added ht1632 (#1711)
Co-authored-by: NJose Perez Rodriguez <joperezr@microsoft.com>
Showing
src/devices/Ht1632/ClockMode.cs
0 → 100644
src/devices/Ht1632/ComOption.cs
0 → 100644
src/devices/Ht1632/Command.cs
0 → 100644
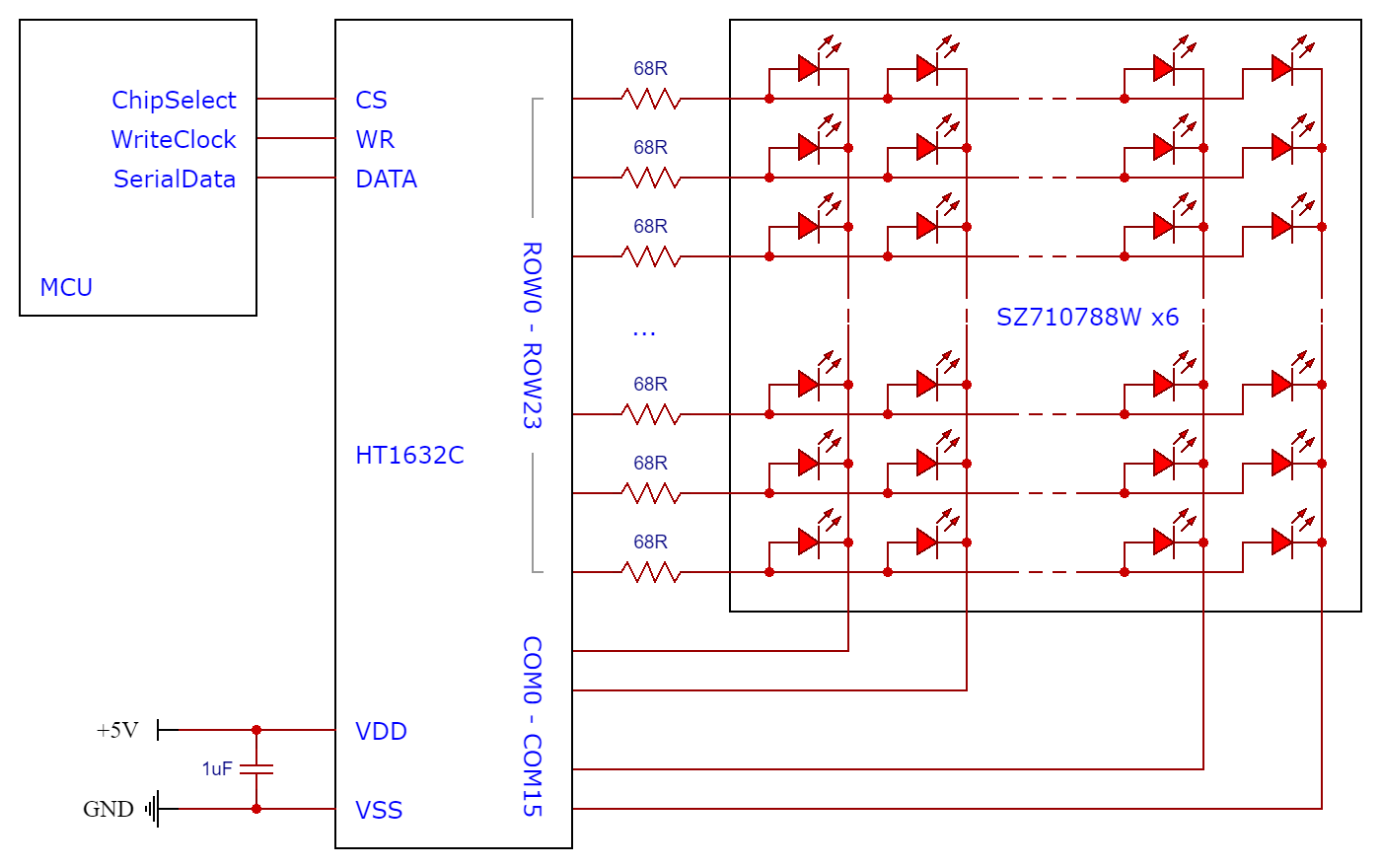
src/devices/Ht1632/Ht1632.cs
0 → 100644
src/devices/Ht1632/Ht1632.csproj
0 → 100644
src/devices/Ht1632/Ht1632.sln
0 → 100644
src/devices/Ht1632/Id.cs
0 → 100644
src/devices/Ht1632/README.md
0 → 100644
src/devices/Ht1632/category.txt
0 → 100644
{kind=link}
92.9 KB
{kind=link}
425.0 KB
{kind=link}

1.2 KB
{kind=link}
436.0 KB