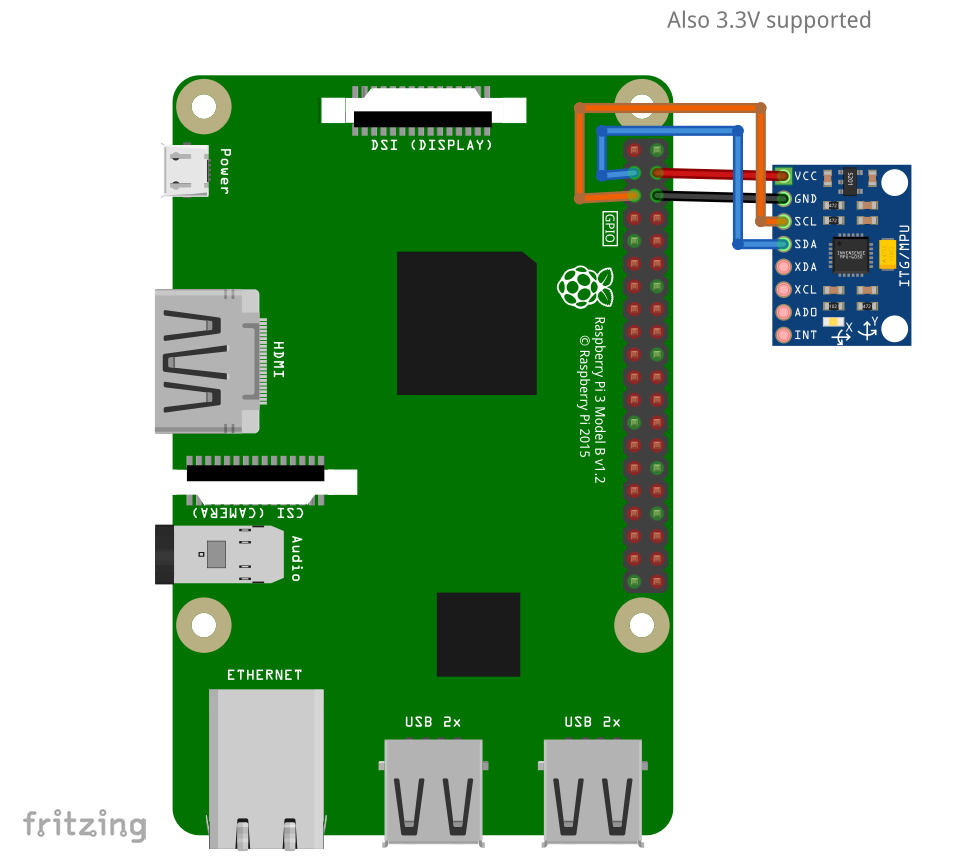
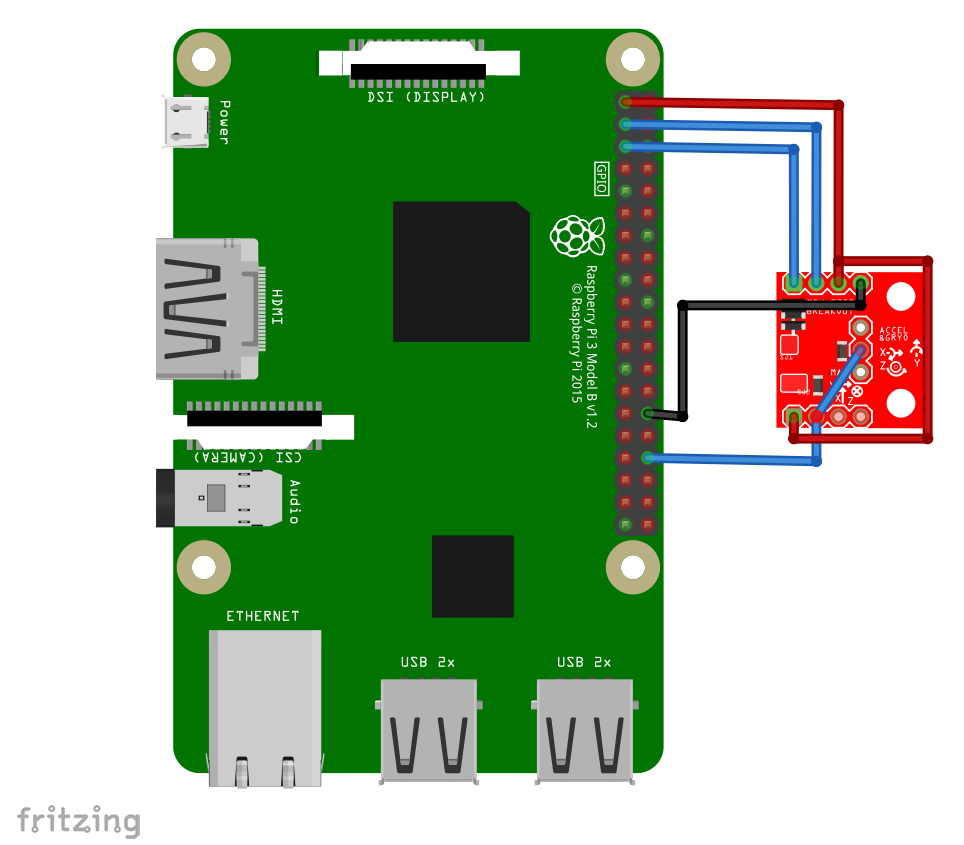
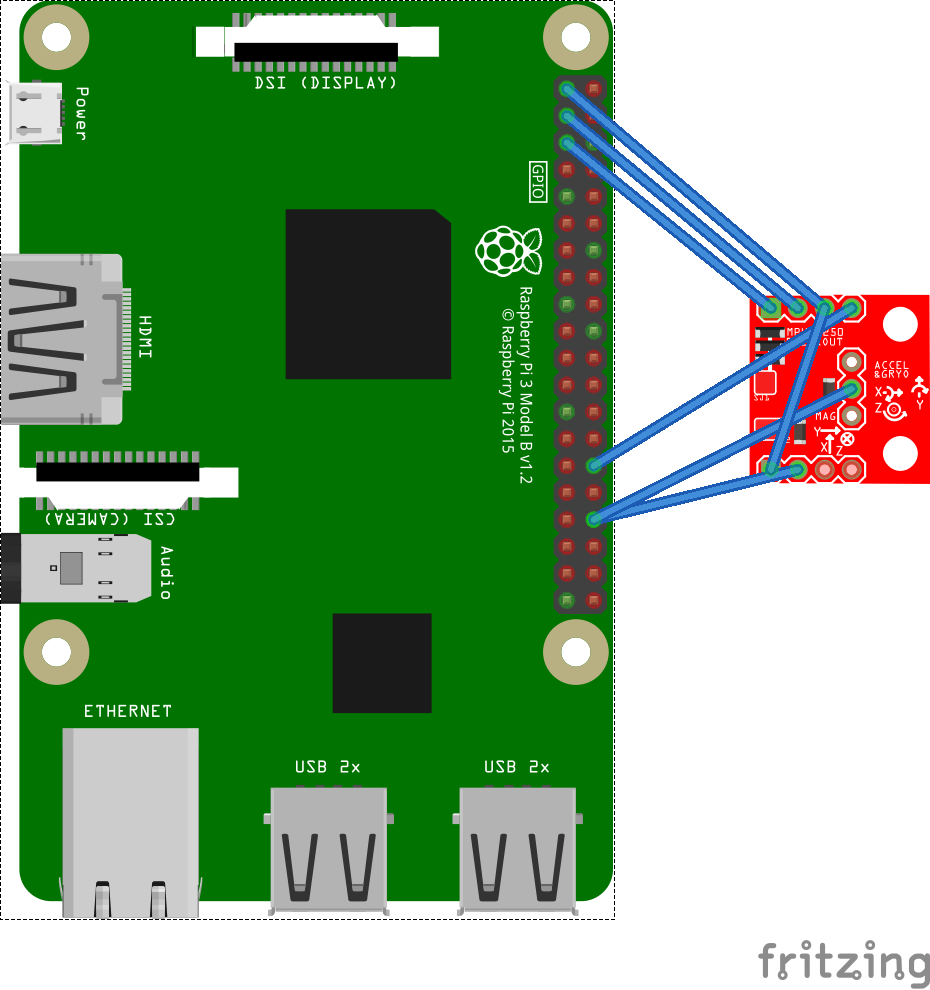
Added MPU6050 support (#1762)
* Added MPU6050 Based on MPU6886 * Remove MPU6050 folder * Moved the Fritzing file to a new schema folder and added a schema for mpu6050 * Added MPU6050 sensor * Adjusting MPU6500 to remove duplicate code * Added null check, and updated README * Rename Mpu folder and upload images * Change device name in README Co-authored-by: NLaurent Ellerbach <laurelle@microsoft.com> Co-authored-by: NLaurent Ellerbach <laurelle@microsoft.com>
Showing
文件已移动
文件已移动
文件已移动
文件已移动
文件已添加
文件已添加
文件已移动
文件已移动
文件已移动
文件已移动
文件已移动
{kind=link}
111.2 KB
{kind=link}
113.6 KB
文件已移动
文件已删除
{kind=link}
110.5 KB