
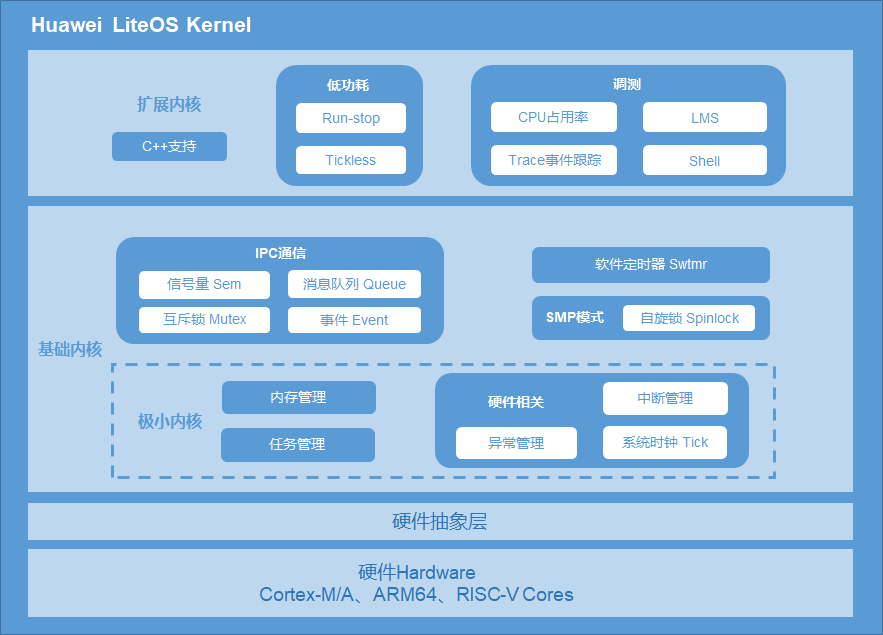
规范和补充中断,定时器,互斥量,信号量模块注解.
搜索 @note_pic 方便理解画的字符图 搜索 @note_why 尚未看明白的地方,如果您看明白了,请告知完善 搜索 @note_thinking 一点思考和吐槽的地方 搜索 @note_#if0 由第三方项目提供不由内核源码中定义的极为重要的结构体,为方便理解而添加的 搜索 @note_good 给源码点赞
Showing
{kind=link}
36.1 KB
{kind=link}
14.8 KB
{kind=link}
10.5 KB
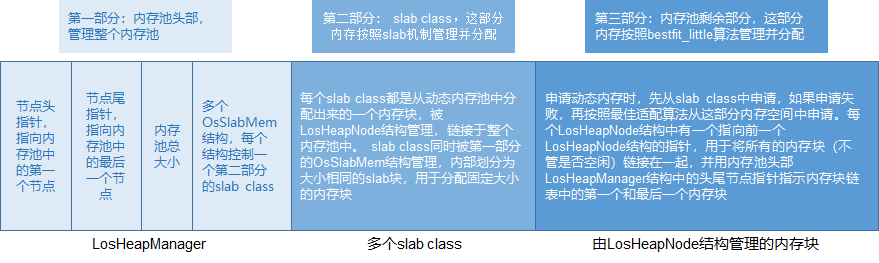
zzz/pic/turing/slab机制.png
0 → 100644
{kind=link}
50.2 KB
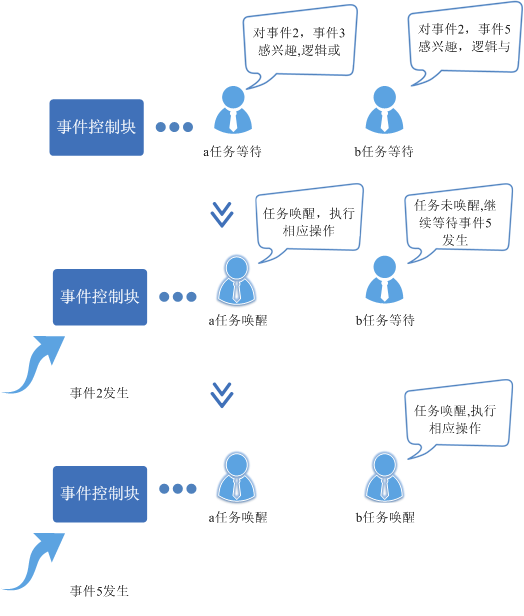
zzz/pic/turing/事件唤醒任务示意图.png
0 → 100644
{kind=link}
50.9 KB
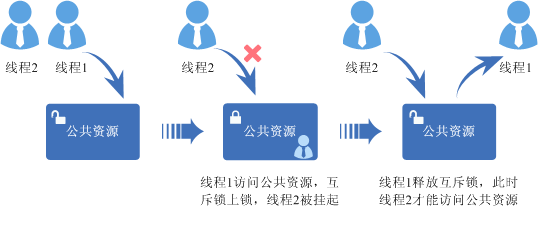
zzz/pic/turing/互斥锁运作示意图.png
0 → 100644
{kind=link}
16.0 KB
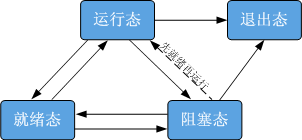
