Merge pull request #1 from dotnet/samples
Add initial samples
Showing
samples/README.md
0 → 100644
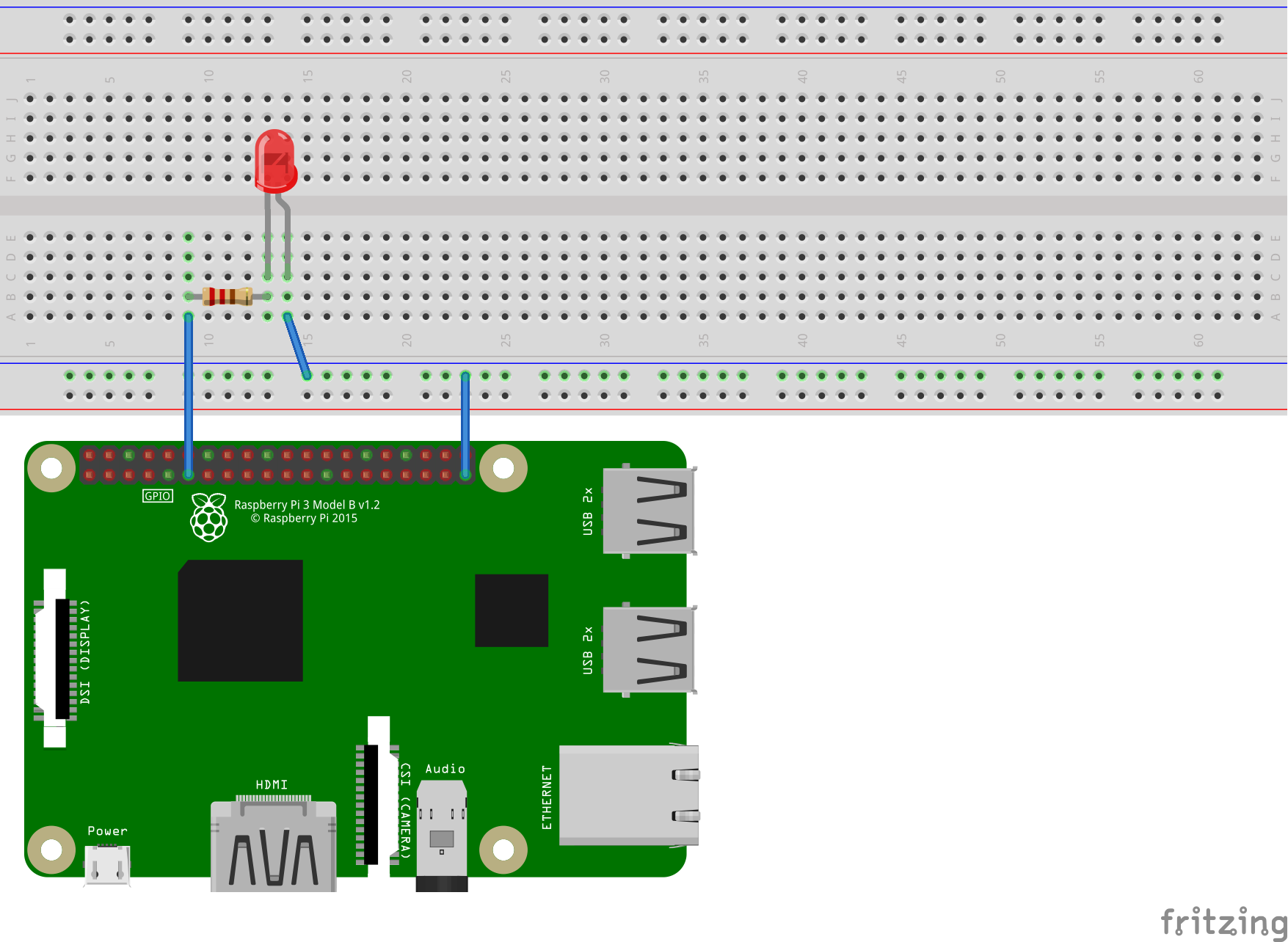
samples/led-blink/Program.cs
0 → 100644
