_TIM2_CH1_ETR.0=TIM2_CH1,PWM Generation1 CH1
SH.S_TIM2_CH1_ETR.ConfNb=1
...
...
@@ -211,8 +215,8 @@ SPI1.Direction=SPI_DIRECTION_2LINES
SPI1.IPParameters=VirtualType,Mode,Direction,BaudRatePrescaler,CalculateBaudRate
SPI1.Mode=SPI_MODE_MASTER
SPI1.VirtualType=VM_MASTER
TIM1.Channel-PWM\ Generation1\ CH1=TIM_CHANNEL_1
TIM1.IPParameters=Channel-PWM Generation1 CH1
TIM1.Channel-PWM\ Generation1\ CH1
\ CH1N
=TIM_CHANNEL_1
TIM1.IPParameters=Channel-PWM Generation1 CH1
CH1N
TIM2.Channel-PWM\ Generation1\ CH1=TIM_CHANNEL_1
TIM2.Channel-PWM\ Generation2\ CH2=TIM_CHANNEL_2
TIM2.IPParameters=Channel-PWM Generation1 CH1,Channel-PWM Generation2 CH2
...
...
bsp/stm32/stm32f103-blue-pill/board/CubeMX_Config/Src/stm32f1xx_hal_msp.c
浏览文件 @
a8581ac8
...
...
@@ -327,10 +327,17 @@ void HAL_TIM_MspPostInit(TIM_HandleTypeDef* htim)
/* USER CODE BEGIN TIM1_MspPostInit 0 */
/* USER CODE END TIM1_MspPostInit 0 */
__HAL_RCC_GPIOB_CLK_ENABLE
();
__HAL_RCC_GPIOA_CLK_ENABLE
();
/**TIM1 GPIO Configuration
PB13 ------> TIM1_CH1N
PA8 ------> TIM1_CH1
*/
GPIO_InitStruct
.
Pin
=
GPIO_PIN_13
;
GPIO_InitStruct
.
Mode
=
GPIO_MODE_AF_PP
;
GPIO_InitStruct
.
Speed
=
GPIO_SPEED_FREQ_LOW
;
HAL_GPIO_Init
(
GPIOB
,
&
GPIO_InitStruct
);
GPIO_InitStruct
.
Pin
=
GPIO_PIN_8
;
GPIO_InitStruct
.
Mode
=
GPIO_MODE_AF_PP
;
GPIO_InitStruct
.
Speed
=
GPIO_SPEED_FREQ_LOW
;
...
...
bsp/stm32/stm32f103-blue-pill/board/Kconfig
浏览文件 @
a8581ac8
...
...
@@ -15,6 +15,32 @@ menu "Onboard Peripheral Drivers"
select BSP_USING_UART1
default y
config BSP_USING_ARDUINO
bool "Support Arduino"
select PKG_USING_RTDUINO
select BSP_USING_STLINK_TO_USART
select BSP_USING_UART2
select BSP_USING_UART3
select BSP_USING_GPIO
select BSP_USING_ADC
select BSP_USING_ADC1
select BSP_USING_PWM
select BSP_USING_PWM1
select BSP_USING_PWM1_CH1
select BSP_USING_PWM2
select BSP_USING_PWM2_CH1
select BSP_USING_PWM2_CH2
select BSP_USING_PWM3
select BSP_USING_PWM3_CH1
select BSP_USING_PWM3_CH2
select BSP_USING_I2C
select BSP_USING_I2C1
imply RTDUINO_USING_SERVO
imply RTDUINO_USING_WIRE
imply RTDUINO_USING_ADAFRUIT
imply RTDUINO_USING_MSTIMER2
default n
endmenu
menu "On-chip Peripheral Drivers"
...
...
bsp/stm32/stm32f401-st-nucleo/applications/arduino_main.cpp
浏览文件 @
a8581ac8
...
...
@@ -13,11 +13,12 @@
void
setup
(
void
)
{
/* put your setup code here, to run once: */
Serial
.
begin
();
}
void
loop
(
void
)
{
/* put your main code here, to run repeatedly: */
Serial
.
println
(
"Hello Arduino!
\n
"
);
Serial
.
println
(
"Hello Arduino!"
);
delay
(
800
);
}
bsp/stm32/stm32f401-st-nucleo/board/Kconfig
浏览文件 @
a8581ac8
...
...
@@ -14,7 +14,7 @@ menu "Onboard Peripheral Drivers"
select BSP_USING_UART2
default y
config BSP_USING_ARDUINO
config BSP_USING_ARDUINO
bool "Support Arduino"
select PKG_USING_RTDUINO
select BSP_USING_STLINK_TO_USART
...
...
编辑
预览
Markdown
is supported
0%
请重试
或
添加新附件
.
添加附件
取消
You are about to add
0
people
to the discussion. Proceed with caution.
先完成此消息的编辑!
取消
想要评论请
注册
或
登录
{kind=link}