zzz/pic/turing/任务状态示意图.png
0 → 100644
{kind=link}
6.6 KB
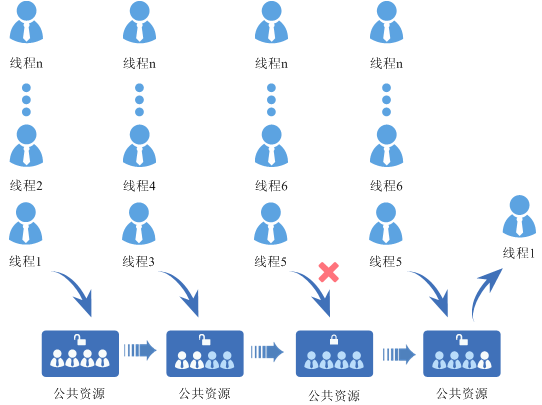
zzz/pic/turing/信号量运作示意图.png
0 → 100644
{kind=link}
25.4 KB
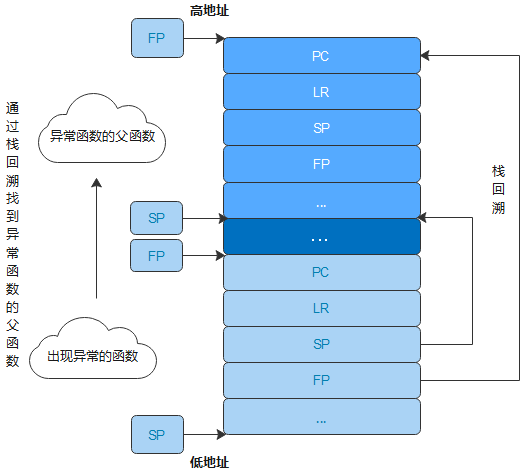
zzz/pic/turing/堆栈分析原理示意图.png
0 → 100644
{kind=link}
27.4 KB
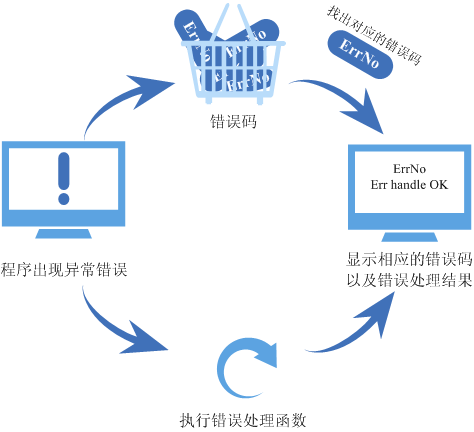
zzz/pic/turing/错误处理示意图.png
0 → 100644
{kind=link}
22.8 KB
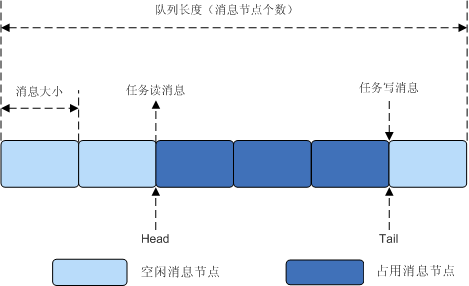
zzz/pic/turing/队列读写数据操作示意图.png
0 → 100644
{kind=link}
9.4 KB
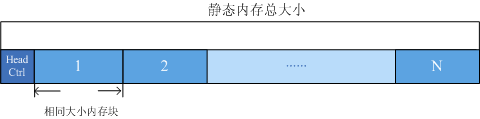
zzz/pic/turing/静态内存示意图.png
0 → 100644
{kind=link}
4.1 KB
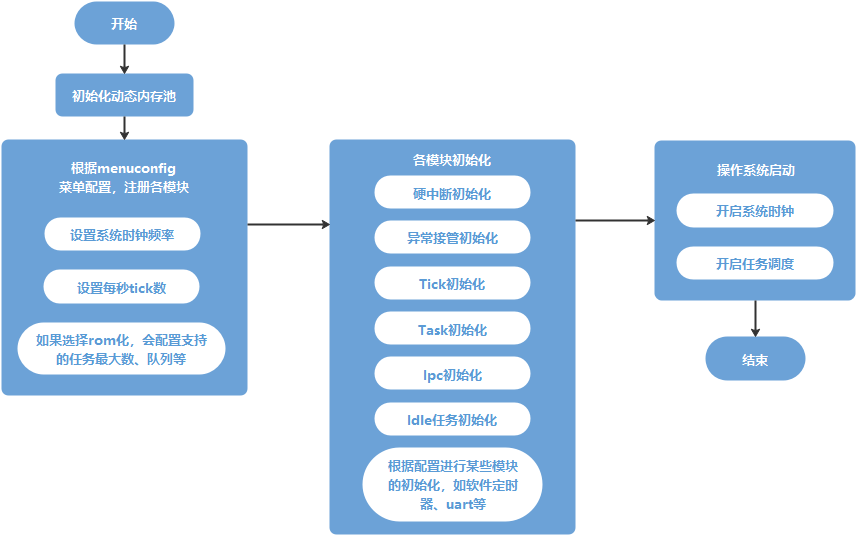
zzz/pic/turing/鸿蒙内核启动流程图.png
0 → 100644
{kind=link}
47.5 KB