samples/led-blink/README.md
0 → 100644
samples/led-blink/nuget.config
0 → 100644
samples/led-blink/rpi-led.fzz
0 → 100644
文件已添加
samples/led-blink/rpi-led_bb.png
0 → 100644
{kind=link}
296.3 KB
{kind=link}
351.5 KB
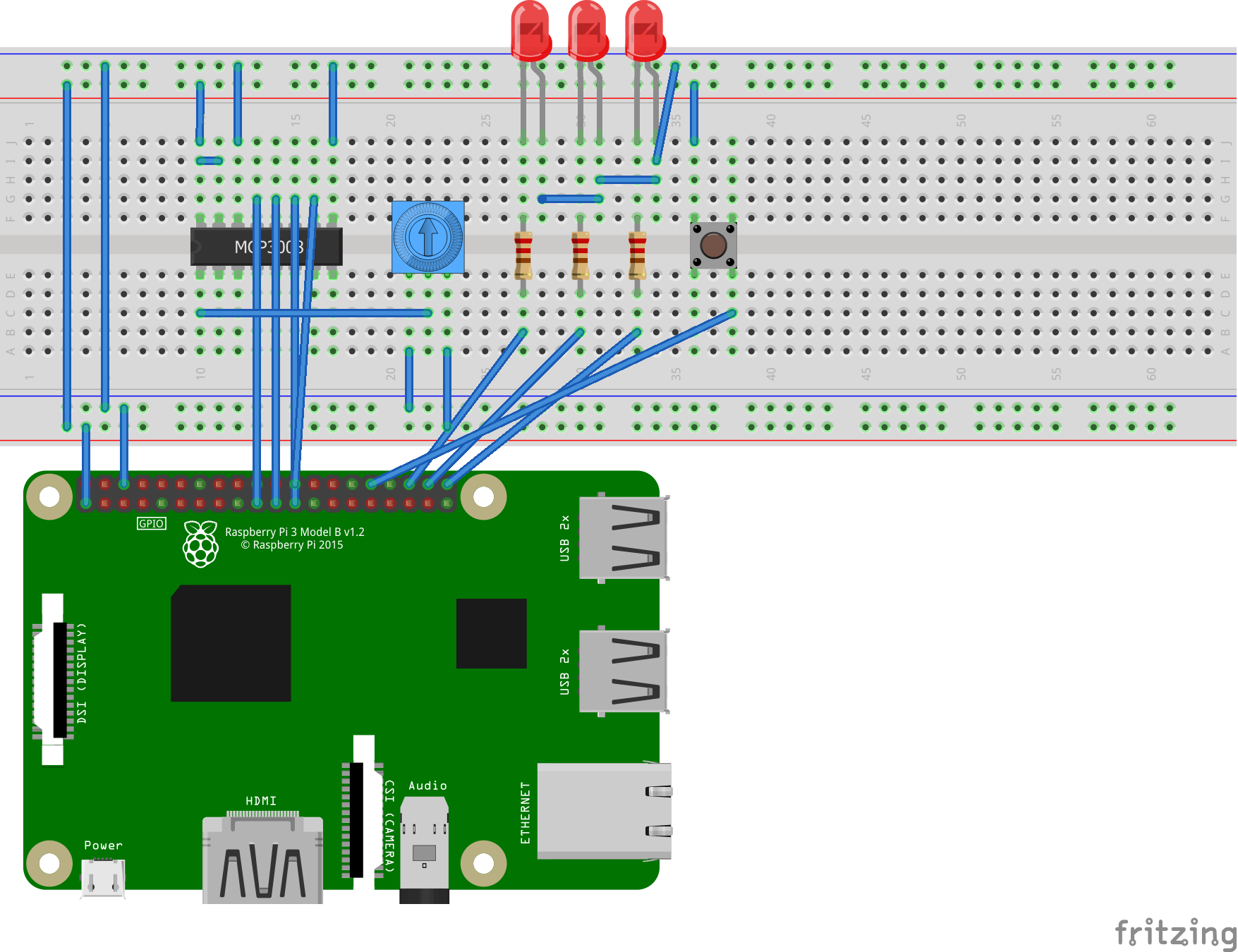
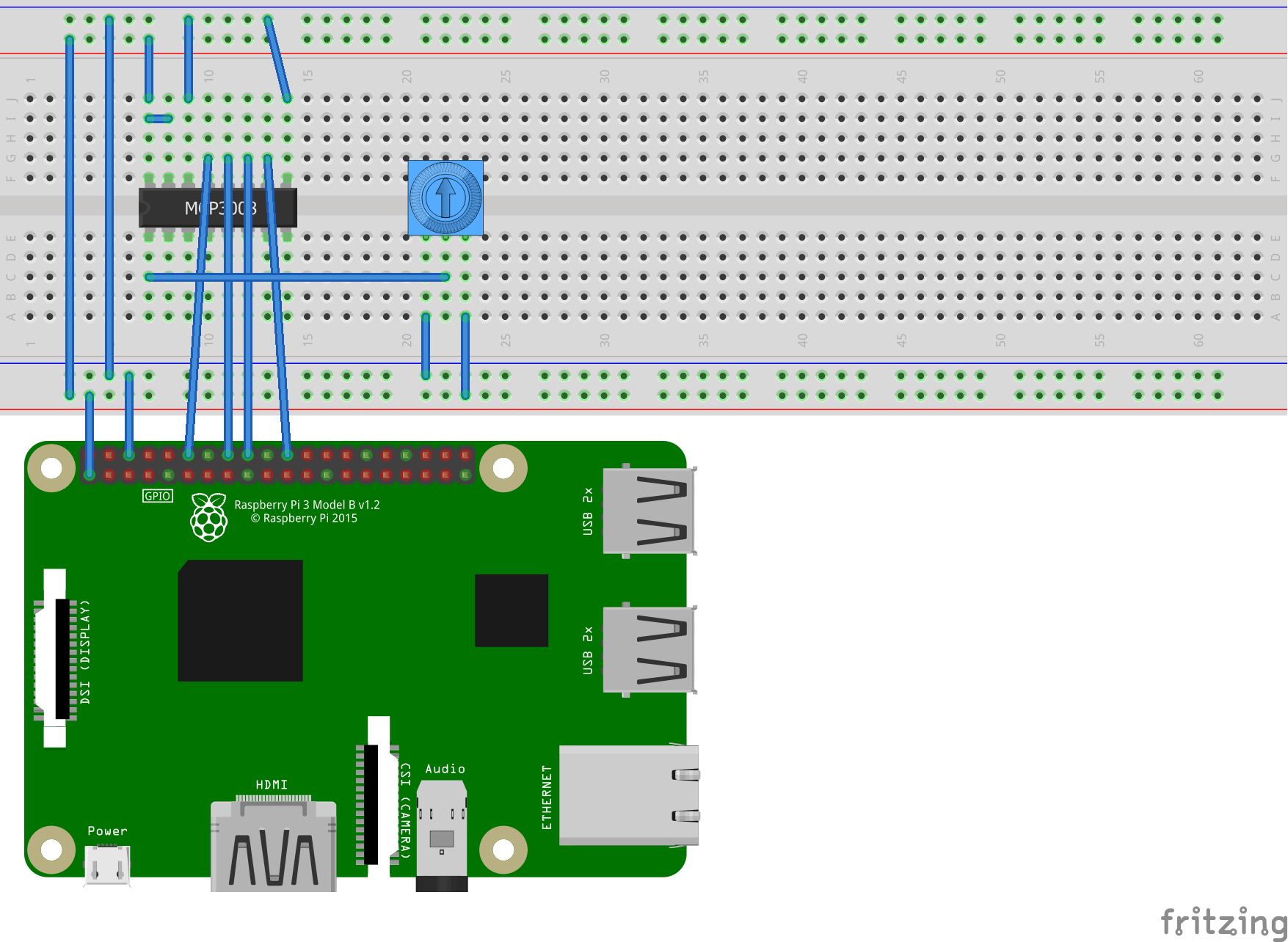
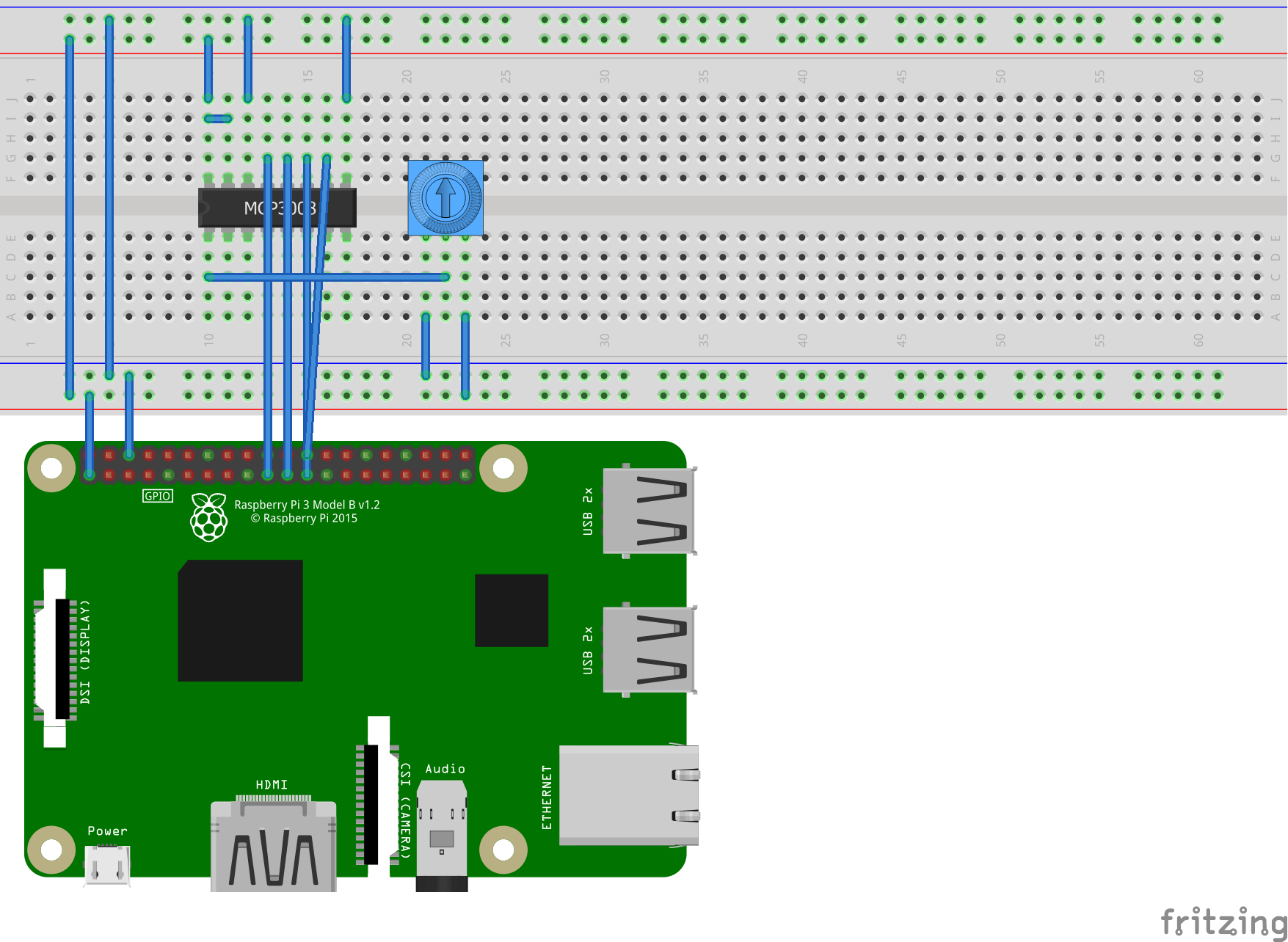
samples/trimpot/Mcp3008.cs
0 → 100644
samples/trimpot/Program.cs
0 → 100644
samples/trimpot/README.md
0 → 100644
samples/trimpot/nuget.config
0 → 100644
文件已添加
文件已添加
{kind=link}
326.3 KB
{kind=link}
324.3 KB
samples/trimpot/trimpot.csproj
0 → 100644