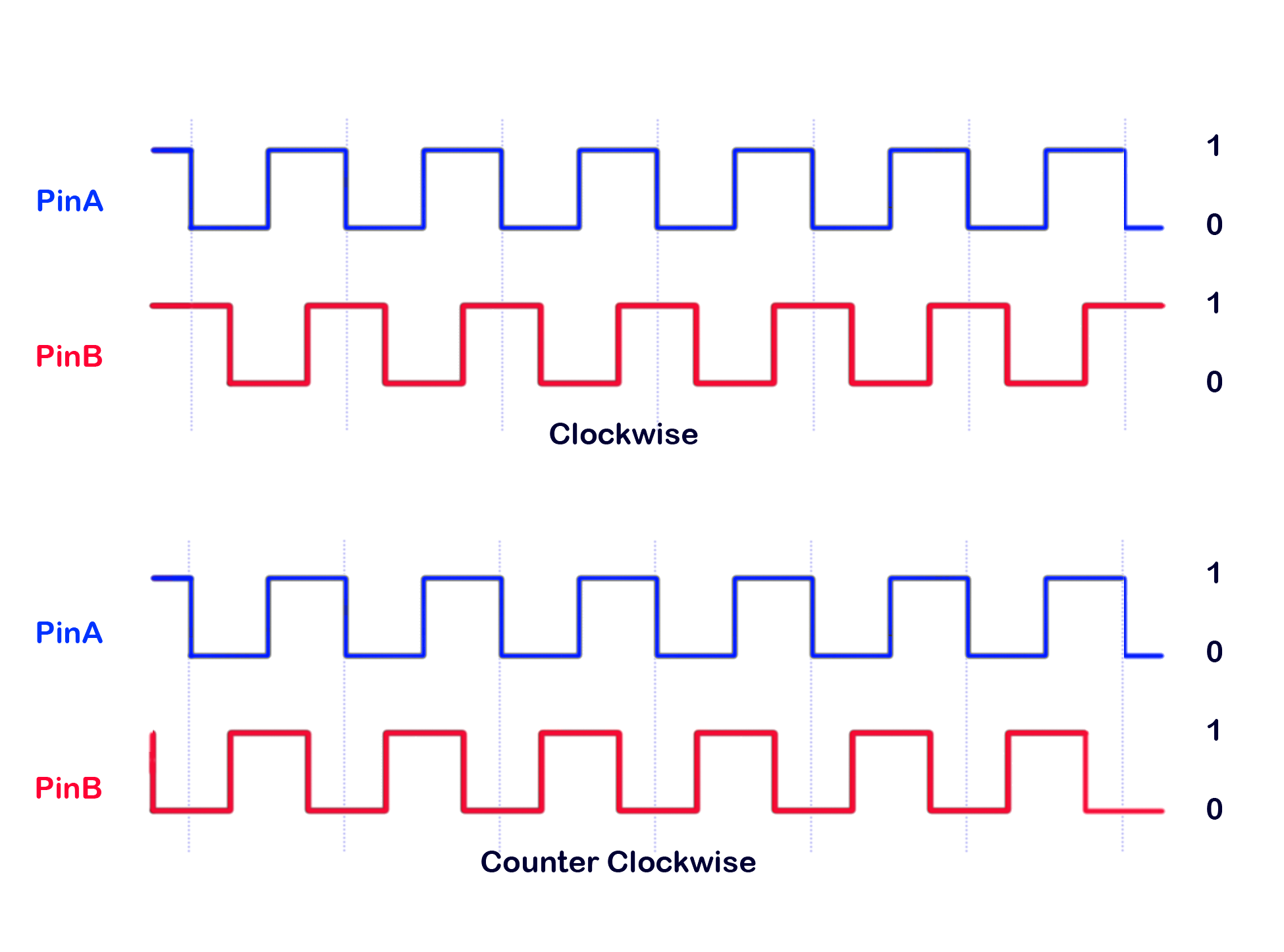
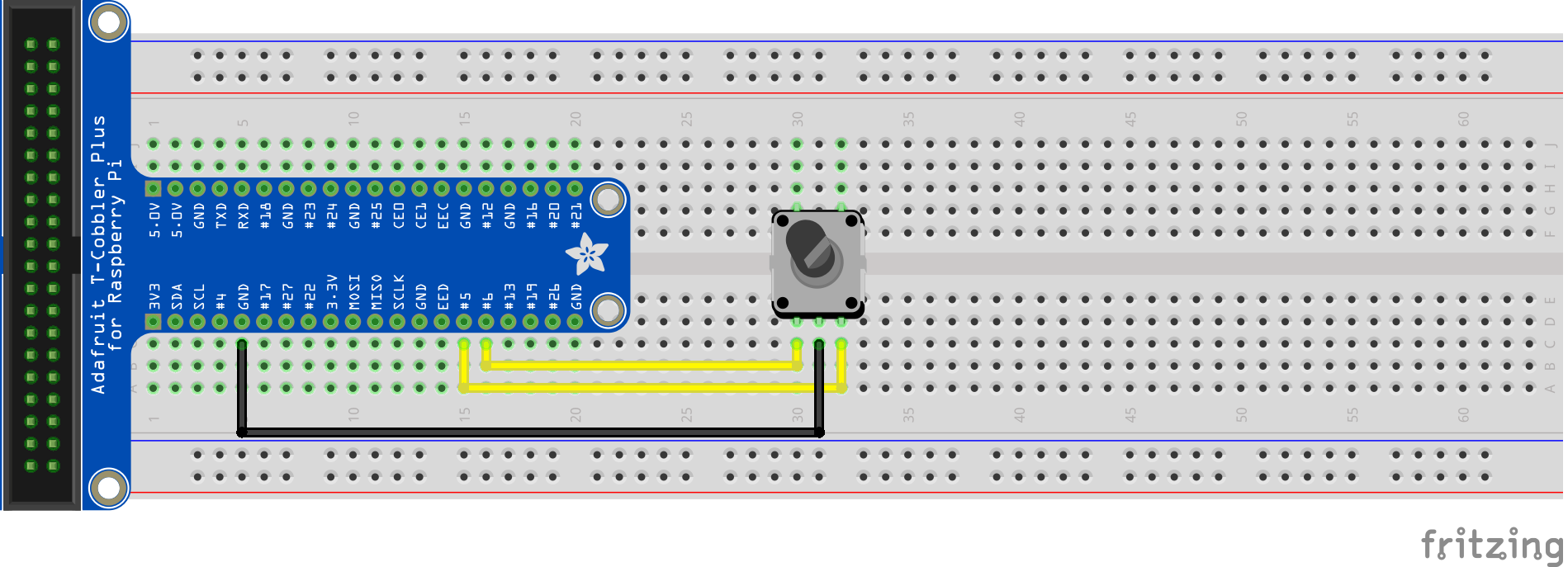
Add RotaryEncoder Binding (#705)
* Add RotaryEncoder Binding
* Created a Separate Scaled binding and added properties to represent rotation.
* Adjusting rotary with limitations, simplifying without generics, nullable enabled
* Adjusting based on PR feedback
* Correcting sample
Co-authored-by: NLaurent Ellerbach <laurelle@microsoft.com>
Showing
{kind=link}
233.5 KB
{kind=link}

10.6 KB
{kind=link}
283.7 KB